现代循环神经网络
目录
门控循环单元(GRU)
门控隐状态
重置门和更新门
候选隐状态
隐状态
从零开始实现
长短期记忆网络(LSTM)
输入门、忘记门和输出门
候选记忆元
记忆元
从零开始实现
门控循环单元(GRU)
RNN计算梯度时遇到的问题:当进行矩阵连续乘积时,可能会导致梯度消失(梯度变得非常小,无法有效更新模型参数)或梯度爆炸(梯度变得非常大,导致模型不稳定)。
三种情况下,这种梯度异常可能带来的意义或影响:
-
长期依赖问题: 早期观测值对预测未来观测值非常重要(例如,序列末尾的校验和),但如果缺乏记忆机制,早期信息的影响会随着时间推移而减弱,导致模型无法捕捉长期依赖关系。
-
无关观测值的干扰: 序列中可能包含与预测目标无关的观测值(例如,网页情感分析中的HTML代码),我们希望模型能够忽略这些无关信息。
-
序列内部状态的重置需求: 序列中可能存在逻辑中断或过渡(例如,书籍章节的过渡),此时我们可能需要一种机制来重置模型的内部状态。
解决方案:长短期记忆(LSTM)和门控循环单元(GRU)
-
为了解决上述问题,学术界提出了许多方法。其中最早且广泛使用的是**长短期记忆(LSTM)**模型,由 Hochreiter and Schmidhuber 在1997年提出。
-
门控循环单元(gated recurrent unit, GRU),由 Cho et al. 在2014年提出。
-
GRU被描述为LSTM的一个稍微简化的变体,它能够提供与LSTM同样的效果,但在计算上速度更快(因为它参数更少,结构更简单)。
门控隐状态
门控循环单元与普通的循环神经网络之间的关键区别在于: 前者支持隐状态的门控。 这意味着模型有专门的机制来确定应该何时更新隐状态, 以及应该何时重置隐状态。 这些机制是可学习的,并且能够解决了上面列出的问题。 例如,如果第一个词元非常重要, 模型将学会在第一次观测之后不更新隐状态。 同样,模型也可以学会跳过不相关的临时观测。 最后,模型还将学会在需要的时候重置隐状态。
重置门和更新门
-
重置门(reset gate):这个门决定了我们应该“忘记”过去的隐藏状态的多少。它允许模型选择性地忽略掉一部分旧的信息。
-
更新门(update gate):这个门决定了有多少旧的隐藏状态信息需要保留,以及有多少新的隐藏状态信息需要加入。
计算公式
在给定的时间步 ,模型接收一个大小为
的小批量输入
(其中
是样本数,
是输入特征数)。
前一个时间步的隐藏状态是 ,其维度为
(其中
是隐藏单元的数量)。
重置门:
更新门:
和
是权重参数,维度为
。
和
也是权重参数,维度为
。
和
是偏置参数,维度为
。
候选隐状态
在门控循环单元(GRU)中,候选隐状态 是对传统RNN隐状态更新机制的一种改进,它引入了重置门(Reset Gate)
来控制过去隐状态对当前候选状态的影响。
计算公式
参数说明:
: 当前时间步的输入向量
: 上一时间步的隐状态
: 重置门向量,元素值在
之间
: Hadamard积(按元素相乘)
: 输入到候选状态的权重矩阵
: 隐状态到候选状态的权重矩阵
: 偏置项
: 激活函数,将输出压缩到
区间
重置门的作用
-
当 Rt 接近 1 时:表示“保留”过去的信息,候选状态类似于标准RNN的更新方式。
-
当 Rt 接近 0 时:表示“忽略”过去的信息,候选状态主要依赖于当前输入 Xt,相当于“重置”了隐状态。
候选隐状态是GRU中用于平衡历史信息与当前输入的关键机制。通过重置门,模型可以灵活地决定是否使用过去的隐状态来生成新的候选状态,从而增强模型对长期依赖关系的建模能力。
隐状态
在门控循环单元(GRU)中,候选隐状态 只是中间结果,最终的隐状态
是由 更新门
控制下的 旧隐状态
与 候选隐状态
的凸组合(加权平均)决定的。
最终隐状态更新公式:
符号说明:
:更新门向量,元素值越接近1表示越“保留”旧状态
:Hadamard积(按元素相乘)
:上一时间步的隐状态
:当前时间步的候选隐状态(由重置门和输入决定)
更新门的作用
| 更新门值 | 行为 | 含义 |
|---|---|---|
| 几乎不更新,保留旧状态,忽略当前输入 | ||
| 完全更新,新状态由当前输入和候选状态决定 |
设计意义
-
缓解梯度消失:如果整个子序列的更新门都接近1,旧状态可以被长期保留,从而跨越多个时间步传递信息。
-
捕捉长期依赖:更新门允许模型选择性遗忘或保留历史信息,有助于建模长距离依赖。
-
与重置门分工:
-
重置门(Reset Gate)→ 控制短期依赖(是否忽略最近的状态)
-
更新门(Update Gate)→ 控制长期依赖(是否保留遥远的历史)
-
从零开始实现
import torch
from torch import nn
from d2l import torch as d2lbatch_size, num_steps = 32, 35
train_iter, vocab = d2l.load_data_time_machine(batch_size, num_steps)
