基于Matlab的GPS/北斗系统抗脉冲与窄带干扰算法研究及仿真验证
随着全球导航卫星系统(GNSS)的广泛应用,导航信号的抗干扰能力受到越来越多的关注。北斗卫星导航系统在民用与军用领域均扮演着重要角色,但其接收信号功率极低,极易受到复杂电磁环境中强干扰的影响。本文针对北斗中频信号,设计并实现了一套抗脉冲干扰与窄带干扰的仿真平台。针对脉冲干扰,研究并验证了脉冲置零法与脉冲限幅法的抑制效果;针对窄带干扰,重点实现了K 值固定门限法、一阶矩门限法、中值门限法和频域自适应门限法等典型频域抑制算法。仿真结果表明,不同算法对干扰信号具有明显抑制作用,其中自适应门限法在保证信号完整性的同时表现出较强的鲁棒性。研究结果可为实际北斗接收机的抗干扰设计提供参考。
作者:张家梁(自研改进)
引言
全球导航卫星系统(GNSS)已经成为现代社会不可或缺的基础设施,在交通运输、通信、电力调度以及国防安全等多个领域发挥着关键作用。由于卫星信号功率极低(约 -130 dBm 量级),接收机端的导航信号极易受到各种人为或非人为干扰的影响。一旦发生强干扰,将导致定位精度显著下降,甚至出现信号失锁、服务中断等严重后果。因此,提升导航系统的抗干扰能力具有重要意义。
在众多干扰类型中,脉冲干扰和窄带干扰是两类常见且危害性较大的干扰方式。脉冲干扰能在时域上造成短时间的高能量冲击,从而严重破坏信号波形;而窄带干扰则通过单频或多音方式叠加到接收信号中,在频域上形成显著干扰峰值,影响接收机的捕获与跟踪性能。针对这两类干扰,国内外学者提出了多种抑制方法,包括时域限幅、时域置零、固定门限法以及基于统计特性的自适应门限法等。
