反馈循环的跨领域智慧:从控制工程到Pix2Pix
目录
1 核心思想:共通的反馈循环
1.1 控制工程中的反馈调节
1.2 Pix2Pix中的对抗博弈
2 工作机制的直观对比
3 Pix2Pix的独特之处:对抗性博弈与动态目标
3.1 动态的博弈目标
3.2 “创造”而非单纯“还原”
4 Pix2Pix的巧妙组合:L1 Loss 的引入
5 总结:共通的哲学与不同的演变
看似迥异的领域,却共享着同一套智慧内核。
在人工智能的图像领域,Pix2Pix 模型能将草图转化为逼真的照片,或将白天的街景变为夜景。而在控制工程中,一个恒温系统能自动将室温维持在设定的温度。这两者看似风马牛不相及,但其底层的工作原理,却闪耀着同样迷人的思想光芒:通过“比较差异并据此调整”的循环机制来逐步逼近目标。
本文将带你深入探索这两个领域的奇妙联系与区别,理解反馈循环这一强大思想如何在不同的世界中塑造智能。
1 核心思想:共通的反馈循环
无论是Pix2Pix还是控制工程中的反馈调节,其精髓都在于形成一个闭环系统。在这个系统中,输出结果会被不断地与目标进行比对,并根据比较产生的“误差”信号来调整自身的行为,从而逐步缩小与目标的差距。
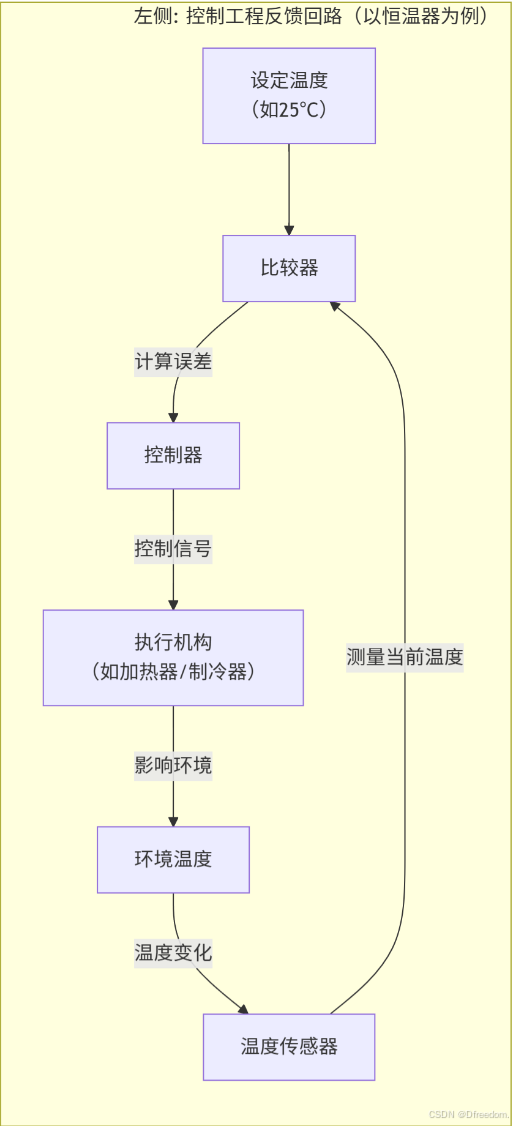
1.1 控制工程中的反馈调节
在控制工程中,这是经典的负反馈闭环控制。想象一下调节室温的过程:
-
设定目标:你希望房间温度保持在舒适的25℃(这是设定值)。
-
测量比较:温度传感器(测量装置)持续测量当前室温(输出),并将其与设定值比较,计算出误差(温差)。
-
计算调整:控制器(如温控器)根据误差信号,按照特定算法(如PID)计算出调整指令,驱动执行器(如空调压缩机或加热器)工作。
-
闭环循环:这个过程不断重复,直到室温稳定在25℃,误差趋近于零。
其最大优点是能够自动抑制干扰(如开门导致冷空气进入),维持系统的稳定。
1.2 Pix2Pix中的对抗博弈
Pix2Pix是基于条件生成对抗网络(cGAN)的图像转换模型。它的工作流程也构成了一个精巧的闭环:
-
设定目标:生成器(Generator)的目标是生成一张无法被判别器(Discriminator)识别的“假”图像,且其内容需符合输入条件(如将语义分割图转换为真实照片)。
-
测量比较:判别器充当了“传感器”和“比较器”的角色。它同时接收真实图像和生成器产生的图像,并输出一个概率值(误差信号),判断输入图像为真的可能性。
-
计算调整:生成器根据判别器提供的这个对抗损失(误差信号),通过反向传播算法调整其内部参数,学习如何生成更逼真的图像来“欺骗”判别器。
-
闭环循环:生成器和判别器在动态博弈中不断进化,直到生成器能产生高度逼真的图像,而判别器无法有效区分(其判断真伪的准确率接近50%)。
2 工作机制的直观对比
为了更清晰地理解它们的对应关系,下表梳理了关键组件和信号的类比:
| 反馈调节系统 (控制工程) | Pix2Pix (cGAN) | 核心类比 |
|---|---|---|
| 控制器 (Controller) | 生成器 (Generator) | 两者都根据接收到的误差信号来调整其输出,试图使系统输出接近目标值。 |
| 执行器 (Actuator) | (通常隐含在生成器中) | 将控制信号转换为具体的物理动作或生成具体的数据样本。 |
| 传感器/比较器 (Sensor) | 判别器 (Discriminator) | 负责测量当前输出,并将其与目标值(或真实数据分布)进行比较,产生一个衡量“误差”或“差异”的信号。 |
| 误差信号 (Error Signal) | 对抗损失 (Adversarial Loss) | 这是连接两个系统的核心纽带。它量化了当前状态与理想状态之间的差距,并驱动控制器/生成器进行修正。 |
