从浅入深:自编码器(AE)与变分自编码器(VAE)的核心原理与Pytorch代码讲解
背景:为什么需要VAE?
在深度学习中,我们经常需要生成数据,例如:
生成类似真实人脸的图片
生成逼真的语音
从数据中学到潜在的低维表示(降维)
早期的方法,普通Autoencoder(自编码器):
它把数据压缩到一个低维的“隐空间”再解码回来,学习到一个确定性映射。
核心思想:自我压缩与解压
例如:我给你一本很厚的书,要求你用一张小纸条写下这本书的核心内容,然后我把书拿走,让你只看这张小札条,再把整本书的内容复述出来。
这个过程听起来很难,为了能成功复述,你写在纸条上的必须是这本书最精髓、最具代表性的信息。你不能只是摘抄第一页,而是要真正“理解”了整本书,并将其压缩成精华。
自编码器做的就是类似的事情。它是一个无监督学习的神经网络模型,其基本目标非常简单:输入什么,就输出什么。也就是说,它试图学习一个恒等函数 f(x)=x。
你可能会问,这有什么意义呢?如果只是复制输入,那也太简单了。
这里的巧妙之处在于模型的结构设计。
自编码器的两大核心组件:
一个标准的自编码器由两部分组成:
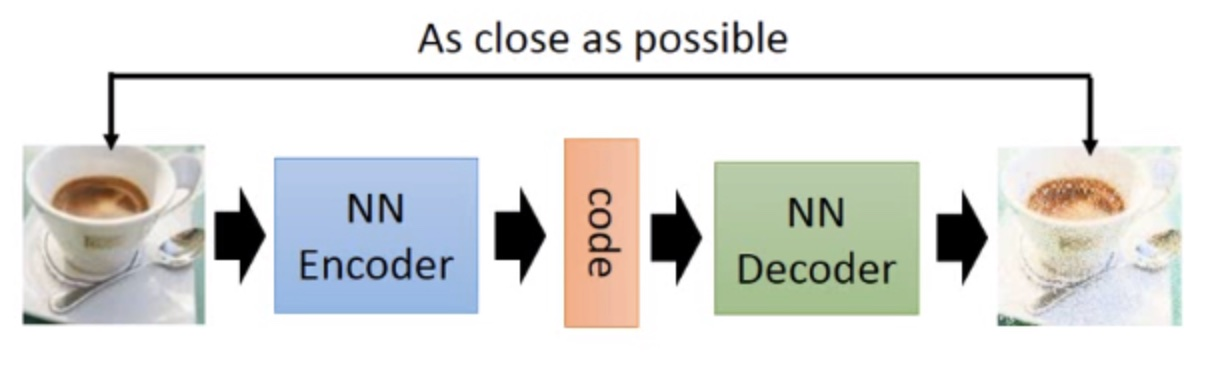
1.编码器 (Encoder):它的任务就像我们前面提到的“阅读并总结”。它接收原始的、高维度的数据(比如一张图片的所有像素),然后把它“压缩”成一个维度低得多的潜在表示 (Latent Representation)。这个压缩后的信息通常被称为“编码”或“瓶颈特征 (Bottleneck)”。我们可以把这个过程表示为 z=encoder(x),其中 x 是输入,z 是压缩后的编码。
2.解码器 (Decoder):它的任务则是“根据总结复述全书”。它接收编码器产生的低维度编码 z,并尽力将其“解压”或者说“重建”为原始的高维度数据。这个过程可以表示为 x′=decoder(z),其中 x′ 是重建后的输出。
整个模型的结构就像一个沙漏,从宽(输入层)到窄(瓶颈层),再到宽(输出层)。
输入数据 (x) → 编码器 → 潜在表示 (z) → 解码器 → 重建数据 (x')
学习的目标:
自编码器的训练目标是让重建数据 x′ 与原始输入数据 x 之间的差异尽可能小。我们用一个损失函数 (Loss Function),也叫重构误差 (Reconstruction Error),来衡量这个差异。例如,对于图像数据,我们通常使用均方误差 (Mean Squared Error)。模型会通过反向传播算法,不断调整编码器和解码器的参数,来最小化这个损失 L(x,x′)。
现在,我们回到那个关键问题:这为什么有用?