本文围绕北斗 B3I 信号,构建了一个中频采样仿真平台,对典型抗干扰方法进行了实现与性能验证。在脉冲干扰方面,采用时域限幅法与置零法对异常幅值点进行抑制;在窄带干扰方面,研究了 K 值法、一阶矩法、中值门限法及自适应门限法等频域算法。通过对比仿真结果,可以直观分析各类方法的抑制效果与适用场景,从而为实际接收机的抗干扰算法选择提供参考和依据。
系统架构
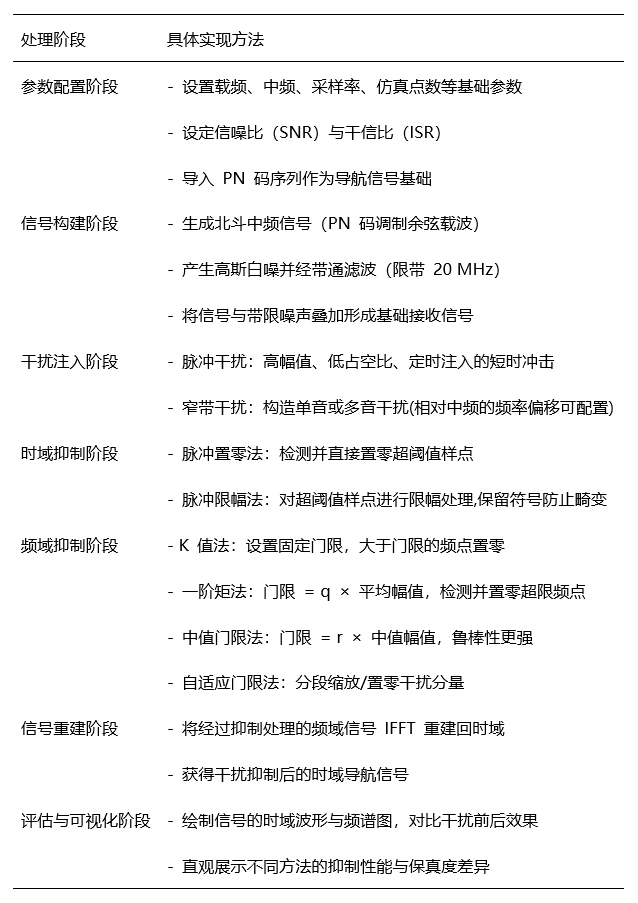
1.系统概述
本系统旨在实现基于北斗中频信号的抗脉冲干扰与抗窄带干扰仿真验证。系统的核心目标是在复杂电磁环境下,通过典型的时域与频域干扰抑制算法(如脉冲限幅、脉冲置零、K 值法、一阶矩法、中值门限法以及自适应门限法),对受干扰的导航信号进行有效恢复与分析,从而评估不同算法的抑制效果与适用场景。
整体架构由四个层次构成:
输入层
(1)提供系统基本参数,包括载频、中频、采样率、信噪比(SNR)及干信比(ISR)。
(2)加载北斗 PN 码数据,用于构造导航信号。
(3)设定干扰注入方式与参数,包括脉冲干扰幅值、占空比、注入时刻以及单音/多音干扰的频率与数量。
干扰生成与信号构建层
(1)生成带限高斯白噪声,并与北斗中频信号叠加,构成基础接收信号。
(2)根据设定参数注入脉冲干扰和窄带干扰,得到受干扰的观测信号。
(3)对观测信号进行窗函数加权和 FFT 处理,获得频谱特性。
干扰抑制层
(1)在时域上,采用脉冲置零法与脉冲限幅法对突发脉冲干扰进行抑制。
