HUD-汽车图标内容
目录
一、ACC 自适应巡航控制
1.1 是什么?
1.2. 核心功能与工作原理
1.3 ACC 的进阶形态:全速域自适应巡航
1.4 使用场景与限制
二、LKA( Lane Keeping Assist)车道保持辅助
2.1 它是什么?
2. 2 核心功能与工作原理
2.3 容易混淆的概念:LKA 与 LDW 和 LCC
2.4 使用场景与限制
三、总结与对比
四、HWA(highway-Assist)高速公路辅助
4.1 自动变道辅助-HWA最核心的“变动”功能
4.2 智能跟车与车道居中
4.3 HWA 在自动驾驶等级中的位置
4.4 HWA 与其它常见系统的区别
使用 HWA 的重要注意事项
五、AEB(Autonomous Emergency Braking)-自动紧急制动
5.1 是什么?
5.2 核心工作原理
5.3 AEB 主要功能类型
5.4 AEB 的重要性
5.5 使用 AEB 的重要注意事项(局限性)
六、FCTA(Front Cross Traffic Alert)前方横向来车预警
6.1 它是什么?
6.2 它如何工作?
6.3 主要使用场景
6.4 与类似功能的区别
七、FCTB(Front Cross Traffic Brake)-前方横向来车制动
八、FCW(Forward Collision Warning)-前方碰撞预警
8.1 核心功能
8.2 流程演示
九、DOW (Door Open Warning)- 开门预警系统
9.1 它是什么?
9.2 它如何工作?
感知阶段:
判断与预警阶段:
警报形式:
9.3 DOW 与其他系统的关联
9.4 重要注意事项
十、RCTB(Rear Cross Traffic Brake) - 后方横向来车制动系统
十一、ELK(Emergency Lane Keeping)- 紧急车道保持
11.1 ELK是什么?
11.2 ELK 与普通 LKA 的核心区别
一、ACC 自适应巡航控制
1.1 是什么?
ACC是一个智能化的巡航控制系统。它通过车头的雷达或摄像头,探测前方车辆,自动控制车速和车距,实现跟车行驶。
1.2. 核心功能与工作原理
设定速度:您设定一个期望的最高巡航速度(例如 100 km/h)。
设定车距:您设定与前方车辆希望保持的距离(通常有1-4档可选)。
-
智能跟车:
-
前方无车时:车辆会按照您设定的速度(100 km/h)匀速行驶,就像定速巡航一样。
-
前方有慢车时:系统检测到前方有车速更慢的车辆(例如 80 km/h),会自动减速,并保持您设定的安全距离,跟随前车。
-
前车加速或变道离开时:系统会自动加速,直到恢复到您设定的最高速度(100 km/h)。
-
前车减速或刹车时:系统会自动减速,甚至刹停。
-
1.3 ACC 的进阶形态:全速域自适应巡航
早期的 ACC 有最低工作速度限制(如 30 km/h),一旦低于这个速度就会解除。而现在的全速域 ACC 实现了:
-
跟停:在拥堵路况下,可以跟随前车直至完全停止。
-
跟走:车辆停止后,如果前车在短时间内(通常是 3 秒内)重新启动,ACC 会自动跟随起步。如果停车时间较长,通常需要驾驶员轻踩油门或按一下按键来重新激活。
1.4 使用场景与限制
-
主要场景:高速公路、城市快速路、高架桥等路况较好的封闭道路。在长途驾驶和拥堵跟车时,能极大缓解驾驶疲劳。
-
局限性:
-
识别静态障碍物(如路障、事故车、蹲着的人)的能力较弱。
-
在急弯道时,雷达可能无法有效探测到前方车辆。
-
它只是一个辅助系统,不能替代驾驶员观察和刹车!
-
二、LKA( Lane Keeping Assist)车道保持辅助
2.1 它是什么?