由于瓶颈层的维度远低于输入层,模型不可能简单地将输入数据“死记硬背”过去。为了能够成功地重建原始数据,编码器必须学会忽略数据中的噪声和不重要的细节,提取出数据中最核心、最本质的特征。
换句话说,自编码器被迫去“理解”数据,并学习到一个高效、紧凑的数据表示 z。这个副产品——也就是编码器本身以及它学到的潜在表示 z——往往比重建任务本身更有价值。
AE代码讲解:
import torch
import torch.nn as nn
import torch.optim as optim
import torchvision
import torchvision.transforms as transforms
from torch.utils.data import DataLoader# 定义自编码器网络结构
class Autoencoder(nn.Module):def __init__(self):super(Autoencoder, self).__init__()# 编码器:将输入压缩到低维表示self.encoder = nn.Sequential(nn.Linear(784, 256), # MNIST图像展平后为784维nn.ReLU(),nn.Linear(256, 64),nn.ReLU(),nn.Linear(64, 16) # 压缩到16维特征)# 解码器:从低维表示重建原始输入self.decoder = nn.Sequential(nn.Linear(16, 64),nn.ReLU(),nn.Linear(64, 256),nn.ReLU(),nn.Linear(256, 784),nn.Sigmoid() # 输出值在0-1之间,与输入归一化范围匹配)def forward(self, x):encoded = self.encoder(x)decoded = self.decoder(encoded)return decoded# 准备MNIST数据集
transform = transforms.Compose([transforms.ToTensor(), # 转换为张量transforms.Normalize((0.5,), (0.5,)) # 归一化到[-1,1]
])train_dataset = torchvision.datasets.MNIST(root='./data', train=True,download=True,transform=transform
)train_loader = DataLoader(train_dataset,batch_size=128,shuffle=True
)# 初始化模型、损失函数和优化器
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
model = Autoencoder().to(device)
criterion = nn.MSELoss() # 使用均方误差作为重建损失
optimizer = optim.Adam(model.parameters(), lr=0.001)# 训练循环
num_epochs = 10
for epoch in range(num_epochs):for data in train_loader:img, _ = data # 忽略标签img = img.view(img.size(0), -1).to(device) # 展平图像 [128, 784]# 前向传播output = model(img)loss = criterion(output, img)# 反向传播和优化optimizer.zero_grad()loss.backward()optimizer.step()# 打印每个epoch的损失print(f'Epoch [{epoch+1}/{num_epochs}], Loss: {loss.item():.4f}')print("训练完成!")# 测试重建效果(示例)
test_img, _ = next(iter(train_loader))
test_img = test_img[0].view(1, -1).to(device)
with torch.no_grad():reconstructed = model(test_img)# 可视化对比原始图像和重建图像(需要matplotlib)
# import matplotlib.pyplot as plt
# original_img = test_img.view(28, 28).cpu().numpy()
# reconstructed_img = reconstructed.view(28, 28).cpu().numpy()
# plt.subplot(1, 2, 1)
# plt.imshow(original_img, cmap='gray')
# plt.title('Original')
# plt.subplot(1, 2, 2)
# plt.imshow(reconstructed_img, cmap='gray')
# plt.title('Reconstructed')
# plt.show()编码器:784 → 256 → 64 → 16(瓶颈层)
解码器:16 → 64 → 256 → 784(重建层)