(2)在频域上,分别实现 K 值法、一阶矩法、中值门限法以及自适应门限法,对单音或多音窄带干扰进行消除。
(3)通过 IFFT 将抑制后的信号重建回时域,以便后续性能评估。
输出与可视化层
(1)绘制各阶段信号的时域波形与频谱图,包括干扰前、干扰后及干扰抑制后的对比。
(2)展示不同算法在干扰抑制下的效果直观差异。
(3)为算法性能分析提供实验支撑,包括干扰抑制度与信号保真度的直观体现。
通过上述架构,本系统实现了一个从 参数配置 → 干扰注入 → 抑制处理 → 可视化评估 的完整闭环仿真流程,为北斗导航信号在复杂干扰环境下的抗干扰算法研究提供了高效、直观的验证平台。
2.系统流程图
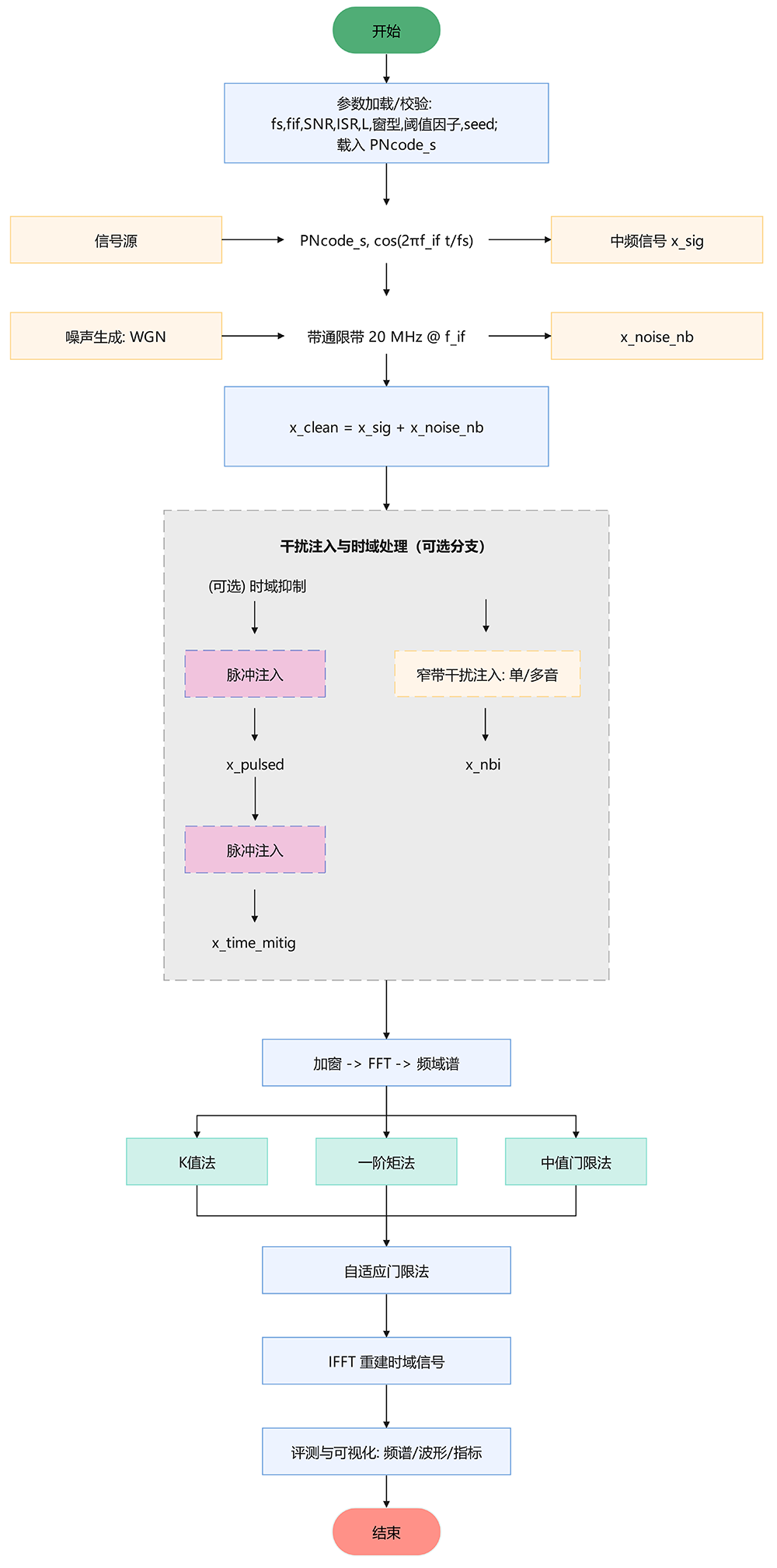
研究方法
研究方法:本研究通过构建北斗中频信号仿真平台,在受脉冲干扰与窄带干扰的情况下,分别采用时域置零与限幅,以及频域 K 值法、一阶矩法、中值门限法和自适应门限法对干扰信号进行抑制与对比分析。
实验结果
实验结果表明:在时域抑制方面,脉冲置零法能够完全去除超阈值样点,抑制效果明显,但会带来一定的信息丢失;脉冲限幅法在有效削弱脉冲尖峰的同时,较好地保留了信号符号特性,信号波形完整性优于置零法。在频域抑制方面,K 值法与一阶矩法均能明显消除窄带干扰谱线,但对门限的选取较为敏感;中值门限法利用中值统计量设定阈值,鲁棒性更强,能够在抑制干扰的同时减少误杀有用信号;自适应门限法基于指数分布分段处理干扰分量,表现出最优的干扰抑制效果与信号保真度平衡。整体而言,所设计的仿真平台能够有效验证不同抗干扰算法的性能差异,其中自适应门限法综合性能最佳。