LKA 通过前挡风玻璃上的摄像头识别车道线,自动微调方向盘,帮助车辆保持在车道中央行驶。
2. 2 核心功能与工作原理
-
识别车道:摄像头实时扫描车辆前方的车道线(白色或黄色)。
-
纠偏干预:
-
当系统发现车辆即将无意识偏离车道时(例如压到车道线),会对方向盘施加一个轻微的纠正力矩,或者通过振动方向盘、发出警报来提醒驾驶员。
-
请注意,LKA 是“辅助”,它不是一直持续控制方向盘,而是在“快要偏离时才干预”。
-
2.3 容易混淆的概念:LKA 与 LDW 和 LCC
为了更好地理解 LKA,需要区分另外两个术语:
-
LDW - 车道偏离预警:
-
只有警告,没有动作。当车辆无意识压线时,系统只会通过声音、图标闪烁或方向盘振动来提醒驾驶员,但不会主动纠正方向。
-
-
LCC - 车道居中保持:
-
这是 LKA 的进阶和增强版。
-
它不是等到快压线了才干预,而是持续地、主动地对方向盘进行微调,使车辆始终稳定在车道正中央行驶。
-
它的控制感更平滑、更连续,大大减少了车辆的“画龙”现象。
-
关系:我们通常所说的 LKA,在很多新车型上实际已经升级为了 LCC 功能。
-
2.4 使用场景与限制
-
主要场景:车道线清晰的高速公路和城市快速路。
-
局限性:
-
在车道线模糊、磨损、被积雪或泥土覆盖的路段会失效。
-
在急弯道上,系统能力有限。
-
遇到施工区、复杂路口时,系统无法处理。
-
驾驶员必须始终手握方向盘,否则系统会报警并退出。
-
三、总结与对比
| 特性 | ACC(自适应巡航) | LKA(车道保持辅助) |
|---|---|---|
| 控制维度 | 纵向控制(油门/刹车) | 横向控制(方向盘) |
| 核心功能 | 跟车、控速、保持车距 | 防止无意识偏离车道,保持车辆在车道内 |
| 传感器 | 雷达、摄像头 | 摄像头 |
| 驾驶员角色 | 无需控制油门和刹车 | 必须手握方向盘,准备接管 |
| 好比 | 您的右脚,帮您踩油门和刹车 | 您的左手,帮您微调方向,防止跑偏 |
四、HWA(highway-Assist)高速公路辅助
HWA是在ACC自适应巡航和LKA车道保持辅助基础上,功能更强大的一个组合系统。加了更智能、更拟人化的功能,主要体现在:
4.1 自动变道辅助-HWA最核心的“变动”功能
-
如何工作:开启HWA后,拨动转向灯杆(向左或向右),系统会:
-
智能判断:通过雷达和摄像头,自动检测相邻车道是否安全、有足够的空间变道。
-
自动执行:如果条件允许,系统会自动控制方向盘,平稳地将车辆驶入相邻车道。
-
完成变道:变道完成后,车辆会继续在新的车道上沿车道中心行驶,并恢复之前的ACC跟车状态。
-
图示:

-
-
意义:这大大减少了驾驶员在长途高速驾驶中的操作负担,更接近“自动驾驶”的体验。
4.2 智能跟车与车道居中
-
HWA系统在处理大曲率弯道时,表现通常比基础的LKA更稳定、更平滑。
-
在面对缓慢前车时,系统可能会在条件允许时,提示或自动执行变道超车(部分高级HWA具备此功能)。
4.3 HWA 在自动驾驶等级中的位置
根据国际通用的SAE自动驾驶等级标准(L0-L5),HWA属于 L2+(或称为L2.5)级别 的自动驾驶。
-
L2:系统同时控制纵向(油门/刹车-ACC)和横向(方向盘-LKA)运动,但驾驶员必须全程监控环境并随时准备接管。
-
L2+ (HWA):在L2的基础上,增加了特定场景下的自动变道等更高级的功能,自动化程度更高。
4.4 HWA 与其它常见系统的区别
| 功能系统 | 控制车速/车距 (纵向) | 保持在车道内 (横向) | 自动变道 | 等级 |
|---|---|---|---|---|
| ACC | ✅ | ❌ | ❌ | L1 |
| LKA | ❌ | ✅ | ❌ | L1 |
| ACC + LKA | ✅ | ✅ | ❌ | L2 |
| HWA(高速公路辅助) | ✅ | ✅ | ✅(核心) | L2+ |
| FSD/NOA(更高级系统) | ✅ | ✅ | ✅(+自动导航上下匝道等) | L2+ ~ L3雏形 |
注意:像特斯拉的FSD(完全自动驾驶能力)、小鹏的NGP(导航辅助驾驶)、蔚来的NOP(领航辅助)等,可以看作是HWA的进一步升级,它们增加了根据导航路线自动进出匝道、自动超越慢车等更复杂的功能。
4.5 使用 HWA 的重要注意事项
-
它不是自动驾驶:HWA是高级驾驶辅助系统,驾驶员必须始终保持手握方向盘,并观察路况,随时准备接管。
-
有使用条件限制:通常只在封闭的高速公路或城市快速路上工作。在普通城市道路、路口、恶劣天气(大雨、大雪影响传感器)下可能无法启用或会自动退出。
-
需要驾驶员主动激活变道:大部分HWA系统需要驾驶员拨动转向灯杆来“授权”变道,系统本身不会“随意”自动变道。
-
熟悉您的车辆:不同品牌(如奔驰、宝马、小鹏、理想等)的HWA具体表现和操作方式可能有细微差别,请务必阅读车辆手册,并在安全环境下熟悉其特性。
五、AEB(Autonomous Emergency Braking)-自动紧急制动
图示:![]()
5.1 是什么?