使用ReLU激活函数(输出层用Sigmoid确保输出值在0-1之间)
MNIST图像被展平为784维向量
像素值归一化到[-1, 1]后,通过Sigmoid输出到[0,1]
使用均方误差(MSE)作为重建损失
Adam优化器学习率设为0.001
批量大小128,训练10个epoch
但是普通自编码器不会告诉我们:
1.隐空间的分布是什么样的
2.如何从“随机点”生成新的样本
普通AE只能重构已有数据,不能真正“生成”全新数据。
它的编码器将输入 x 映射到潜在空间中的一个确定的、唯一的点 z。如果你输入同一张猫的图片100次,你会得到100次完全相同的编码向量 z。
这个潜在空间可能是不连续的,充满了“空洞”。也就是说,在两个编码点之间随意取一个点,解码器可能无法生成任何有意义的东西,因为它在训练时从未见过那片区域。因此AE多用于数据的压缩和恢复,用于数据生成时效果并不理想。
为了解决这个问题,就有了 VAE。
VAE 不仅要学会压缩数据,还要学会“生成分布”,从而可以随机采样并生成全新的数据。
它的编码器输出的不是一个点,而是一个概率分布。
通常是一个高斯分布,由均值向量 μ 和标准差向量 σ 来定义。实际的编码 z 是从这个分布 N(μ,σ2) 中随机采样得到的。这意味着,你输入同一张猫的图片100次,会得到100个略有不同但都围绕着均值 μ 的编码向量 z。这种设计,加上一个特殊的损失项,强制让潜在空间变得连续、平滑。
变分自编码器VAE讲解:
VAE的结构和普通自编码器很像,但有关键区别:
输入x → 编码器(Encoder) → 隐变量z → 解码器(Decoder) → 输出x'
输入 x:真实数据,比如一张图片。
编码器 q(z|x):把输入x映射到隐空间的分布,而不是一个点。
输出均值 μ(x) 和 方差 σ²(x)。
表示:给定x,隐变量z服从 N(μ(x), σ²(x))。
这意味着编码器认为:“对于这个输入 x,它在潜在空间中的表示应该在以 μ 为中心、以 σ 为标准差的这个范围内。” 它给出了一个模糊的“区域”,而不是一个精确的“坐标”。
我们现在有了一个分布,下一步就是从这个分布中采样一个点 z 出来,送给解码器。但这里有个大问题:“随机采样”这个动作是不可微分的,这意味着我们无法用梯度下降来训练网络。
为了解决这个问题,VAE 的提出者们想出了一个非常聪明的数学技巧——重新参数化技巧。
它把采样过程变成了:z=μ+σ⋅ϵ:
μ 和 σ 是编码器网络计算出的确定性数值。
ϵ 是一个从标准的正态分布 N(0,1)(均值为0,标准差为1)中随机采样的噪声。
你看,通过这个变换,网络的输出(μ 和 σ)与随机性(ϵ)被分开了。梯度可以顺利地流过 μ 和 σ 进行学习,而随机性则作为一个外部输入注入。这个小小的技巧是让 VAE 能够被成功训练的关键。
采样 z:从这个高斯分布中随机采样一个z。
解码器 p(x|z):把z解码成一个重建的样本x'。
目标:让x'尽可能接近x,同时让隐变量z的分布接近一个标准正态分布 N(0,1)。
VAE数学核心(直观理解):
VAE的数学核心是 概率图模型:
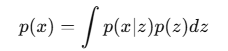
我们认为数据x是由一个潜在变量z生成的:
但直接计算这个积分非常难,潜在变量 z 虽然维度比原始数据 x 低,但它依然是一个高维向量(比如32维、64维甚至更高)。
现在,请你想象在一个100维的空间里做积分。这个空间的“体积”大到超乎想象,这就是所谓的“维度灾难” (Curse of Dimensionality)。
更糟糕的是,对于一个给定的数据 x,能够生成它的那些“有效”的 z 可能只分布在这个浩瀚空间里一个极其微小的区域内。
用数值方法(比如蒙特卡洛采样)去计算这个积分,就像是开着飞机在整个太平洋上空随机撒网,希望能捕到一条特定的鱼。
绝大多数的采样点 z 会落在 p(x∣z) 几乎为零的区域,对积分的贡献微乎其微,导致计算效率极低且结果不准确。
在 VAE 这样的模型里,p(x∣z) 是由一个深度神经网络(解码器)定义的。这是一个非常复杂、高度非线性的函数。我们根本无法得到这个积分的解析解 (analytical solution),也就是一个封闭形式的数学公式。
所以我们引入一个近似分布 q(z|x) 去估计真实的后验 p(z|x)。
这里可能大家会比较模糊,我展开讲解一下:
我们假设存在一个潜在变量 z,它决定了数据 x的生成过程。
p(z):隐变量的先验分布(通常是标准正态 N(0,1))
p(x∣z):给定 z,生成数据 x的条件分布(由解码器输出)
理论上,一张图片 x的真实概率可以写成:
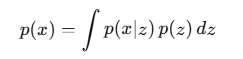
为什么我们要最大化数据似然?