运行restrain_gps_jam.m
图 1 高斯噪声与带限噪声频谱
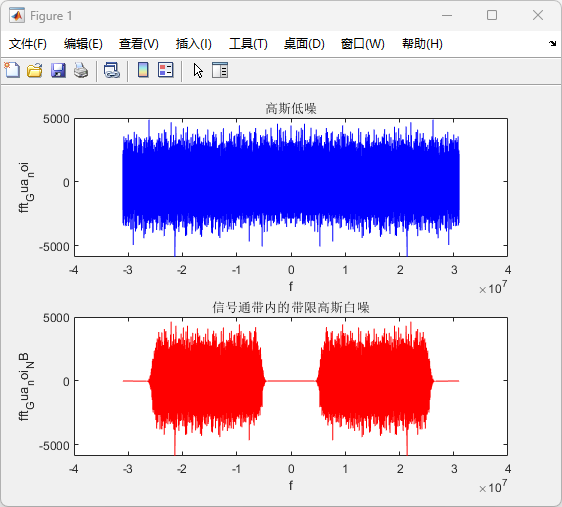
说明:上图是原始高斯白噪声频谱,能量在整个采样带宽内均匀分布;下图是经过带通滤波器限带后的噪声,能量主要集中在 20 MHz 信号通带范围内。
分析:滤波有效地抑制了带外噪声,保证后续仿真只在有效信号带宽内进行干扰分析。
图 2 导航信号与脉冲干扰
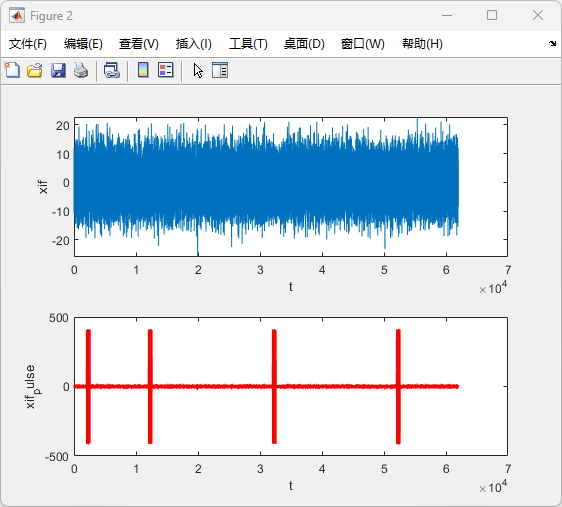
说明:上图为叠加高斯噪声的导航中频信号;下图显示了在 4 个时间点注入的强脉冲干扰。
分析:脉冲幅度远大于信号幅度,呈现出典型的短时高能量冲击,极易淹没导航信号,验证了脉冲干扰的破坏性。
图 3 时域脉冲抑制效果
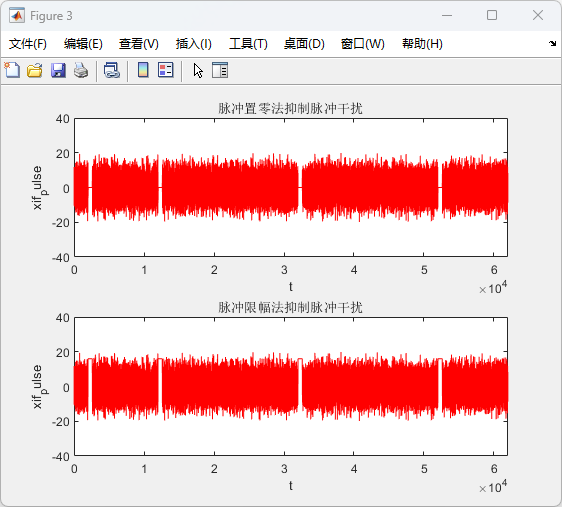
说明:上图为脉冲置零法输出,下图为脉冲限幅法输出。
分析:两种方法均能有效削弱脉冲尖峰。置零法完全去除超阈值样点,但会引入信息丢失;限幅法则保留信号符号,但会引入一定波形畸变。总体来看,两者均能恢复信号的可用性。
图 4 K 值法抑制窄带干扰
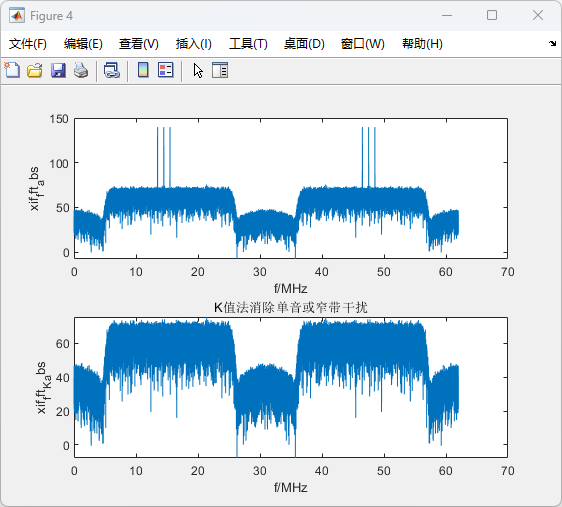
说明:上图为加窗 FFT 后的频谱,窄带干扰表现为突出的离散谱线;下图为 K 值法处理后频谱。
分析:超过门限的干扰频点被置零,谱线消失明显。但固定门限对门限选择敏感,过低会误杀信号,过高则残留干扰。
图 5 一阶矩法抑制窄带干扰