| 设定值 (Setpoint) | 真实数据分布 + 输入条件 | 系统希望达到的目标或理想状态。 |
| 外部干扰 (Disturbance) | 输入条件的变化(如不同的草图) | 系统需要克服或适应的影响因素,以产生正确的输出。 |
🔄 图1:反馈循环对比示意图
3 Pix2Pix的独特之处:对抗性博弈与动态目标
尽管核心思想相通,但Pix2Pix的实现机制有其独特且精妙之处,这主要源于其生成对抗网络(GAN)的根基。
3.1 动态的博弈目标
在传统控制系统中,目标(设定值)通常是固定不变的(如25℃)。但在Pix2Pix中,判别器自身也在不断学习和进化。它不再满足于识别最初的“假图”,而是会不断提升自己的鉴别能力。
这意味着生成器要应对的是一个不断移动的目标和一个越来越“挑剔”的裁判。这种对抗性博弈是GAN的核心动力,它使得两者的能力在竞争中共同提升,最终达到一种纳什均衡的理想状态。
3.2 “创造”而非单纯“还原”
传统反馈控制大多致力于让系统输出稳定地还原到一个预设的、已知的目标状态。Pix2Pix的生成器则是在学习一种从输入到输出的复杂映射关系(如语义图→照片,轮廓→实物),其目标是创造出符合条件且细节丰富、逼真的新内容,而非还原某个特定的、唯一的数值。
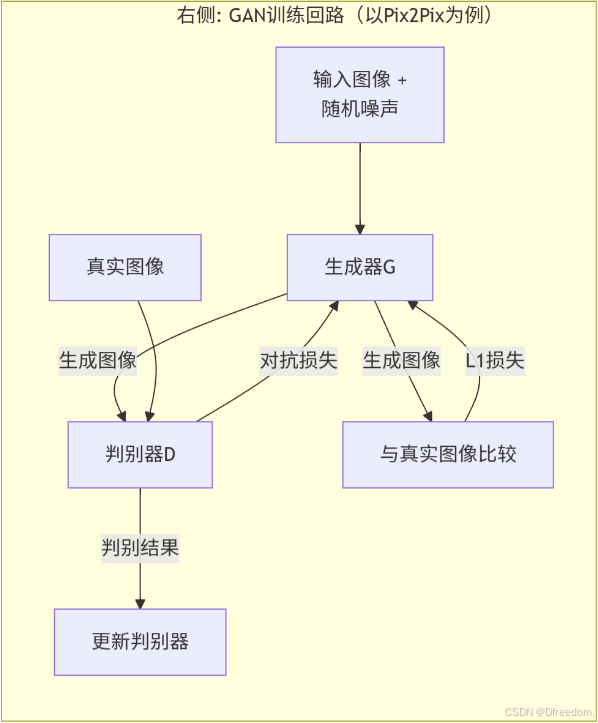
4 Pix2Pix的巧妙组合:L1 Loss 的引入
单纯的GAN训练有时不稳定,可能导致生成图像虽然整体逼真但偏离输入条件(如轮廓结构)。Pix2Pix论文的作者采用了一个巧妙的解决方案:在GAN的对抗损失基础上,额外增加一个基于L1距离的重建损失(L1 Loss)。
-
L1 Loss:计算生成图像与真实目标图像之间像素级的绝对差异。它直接惩罚生成结果与真实图像在像素上的偏差,能有效保证生成图像与目标图像在颜色、整体轮廓等低频信息上保持一致。
这种组合可以理解为:
-
对抗损失(来自判别器):引导生成高频细节,提升纹理、清晰度和真实感,解决“像不像一张真实的图片”的问题。
-
L1 损失(直接比较像素):保住低频结构,确保内容正确和全局一致性,解决“是不是目标要求的内容”的问题。
这就像一位艺术家(生成器)在创作时,既有一位艺术评论家(判别器)从整体艺术感上点评,又有一位工程师拿着原始蓝图(L1 Loss)核对基本结构。两者结合,才能创作出既美观又符合要求的作品。
🎨 图2:Pix2Pix训练目标分解示意图

5 总结:共通的哲学与不同的演变
Pix2Pix与控制工程中的反馈调节,在思想层面达成了高度的统一。它们都完美体现了反馈循环这一控制论的核心哲学:利用差异信息进行自我优化和调整,最终达到目标。
然而,它们的差异则体现了同一思想在不同领域(连续物理信号控制 vs. 离散数据分布学习)为解决各自独特问题所做的适应性演变:
| 特性 | Pix2Pix (cGAN) | 控制工程反馈调节 | 对比总结 |
|---|---|---|---|
| 核心思想 | 通过生成器与判别器的对抗博弈,不断逼近真实数据分布 | 通过检测输出与目标的偏差,反向调节系统输入以消除误差 | 均基于"检测偏差、利用偏差修正" |
| 系统目标 | 生成逼真且符合条件的新数据 | 使系统输出稳定还原到预设的设定值 | "创造" vs "还原" |
| 目标性质 | 动态变化(判别器不断进化) | 固定不变(设定值恒定) | 最根本的区别 |
| 应用领域 | 图像转换、风格迁移等计算机视觉任务 | 工业自动化、航空航天等物理系统控制 | 虚拟世界 vs 物理世界 |
所以说,你觉得它们相似,是因为洞察到了背后共通的控制论智慧。而它们的差异,则是工程艺术与数据魔法在各自舞台上奏响的不同乐章。理解这种深层的联系,不仅能帮助我们更好地领悟人工智能的运作原理,也能为跨领域的创新提供宝贵的灵感源泉。