我们有一个真实数据集 {x1,x2,… }
我们希望模型学到的分布 p(x) 能够尽可能贴近真实数据的分布。
最大化 logp(x)= 让“模型生成真实数据的概率”尽可能大
为什么需要近似分布 q(z∣x)?
上面讲了,P(X|Z)几乎无法直接计算出来。
我们引入一个可控的近似分布:
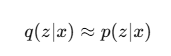
通过优化 q(z|x),我们尽可能让它逼近真实后验 p(z∣x)。
这就是变分的含义:用一个“可优化的分布”去近似一个不可计算的分布。
最大化数据的似然:
变分下界(ELBO):
通过数学推导,可以得到:
![]()
第一项:重构项:让生成的x'尽量接近真实x。
第二项:KL散度项:让编码器的隐空间分布q(z|x)接近先验分布p(z)(通常是标准正态N(0,1))。
训练流程与代码讲解:
第1步:输入数据
我们从训练数据集中随机抽取一小批 (a mini-batch) 真实的样本数据,我们称之为 x。比如,128张人脸图片。
第2步:通过编码器 (Encoder)
我们将这批数据 x 输入到编码器网络 qϕ(z∣x) 中。编码器进行一次前向传播,它的输出不是一个直接的编码 z,而是我们之前学过的,用来描述潜在空间中概率分布的两个参数:
1.均值向量 μ
2.对数方差向量 log(σ^2)
提示:在实际代码中,网络通常输出对数方差 log(σ^2) 而不是标准差 σ 本身。
这样做是为了保证方差 σ^2 永远是正数(因为任何数的平方都是正的,而 log(σ^2) 的取值范围是整个实数域,更便于网络学习),并且能增加训练的数值稳定性。
第3步:采样潜在向量 z (重新参数化技巧)
这是 VAE 的核心。我们不能直接从编码器定义的分布 N(μ,σ2) 中“硬”采样,因为那样梯度无法回传。所以我们使用重新参数化技巧:
首先,从一个标准正态分布 N(0,I) 中生成一个与 z 维度相同的随机噪声向量 ϵ。
然后,计算出潜在向量 z: z=μ+σ⋅ϵ (这里的 σ 可以通过 σ=exp(0.5⋅log(σ……2)) 计算得到)
我再次提醒一遍,这个重参数化非常重要!直接从 采样,z 对 μ、σ 没有显式可微关系,梯度无法回传;
重参数化把采样拆成“可微的线性变换 + 独立噪声”,从而让编码器参数可以被训练。
这样,我们就得到了一个既带有随机性、又与输入 x 相关(通过 μ 和 σ)的潜在编码 z。
第4步:通过解码器 (Decoder)
我们将刚刚采样得到的潜在向量 z 输入到解码器网络 pθ(x∣z) 中。解码器也进行一次前向传播,尽力将这个“压缩的精华” z 重建回原始数据的样子。它的输出是重建后的数据 x′。
第5步:计算总损失 (Total Loss)
现在我们手上有了所有需要的东西:原始输入 x,重建输出 x′,以及编码器产生的分布参数 μ 和 σ。我们可以计算 VAE 的总损失了,它由两部分组成:
![]()
重构损失 (Reconstruction Loss):
这个损失用来衡量原始输入 x 和重建输出 x′ 之间的差距。
如果输入是像 MNIST 那样的二值化图片,通常使用二元交叉熵 (Binary Cross-Entropy)。
如果输入是普通的彩色图片或者连续数值,通常使用均方误差 (Mean Squared Error, MSE)。
这个损失项会“逼迫”解码器学习如何生成逼真的图像,同时“逼迫”编码器提供足够有用的信息给解码器。
KL 散度损失 (KL Divergence Loss):
这个损失项像一个正则化器,它“规整”了潜在空间的结构,防止编码器为每个输入都分配一个相隔很远的“私人编码区”,从而使得整个潜在空间变得连续平滑。
总损失 = 重构损失 + KL 散度损失 (在实际应用中,KL散度项有时会乘上一个权重系数 β,即 β-VAE,用来调节它的影响力)
代码:
import torch
import torch.nn as nn
import torch.optim as optim
import torchvision
import torchvision.transforms as transforms
from torch.utils.data import DataLoader
import matplotlib.pyplot as plt
import numpy as np# 定义变分自编码器(VAE)模型
class VAE(nn.Module):def __init__(self, input_dim=784, hidden_dim=400, latent_dim=20):super(VAE, self).__init__()# 编码器部分self.encoder = nn.Sequential(nn.Linear(input_dim, hidden_dim),nn.ReLU(),nn.Linear(hidden_dim, hidden_dim),nn.ReLU())# 均值层self.fc_mu = nn.Linear(hidden_dim, latent_dim)# 对数方差层(使用对数方差确保方差为正)self.fc_logvar = nn.Linear(hidden_dim, latent_dim)# 解码器部分self.decoder = nn.Sequential(nn.Linear(latent_dim, hidden_dim),nn.ReLU(),nn.Linear(hidden_dim, hidden_dim),nn.ReLU(),nn.Linear(hidden_dim, input_dim),nn.Sigmoid() # 