def get_params(vocab_size, num_hiddens, device):num_inputs = num_outputs = vocab_sizedef normal(shape):return torch.randn(size=shape, device=device)*0.01def three():return (normal((num_inputs, num_hiddens)),normal((num_hiddens, num_hiddens)),torch.zeros(num_hiddens, device=device))W_xz, W_hz, b_z = three() # 更新门参数W_xr, W_hr, b_r = three() # 重置门参数W_xh, W_hh, b_h = three() # 候选隐状态参数# 输出层参数W_hq = normal((num_hiddens, num_outputs))b_q = torch.zeros(num_outputs, device=device)# 附加梯度params = [W_xz, W_hz, b_z, W_xr, W_hr, b_r, W_xh, W_hh, b_h, W_hq, b_q]for param in params:param.requires_grad_(True)return params
def init_gru_state(batch_size, num_hiddens, device):return (torch.zeros((batch_size, num_hiddens), device=device), )
def gru(inputs, state, params):W_xz, W_hz, b_z, W_xr, W_hr, b_r, W_xh, W_hh, b_h, W_hq, b_q = paramsH, = stateoutputs = []for X in inputs:Z = torch.sigmoid((X @ W_xz) + (H @ W_hz) + b_z)R = torch.sigmoid((X @ W_xr) + (H @ W_hr) + b_r)H_tilda = torch.tanh((X @ W_xh) + ((R * H) @ W_hh) + b_h)H = Z * H + (1 - Z) * H_tildaY = H @ W_hq + b_qoutputs.append(Y)return torch.cat(outputs, dim=0), (H,)
vocab_size, num_hiddens, device = len(vocab), 256, d2l.try_gpu()
num_epochs, lr = 500, 1
model = d2l.RNNModelScratch(len(vocab), num_hiddens, device, get_params,init_gru_state, gru)
d2l.train_ch8(model, train_iter, vocab, lr, num_epochs, device)1. 数据加载
batch_size, num_steps = 32, 35
train_iter, vocab = d2l.load_data_time_machine(batch_size, num_steps)
-
batch_size=32:每次喂给网络 32 条序列。 -
num_steps=35:每条序列长度 35 个字符。 -
返回值
-
train_iter:无穷迭代器,每次产生(X, Y)形状都是(32,35),X是输入字符索引,Y是偏移 1 位的目标字符索引。 -
vocab:d2l.Vocab对象,能把字符↔索引互转。
-
2. 参数初始化 get_params
def get_params(vocab_size, num_hiddens, device):
num_inputs = num_outputs = vocab_size # 输入/输出维度都是词表大小
def normal(shape):
return torch.randn(size=shape, device=device)*0.01 # 高斯初始化
def three():
# 3 个共享初始化方式的矩阵/向量
return (normal((num_inputs, num_hiddens)),
normal((num_hiddens, num_hiddens)),
torch.zeros(num_hiddens, device=device))
-
GRU 需要 3 组门/状态 的权重,每组 3 个张量:
-
输入→门/状态
(vocab_size, num_hiddens) -
隐状态→门/状态
(num_hiddens, num_hiddens) -
偏置
(num_hiddens,)
W_xz, W_hz, b_z = three() # 更新门 Z
W_xr, W_hr, b_r = three() # 重置门 R
W_xh, W_hh, b_h = three() # 候选隐状态 ˜H
输出层:
W_hq = normal((num_hiddens, num_outputs)) # 隐状态→输出
b_q = torch.zeros(num_outputs, device=device)
把所有参数收进列表并打开梯度:
