Hello Robot Stretch 3 技术解析(上):极简结构与全身力感知如何加速科研?
在具身智能与移动操作(Mobile Manipulation)研究中,研究者常面临一个现实困境:传统机器人平台要么过于复杂昂贵,部署困难;要么功能受限,难以支持前沿算法验证。
Hello Robot 具身智能平台Stretch 3移动操作机器人的出现,提供了一种新的解决思路——它不追求成为“全能”机器人,
而是通过一系列精心设计的权衡,成为一个“足够好”的研究加速器。
Hello Robot具身智能移动操作机器人Stretch 3:开源、灵巧、友好
Stretch 3移动操作机器人的优势不来自单一技术的突破,而是一系列围绕“科研可用性”的系统性设计。
从结构精简到力感知创新,从开源架构到真实场景适配,每一环都指向同一个目标:让研究者更快地在真实环境中验证想法。以下是其“核心能力”的完整图景。
一、精妙权衡:为研究效率而优化的结构设计
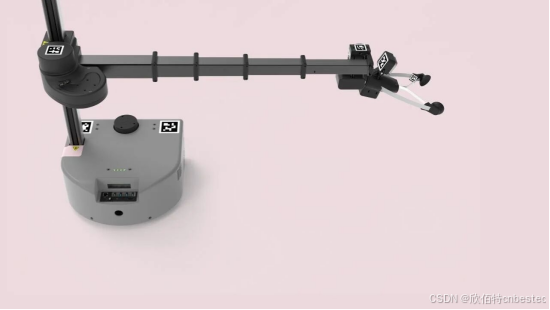
Hello Robot移动操作机器人Stretch 3的核心价值体现在其工程上的精准Trade-offs(权衡)。它采用两轮差速底盘 + 垂直升降臂 + 水平伸缩臂的极简结构,仅用4个主关节即可实现末端执行器在三维空间中的笛卡尔运动,显著降低了机械复杂度与制造成本。
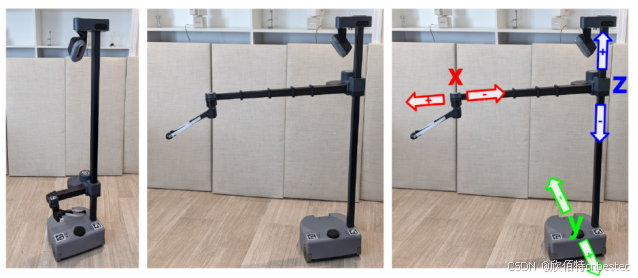
Hello Robot Strech 3简约灵活的设计实现笛卡尔运动
二、全域触觉感知:基于低减速比的力反馈设计
移动操作机器人Stretch 3的力感知不依赖昂贵的扭矩传感器,而是通过系统设计本身实现——利用其低齿轮比传动器(Low-Gear-Ratio Actuators)的物理特性,体现了其“以系统设计替代复杂硬件”的核心理念。
它的低减速比使电机电流与输出力矩高度线性相关;因此,仅需通过实时监测四个主关节的电流(无需额外安装扭矩传感器),即可高精度估算机械臂各部位的接触力。
此外,手腕内置高灵敏度三轴加速度计,可检测轻微碰撞与振动,增强环境感知能力。
核心优势:
- 低成本高可靠:省去多个高精度传感器,降低硬件成本与故障点;
- 全域感知能力:电流信号反映整每个力链的负载变化,使机械臂主要活动关节的接触(如臂身碰撞)均可被检测;
- 开发更简单:通过 move_until_contact 等高级API,轻松实现“盲操作”(如伸臂触碰后拉抽屉),无需深入力控底层。
Hello Robot 移动操作机器人Strech3 力感知自主开启多种抽屉
这不是妥协,而是将机械、驱动与感知深度融合的设计智慧——用最基础的信号,实现真实的物理交互。
还没结束:真正的“研究加速器”才刚刚登场
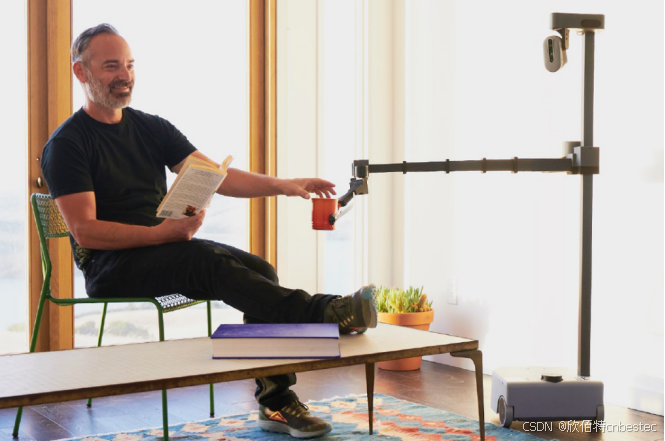
Hello Robot Stretch 3 通过极简可靠的机械设计和创新的力感知方案,大幅降低了移动操作机器人在真实环境中部署的门槛。它不追求炫技式的复杂配置,而是专注于解决科研中最实际的问题:如何让机器人更快地动起来,让研究者更专注地投入算法与实验本身?
从结构精简到全身触觉感知,Stretch 3 的每一步设计都在为“快速验证”服务——无论是抓取未知物体、与家具交互,还是在家庭环境中自主导航,它都能以稳定、可复现的方式支持研究者快速迭代想法。
而这,只是它作为“科研加速器”的前半部分答案。
在下一篇文章中,我们将深入探讨它的全栈开源架构、高效部署能力以及在真实家庭场景中的运行表现。这些能力如何共同支撑从实验室原型到实际应用的跨越?敬请期待下一期,我们揭晓后续三大核心优势。
【版权声明】
本文部分技术内容及数据援引自论文《The Design of Stretch: A Compact, Lightweight Mobile Manipulator for Indoor Human Environments》,发表于IEEE ICRA 2022。
项目主页:https://github.com/hello-robot
如需转载,请完整保留本声明并注明原始出处。
✅ 感谢论文的核心贡献者:
Charles C. Kemp(查尔斯·坎普)
Aaron Edsinger(亚伦·埃德辛格)
Henry M. Clever(亨利·克莱弗)
Blaine Matulevich(布莱恩·马图列维奇)
欢迎关注 “欣佰特科技” ,持续为大家分享 “具身智能领域”前沿技术及应用!