输出值在0-1之间)def reparameterize(self, mu, logvar):"""重参数化技巧:从潜在空间采样"""std = torch.exp(0.5 * logvar) # 计算标准差eps = torch.randn_like(std) # 从标准正态分布采样return mu + eps * std # 返回采样结果def forward(self, x):# 编码过程h = self.encoder(x)mu = self.fc_mu(h)logvar = self.fc_logvar(h)# 重参数化采样z = self.reparameterize(mu, logvar)# 解码重建x_recon = self.decoder(z)return x_recon, mu, logvar# 定义VAE损失函数(重建损失 + KL散度)
def vae_loss(recon_x, x, mu, logvar):# 重建损失(二元交叉熵或均方误差)BCE = nn.functional.binary_cross_entropy(recon_x, x, reduction='sum')# KL散度(衡量潜在分布与标准正态分布的差异)KLD = -0.5 * torch.sum(1 + logvar - mu.pow(2) - logvar.exp())return BCE + KLD# 准备MNIST数据集
transform = transforms.Compose([transforms.ToTensor(),transforms.Normalize((0.5,), (0.5,)) # 归一化到[-1,1]
])train_dataset = torchvision.datasets.MNIST(root='./data', train=True,download=True,transform=transform
)train_loader = DataLoader(train_dataset,batch_size=128,shuffle=True
)# 初始化模型、优化器
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
model = VAE().to(device)
optimizer = optim.Adam(model.parameters(), lr=1e-3)# 训练循环
num_epochs = 20
for epoch in range(num_epochs):total_loss = 0for batch_idx, (data, _) in enumerate(train_loader):data = data.view(data.size(0), -1).to(device) # 展平图像# 前向传播recon_batch, mu, logvar = model(data)# 计算损失loss = vae_loss(recon_batch, data, mu, logvar)# 反向传播和优化optimizer.zero_grad()loss.backward()optimizer.step()total_loss += loss.item()# 打印每个epoch的平均损失avg_loss = total_loss / len(train_loader.dataset)print(f'Epoch [{epoch+1}/{num_epochs}], Loss: {avg_loss:.4f}')print("训练完成!")# 可视化重建结果
def visualize_reconstruction():model.eval()with torch.no_grad():# 获取一批测试数据test_loader = DataLoader(train_dataset, batch_size=5, shuffle=True)data, _ = next(iter(test_loader))data = data.view(data.size(0), -1).to(device)# 重建图像recon, _, _ = model(data)# 转换为numpy数组用于绘图data = data.cpu().numpy()recon = recon.cpu().numpy()# 绘制原始图像和重建图像fig, axes = plt.subplots(2, 5, figsize=(10, 4))for i in range(5):axes[0, i].imshow(data[i].reshape(28, 28), cmap='gray')axes[0, i].axis('off')axes[1, i].imshow(recon[i].reshape(28, 28), cmap='gray')axes[1, i].axis('off')plt.show()# 可视化潜在空间
def visualize_latent_space():model.eval()with torch.no_grad():# 获取一批数据及其标签test_loader = DataLoader(train_dataset, batch_size=1000, shuffle=True)data, labels = next(iter(test_loader))data = data.view(data.size(0), -1).to(device)# 获取潜在表示h = model.encoder(data)mu = model.fc_mu(h)# 转换为numpy数组mu = mu.cpu().numpy()# 绘制潜在空间plt.figure(figsize=(10, 8))plt.scatter(mu[:, 0], mu[:, 1], c=labels, cmap='tab10', alpha=0.7)plt.colorbar()plt.title('VAE Latent Space')plt.xlabel('z-dim 1')plt.ylabel('z-dim 2')plt.show()# 生成新样本