params = [W_xz, W_hz, b_z, W_xr, W_hr, b_r, W_xh, W_hh, b_h, W_hq, b_q]
for param in params:
param.requires_grad_(True)
return params
3. 隐状态初始化 init_gru_state
def init_gru_state(batch_size, num_hiddens, device):
return (torch.zeros((batch_size, num_hiddens), device=device), )
-
返回 元组
(H,),方便与 LSTM 等状态兼容(LSTM 有(H,C))。 -
初始隐状态全 0,形状
(batch_size, num_hiddens)。
4. 核心:一步 GRU 计算 gru
def gru(inputs, state, params):
# 拆包
W_xz, W_hz, b_z, W_xr, W_hr, b_r, W_xh, W_hh, b_h, W_hq, b_q = params
H, = state
outputs = []
-
inputs是 列表,长度=num_steps,每个元素形状(batch_size, vocab_size)(one-hot 向量)。 -
遍历时间步:
for X in inputs: # X: (batch, vocab_size)
Z = torch.sigmoid((X @ W_xz) + (H @ W_hz) + b_z) # 更新门
R = torch.sigmoid((X @ W_xr) + (H @ W_hr) + b_r) # 重置门
H_tilda = torch.tanh((X @ W_xh) + ((R * H) @ W_hh) + b_h) # 候选状态
H = Z * H + (1 - Z) * H_tilda # 最终隐状态
Y = H @ W_hq + b_q # 输出 logits
outputs.append(Y)
return torch.cat(outputs, dim=0), (H,)
把 num_steps 个 (batch, vocab_size) 的 Y 在 dim=0 上拼起来 → (num_steps*batch, vocab_size),正好与 Y_true 的形状对应。
5. 组装模型并训练
vocab_size, num_hiddens, device = len(vocab), 256, d2l.try_gpu()
num_epochs, lr = 500, 1
model = d2l.RNNModelScratch(
vocab_size, num_hiddens, device,
get_params, init_gru_state, gru)d2l.train_ch8(model, train_iter, vocab, lr, num_epochs, device)
-
d2l.RNNModelScratch是 d2l 提供的通用训练壳,它会把:-
你给的
get_params/init_gru_state/gru组装成forward; -
自动做 softmax 交叉熵损失;
-
做 梯度裁剪、** perplexity 计算**、采样生成文本。
-
-
训练 500 个 epoch,学习率 1。
-
每 epoch 打印困惑度(perplexity)+ 采样 50 个字符检验效果。
简洁实现
num_inputs = vocab_size
gru_layer = nn.GRU(num_inputs, num_hiddens)
model = d2l.RNNModel(gru_layer, len(vocab))
model = model.to(device)
d2l.train_ch8(model, train_iter, vocab, lr, num_epochs, device)高级API包含了前文介绍的所有配置细节, 所以我们可以直接实例化门控循环单元模型。 这段代码的运行速度要快得多, 因为它使用的是编译好的运算符而不是Python来处理之前阐述的许多细节。
长短期记忆网络(LSTM)
-
LSTM 的灵感来源于 计算机逻辑门。
-
引入 记忆元(memory cell),用于记录附加信息,帮助网络更好地捕捉长期依赖。
-
记忆元与隐状态形状相同,但功能不同:隐状态负责短期输出,记忆元负责长期存储。
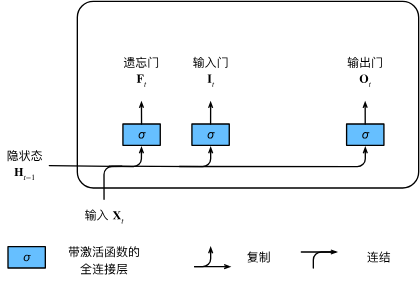
输入门、忘记门和输出门
| 门的名称 | 作用 | 符号 |
|---|---|---|
| 遗忘门(Forget Gate) | 决定丢弃记忆元中的哪些信息 | |
| 输入门(Input Gate) | 决定哪些新信息存入记忆元 | |
| 输出门(Output Gate) | 决定记忆元中哪些信息用于当前输出 |
长短期记忆网络的数学表达:
输入:
上一隐状态:
则三个门的计算方式为:
其中:
是 Sigmoid 激活函数
是权重矩阵,
是偏置项
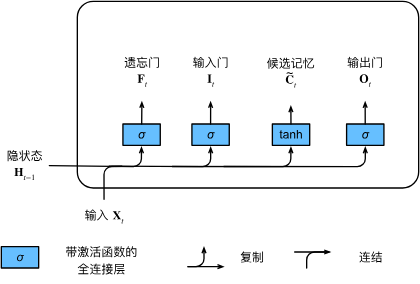
候选记忆元