AEB是一个在危机情况下能代替或帮助驾驶员主动刹车的安全系统。
5.2 核心工作原理
-
感知:通过车辆前方的雷达、摄像头或两者的融合系统,持续不断地探测与前方车辆、行人或其他障碍物的距离和相对速度。
-
判断:车载电脑会实时分析这些数据。如果系统判断出即将发生碰撞,而驾驶员没有采取任何制动措施,或者制动力度不足时,它就会被触发。
-
执行:
-
第一阶段:发出警报。通过声音、视觉或触觉(如方向盘震动)方式向驾驶员发出紧急警告。
-
第二阶段:自动全力刹车。如果驾驶员仍未反应,系统会绕过驾驶员,自动对车辆进行全力制动,以避免碰撞或最大限度地减轻碰撞的严重程度。
-
5.3 AEB 主要功能类型
随着技术的发展,AEB 的功能也越来越强大,通常包括以下几种类型:
-
C2C AEB:车辆对车辆。针对前方行驶或静止的汽车。这是最基本和最常见的功能。
-
VRU AEB:弱势道路使用者。这是更高级的功能,专门针对:
-
行人检测
-
骑行者检测
-
-
AEB 交叉路口辅助:在车辆穿过十字路口时,检测侧向穿行的车辆并实施制动。
-
倒车 AEB:在倒车时检测后方的障碍物并自动刹车。
5.4 AEB 的重要性
AEB 被全球汽车安全评测机构(如中国的 C-NCAP、中保研,欧洲的 E-NCAP)视为核心安全指标,其重要性体现在:
-
减少追尾事故:这是 AEB 最显著的作用,能极大降低追尾事故。
-
保护弱势群体:带有行人检测的 AEB 可以有效降低车外行人和骑行者的伤亡风险。
5.5 使用 AEB 的重要注意事项(局限性)
尽管 AEB 非常强大,但它绝不能被视为“万能保险”或替代驾驶员的注意力。必须清楚其局限性:
-
它不是自动驾驶:AEB 是一个安全备份系统,设计初衷是处理紧急情况,而不是用于日常驾驶。
六、FCTA(Front Cross Traffic Alert)前方横向来车预警
6.1 它是什么?
FCTA 是一个在交叉路口使用的安全辅助系统。当驾车通过没有交通信号灯的前方交叉路口时,如果您的视线被两侧的建筑物、树木或停放的车辆等遮挡(形成视觉盲区),该系统可以探测到从侧向(左前方或右前方)接近的车辆,并发出警告。
6.2 它如何工作?
-
传感器:该系统通常利用车辆前部的雷达传感器和广角摄像头,对车辆左前方和右前方的大范围区域进行扫描。
-
探测与判断:系统会持续监测从侧向横穿您行驶路径的车辆。
-
预警:当系统判断侧向来车有与您发生碰撞的风险时,它会通过声音警报、视觉图标(通常在仪表盘或抬头显示上),有时还会配合方向盘震动来提醒。
6.3 主要使用场景
-
无红绿灯的十字路口或T型路口;当视线因障碍物而受阻,存在“鬼探头”风险时。
-
车辆从辅路驶入主路时。
6.4 与类似功能的区别
很多人熟悉 RCTA,它们原理相似但应用场景不同:
-
RCTA:后方横向来车预警。
-
场景:在倒车驶出停车位时,监测车辆后侧方是否有来车(如行人、自行车、汽车);在正常行驶通过前方交叉路口时,监测从侧向横穿的车辆。
-
FCTA:前方交叉路口预警。
-
总结来说,FCTA 是一项旨在提升交叉路口通行安全性的主动安全技术,它能有效弥补驾驶员的前向视觉盲区,预防侧向碰撞事故的发生。
七、FCTB(Front Cross Traffic Brake)-前方横向来车制动
FCTB 解决的正是被称为“鬼探头”的最危险驾驶场景之一。在这种场景下,驾驶员的反应时间极短,FCTB 的自动制动功能可以弥补人类的反应延迟,成为避免事故的最后一道坚固防线。
八、FCW(Forward Collision Warning)-前方碰撞预警
8.1 核心功能
FCW系统通过车辆前部的雷达和/或摄像头,持续监测与前车的距离和相对速度。当系统判断有追尾碰撞的高风险,而驾驶员没有采取任何措施时,它就会触发 “FCW报警”。
8.2 流程演示
配备了FCW和AEB的车辆,在遇到紧急情况时的典型反应是:
FCW报警(提醒驾驶员) → 如果驾驶员未制动 → AEB系统介入自动紧急刹车。所以,FCW是AEB系统的前半部分,专门负责预警。
九、DOW (Door Open Warning)- 开门预警系统
9.1 它是什么?