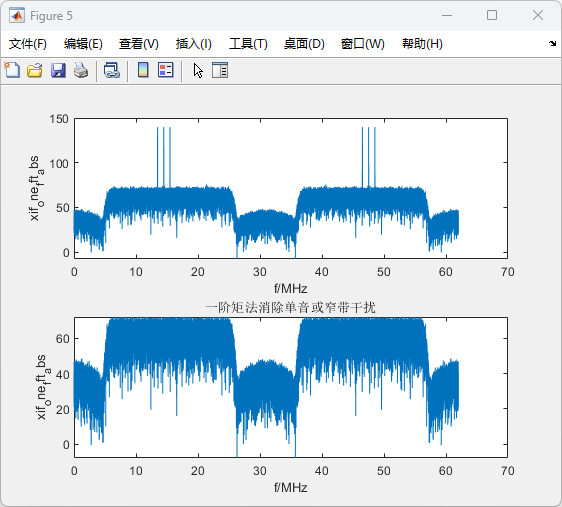
说明:上图为原始频谱,下图为一阶矩门限法处理后的频谱。
分析:该方法基于平均幅值设定门限,相比固定阈值具有一定适应性。抑制效果良好,但对平均值的估计仍可能受强干扰偏移影响。
图 6 中值门限法抑制窄带干扰
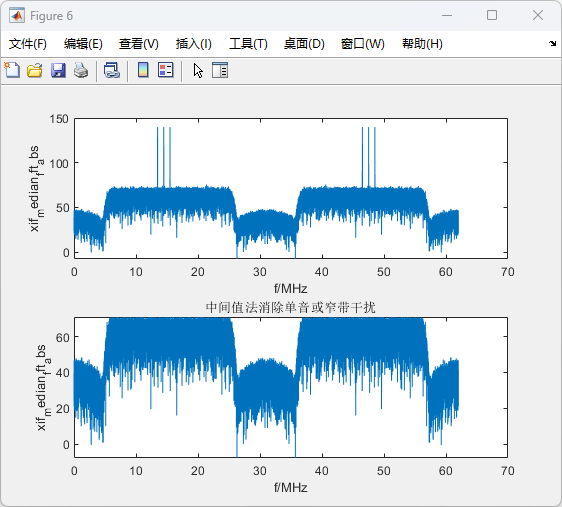
说明:上图为原始频谱,下图为中值门限法处理后的频谱。
分析:利用中值而非平均值作为统计量,鲁棒性更强,能有效减少干扰谱线,同时较少误杀有用信号。相比一阶矩法,抑制更稳健。
图 7 自适应门限法抑制窄带干扰
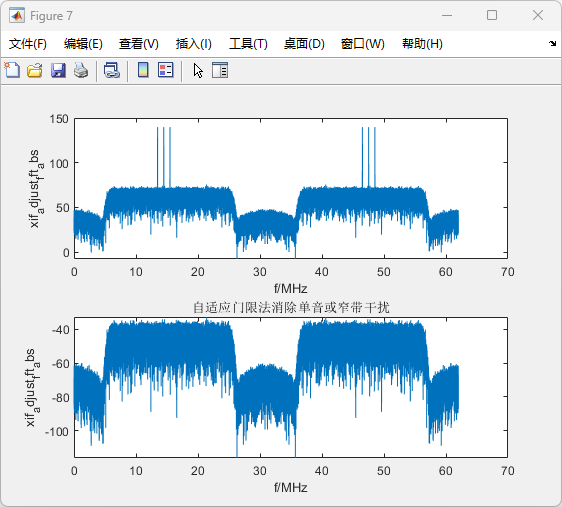
说明:上图为原始频谱,下图为自适应门限法处理后的频谱。
分析:该方法基于指数分布假设,分段缩放或置零干扰分量,实现了对不同强度干扰的分级抑制。结果显示干扰谱线几乎完全消除,噪声底显著平滑,抗干扰性能最优。
系统实现
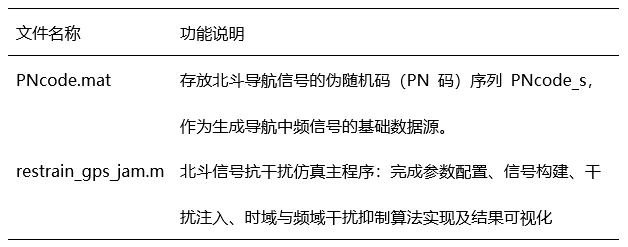
本系统完全基于MATLAB平台开发,主要集成以下脚本与模块:
研究结论
本研究基于北斗中频信号仿真平台,系统验证了脉冲置零法、脉冲限幅法、K 值法、一阶矩法、中值门限法以及自适应门限法的抗干扰性能。结果表明,时域方法能够有效削弱脉冲干扰,其中限幅法在抑制冲击的同时较好保留了信号结构;频域方法对窄带干扰表现出显著抑制效果,K 值法与一阶矩法对门限选择敏感,中值门限法在鲁棒性方面更优,而自适应门限法利用统计特性实现了对不同强度干扰的分段抑制,在兼顾抑制能力与信号保真度方面表现最佳。整体而言,本文提出的仿真与对比验证方法为北斗接收机的抗干扰算法设计与优化提供了有益参考。