def generate_samples():model.eval()with torch.no_grad():# 从标准正态分布采样z = torch.randn(64, 20).to(device)# 通过解码器生成样本samples = model.decoder(z).cpu()# 绘制生成样本fig, axes = plt.subplots(8, 8, figsize=(10, 10))for i, ax in enumerate(axes.flatten()):ax.imshow(samples[i].view(28, 28), cmap='gray')ax.axis('off')plt.show()# 执行可视化
visualize_reconstruction()
visualize_latent_space()
generate_samples()self.encoder: 编码器。它由一系列全连接层 (nn.Linear) 和 ReLU 激活函数组成。它的任务是将输入的 28×28=784 维的扁平化图像,一步步压缩,最后输出一个hidden_dim(这里是400)维的特征向量。self.fc_mu和self.fc_logvar: 这是 VAE 的关键。编码器提取的400维特征向量并不是直接的潜在编码 z。而是兵分两路,分别通过这两个独立的全连接层,生成潜在分布的两个参数:均值 μ 和对数方差 log(σ2)。它们的维度都是latent_dim(这里是20)。self.decoder: 解码器。它的结构与编码器大致相反,像一个镜像。它的任务是接收一个latent_dim(20维)的潜在向量 z,然后一步步将其“放大”和“解码”,最终重建回input_dim(784维)的图像。nn.Sigmoid(): 解码器的最后一层使用了 Sigmoid 激活函数。这是为什么呢? 因为 MNIST 图像的像素值经过ToTensor()处理后,范围在 [0,1] 之间。Sigmoid 函数的输出范围恰好也是 [0,1],这使得重建出的图像像素值能与原始图像在同一尺度上进行比较,非常适合使用二元交叉熵损失函数。
class VAE(nn.Module):def __init__(self, input_dim=784, hidden_dim=400, latent_dim=20):...
input_dim=784:MNIST图片28x28 → 展平为784维
hidden_dim=400:隐藏层维度
latent_dim=20:潜在空间维度(z的维数)
self.encoder = nn.Sequential(nn.Linear(input_dim, hidden_dim),nn.ReLU(),nn.Linear(hidden_dim, hidden_dim),nn.ReLU()
)
输入784 → 两层全连接隐藏层(ReLU激活) → 输出隐藏特征h
self.fc_mu = nn.Linear(hidden_dim, latent_dim)
self.fc_logvar = nn.Linear(hidden_dim, latent_dim)
编码器输出隐藏特征h后,分别映射出均值 μ 和 对数方差 logσ²。
使用log方差是为了确保方差永远为正(exp后自动正数)。
self.decoder = nn.Sequential(nn.Linear(latent_dim, hidden_dim),nn.ReLU(),nn.Linear(hidden_dim, hidden_dim),nn.ReLU(),nn.Linear(hidden_dim, input_dim),nn.Sigmoid()
)
输入z(20维) → 两层隐藏层 → 输出784维图像
最后一层用
Sigmoid让像素值范围在[0,1]。
重参数化技巧
def reparameterize(self, mu, logvar):std = torch.exp(0.5 * logvar) # 标准差 σeps = torch.randn_like(std) # 从 N(0,1) 采样return mu + eps * std # z = μ + σ·ε
std = torch.exp(0.5 * logvar): 从对数方差 log(σ2) 计算出标准差 σ。
eps = torch.randn_like(std): 从标准正态分布(均值为0,方差为1)中采样一个噪声 ϵ,其形状与 std 完全相同。
return mu + eps * std: 实现了公式 z=μ+ϵ⋅σ。这样,梯度就可以通过 μ 和 σ 正常反向传播,而随机性则由 ϵ 引入。
def forward(self, x):h = self.encoder(x)mu = self.fc_mu(h)logvar = self.fc_logvar(h)z = self.reparameterize(mu, logvar)x_recon = self.decoder(z)return x_recon, mu, logvar