DOW 系统旨在解决一个非常常见且危险的情景—— “开门杀”。当车辆停靠在路边,驾乘人员准备打开车门时,DOW 系统会持续监测车辆侧后方是否有接近的车辆、行人或骑行者。如果系统判断开门动作会与后方来物发生碰撞,它会立即向驾乘人员发出警告,提示暂缓开门。如下图所示: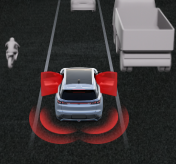
9.2 它如何工作?
-
感知阶段:
-
车辆处于停车状态(或刚熄火),但尚未锁车。
-
系统通过安装在车辆侧后部(如C柱、后保险杠)的雷达传感器和/或盲区摄像头,持续扫描车辆侧后方和侧方的动态。
-
-
判断与预警阶段:
-
当有行人、自行车、摩托车或汽车从后方接近时,系统会计算其速度和轨迹。
-
一旦判断出对方会在车门打开的瞬间经过,系统便会触发警报。
-
警报触发时机:通常是在车内人员手动触碰门把手或开始拉动车门内开关的瞬间。系统非常智能,它知道您有开门的意图。
-
-
警报形式:
-
视觉警报:在对应的外侧后视镜、A柱(车窗三角区) 或顶棚控制区会亮起醒目的警示图标(通常是一个红色的车门打开符号,或一个黄色的三角形警示符)。
-
声音警报:发出“嘀嘀嘀”的急促蜂鸣声。
-
触觉警报(少数车型) :门把手或座椅可能会产生震动。
-
9.3 DOW 与其他系统的关联
DOW 可以被看作是 盲区监测系统 在车辆静止状态下的一个特定功能延伸和强化。
-
BSW/LCA:主要在车辆行驶时监测侧后方盲区,辅助变道。
-
RCTA:主要在车辆倒车时监测后方横向来车。

-
DOW:主要在车辆静止、人员准备下车时监测侧后方来车来人。
它们共同构成了车辆侧后方的 360 度安全防护网络。
9.4 重要注意事项
-
是预警,非自锁:DOW 系统不会自动锁死车门阻止您开门。它只负责发出警告,最终是否开门仍由车主决定。
-
养成“荷式开门法”习惯:无论车辆是否配备 DOW,都应养成安全的开门习惯。即用离车门较远的那只手去开门(例如司机用右手开),这个动作会迫使您的身体和头部自然转动,从而更好地观察侧后方情况。DOW 是最后一道科技防线,而良好的驾驶习惯才是第一道、也是最可靠的防线。
十、RCTB(Rear Cross Traffic Brake) - 后方横向来车制动系统
首先会警告驾驶员;如果驾驶员未采取任何应对措施,系统会自动进行紧急刹车,以避免或减轻碰撞。
RCTA 是 “提醒你后面有车来,小心!”
RCTB 是 “提醒你后面有车来!如果你没反应,我就帮你踩死刹车!
十一、ELK(Emergency Lane Keeping)- 紧急车道保持
11.1 ELK是什么?
ELK 是一个主动安全系统,它的核心目的是在驾驶员无意识或非自愿地偏离车道,并可能引发严重侧向碰撞时,进行紧急干预,将车辆拉回本车道内。
11.2 ELK 与普通 LKA 的核心区别
-
LKA 像一位耐心的教练,全程轻轻扶着方向盘,帮你保持在车道中心。
-
ELK 像一位警觉的保镖,平时不动声色,只在你要撞上旁边车辆或护栏的瞬间,猛地把你拉回来。