实验环境
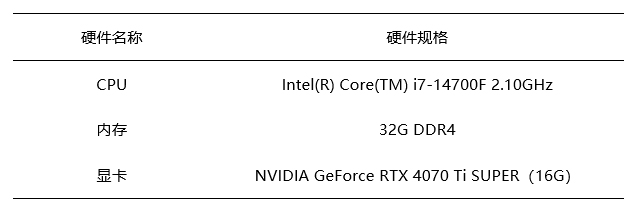
硬件配置如表:实验所用硬件平台为惠普(HP)暗影精灵10台式机整机,运行 Windows 11 64 位操作系统,作为模型训练与测试的主要计算平台,能够良好支持Matlab的开发需求。
官方声明
实验环境真实性与合规性声明:
本研究所使用的硬件与软件环境均为真实可复现的配置,未采用虚构实验平台或虚拟模拟环境。实验平台为作者自主购买的惠普(HP)暗影精灵 10 台式整机,具体硬件参数详见表。软件环境涵盖操作系统、开发工具、深度学习框架、MATLAB工具等,具体配置详见表,所有软件组件均来源于官方渠道或开源社区,并按照其许可协议合法安装与使用。
研究过程中严格遵循学术诚信和实验可复现性要求,确保所有实验数据、训练过程与结果均可在相同环境下被重复验证,符合科研规范与工程实践标准。
版权声明:
本算法改进中涉及的文字、图片、表格、程序代码及实验数据,除特别注明外,均由7zcode.张家梁独立完成。未经7zcode官方书面许可,任何单位或个人不得擅自复制、传播、修改、转发或用于商业用途。如需引用本研究内容,请遵循学术规范,注明出处,并不得歪曲或误用相关结论。
本研究所使用的第三方开源工具、框架及数据资源均已在文中明确标注,并严格遵守其相应的开源许可协议。使用过程中无违反知识产权相关法规,且全部用于非商业性学术研究用途。