流程:
输入x(展平图像)
编码器 → 输出隐藏h
计算 μ 和 logσ²
重参数化采样 z
解码器重建 x'
损失函数
def vae_loss(recon_x, x, mu, logvar):BCE = nn.functional.binary_cross_entropy(recon_x, x, reduction='sum')KLD = -0.5 * torch.sum(1 + logvar - mu.pow(2) - logvar.exp())return BCE + KLD
VAE的目标 = 重建误差 + KL散度
BCE:重建误差
这里用二元交叉熵(Binary Cross Entropy)
衡量重建图像和原图的像素差
KLD:KL散度
衡量 q(z|x) 和 p(z)(标准正态)之间的差异
保证隐变量分布接近 N(0,1),便于生成。
transform = transforms.Compose([transforms.ToTensor(),transforms.Normalize((0.5,), (0.5,))
])
train_dataset = torchvision.datasets.MNIST(root='./data', train=True, download=True, transform=transform
)
train_loader = DataLoader(train_dataset, batch_size=128, shuffle=True)
MNIST:28×28灰度手写数字数据集
ToTensor:把图片转为[0,1]的张量Normalize:标准化到[-1,1](可加速训练)DataLoader:每次取128张图,打乱顺序
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
model = VAE().to(device)
optimizer = optim.Adam(model.parameters(), lr=1e-3)
num_epochs = 20
for epoch in range(num_epochs):total_loss = 0for batch_idx, (data, _) in enumerate(train_loader):data = data.view(data.size(0), -1).to(device) # 展平成784维recon_batch, mu, logvar = model(data) # 前向传播loss = vae_loss(recon_batch, data, mu, logvar)# 损失optimizer.zero_grad()loss.backward() # 反向传播optimizer.step() # 更新参数total_loss += loss.item()avg_loss = total_loss / len(train_loader.dataset)print(f'Epoch [{epoch+1}/{num_epochs}], Loss: {avg_loss:.4f}')
训练20轮:
每个Batch:
展平图像 → 前向计算 → 损失
清空梯度 → 反向传播 → 优化参数
打印每轮的平均损失
data = data.view(data.size(0), -1).to(device): 从 DataLoader 取出一批数据,并将其从 [128, 1, 28, 28] 的形状展平为 [128, 784],以匹配我们全连接层的输入。
recon_batch, mu, logvar = model(data): 执行一次完整的前向传播。
loss = vae_loss(...): 计算总损失。
optimizer.zero_grad(): 梯度清零。PyTorch 的梯度是累加的,所以在每次反向传播前必须手动清零。
loss.backward(): 反向传播。计算损失函数关于模型所有参数的梯度。
optimizer.step(): 参数更新。优化器根据刚刚计算出的梯度,对模型参数进行一次更新。
输入图像 x↓ Encoder
输出 μ, logσ²↓ Reparameterization
采样 z = μ + σ·ε↓ Decoder
重建图像 x'↓ Loss
BCE(x,x') + KL(q(z|x)||N(0,1))
可视化函数:
这部分用于评估我们训练好的模型。
model.eval(): 将模型切换到评估模式。这会关闭一些只在训练时使用的层,如 Dropout。with torch.no_grad(): 在这个代码块中,禁用梯度计算。这会节省内存并加速计算,因为在评估时我们不需要更新模型。visualize_reconstruction(): 展示模型重建图像的能力。visualize_latent_space(): 将高维(20维)的潜在空间中的前两维 (mu[:, 0],mu[:, 1]) 绘制出来,并用颜色表示数字的类别。我们可以观察到,训练好的 VAE 会将相同类别的数字在潜在空间中聚集在一起。generate_samples(): 展示模型的生成能力。我们从标准正态分布中随机采样一些点 z,然后只通过解码器,就能生成全新的、从未在数据集中出现过的数字图像。
变分自编码器 VAE 是一个里程碑式的模型。它巧妙地将神经网络的强大拟合能力与贝叶斯推断的概率思想结合起来,不仅能学习数据的有效表示,更重要的是打开了深度生成模型的大门。它通过概率编码和 KL 散度约束,构建了一个规整而连续的“灵感空间”,让我们能够真正地从无到有,创造出全新的数据。