作用
-
提供新的候选信息,供输入门筛选后更新到记忆元中。
-
类似 GRU 中的候选隐状态,但 LSTM 额外用输入门控制其写入比例。
计算方式
激活函数:,输出区间
。
参数:
:输入→候选记忆
:上一隐状态→候选记忆
:偏置
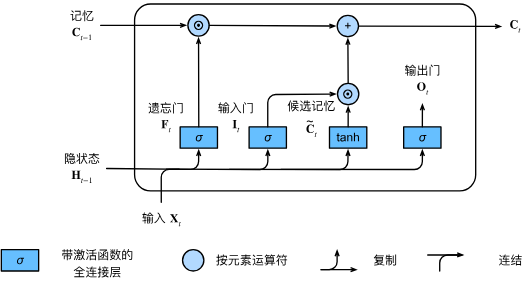
记忆元
作用
-
长期记忆容器 Ct:跨时间步保存信息,缓解梯度消失。
-
由 遗忘门 Ft 和 输入门 It 共同控制“旧记忆保留多少”与“新候选写入多少”。
更新公式
:Hadamard 积(按元素乘)。
:候选记忆元(tanh 输出,范围 −1~1)。
:分别决定旧记忆衰减程度与新信息写入程度。
极端情况直观
- 若
→
:完全保留旧记忆,不写入新信息。
- 若
→
:彻底重写记忆。
从零开始实现
import torch
from torch import nn
from d2l import torch as d2lbatch_size, num_steps = 32, 35
train_iter, vocab = d2l.load_data_time_machine(batch_size, num_steps)
def get_lstm_params(vocab_size, num_hiddens, device):num_inputs = num_outputs = vocab_sizedef normal(shape):return torch.randn(size=shape, device=device)*0.01def three():return (normal((num_inputs, num_hiddens)),normal((num_hiddens, num_hiddens)),torch.zeros(num_hiddens, device=device))W_xi, W_hi, b_i = three() # 输入门参数W_xf, W_hf, b_f = three() # 遗忘门参数W_xo, W_ho, b_o = three() # 输出门参数W_xc, W_hc, b_c = three() # 候选记忆元参数# 输出层参数W_hq = normal((num_hiddens, num_outputs))b_q = torch.zeros(num_outputs, device=device)# 附加梯度params = [W_xi, W_hi, b_i, W_xf, W_hf, b_f, W_xo, W_ho, b_o, W_xc, W_hc,b_c, W_hq, b_q]for param in params:param.requires_grad_(True)return params
def init_lstm_state(batch_size, num_hiddens, device):return (torch.zeros((batch_size, num_hiddens), device=device),torch.zeros((batch_size, num_hiddens), device=device))
def lstm(inputs, state, params):[W_xi, W_hi, b_i, W_xf, W_hf, b_f, W_xo, W_ho, b_o, W_xc, W_hc, b_c,W_hq, b_q] = params(H, C) = stateoutputs = []for X in inputs:I = torch.sigmoid((X @ W_xi) + (H @ W_hi) + b_i)F = torch.sigmoid((X @ W_xf) + (H @ W_hf) + b_f)O = torch.sigmoid((X @ W_xo) + (H @ W_ho) + b_o)C_tilda = torch.tanh((X @ W_xc) + (H @ W_hc) + b_c)C = F * C + I * C_tildaH = O * torch.tanh(C)Y = (H @ W_hq) + b_qoutputs.append(Y)return torch.cat(outputs, dim=0), (H, C)
vocab_size, num_hiddens, device = len(vocab), 256, d2l.try_gpu()
num_epochs, lr = 500, 1
model = d2l.RNNModelScratch(len(vocab), num_hiddens, device, get_lstm_params,init_lstm_state, lstm)
d2l.train_ch8(model, train_iter, vocab, lr, num_epochs, device)数据加载(与 GRU 代码完全一样)
batch_size, num_steps = 32, 35
train_iter, vocab = d2l.load_data_time_machine(batch_size, num_steps)
-
每次喂 32 条序列,每条 35 个字符。
-
train_iter永不停歇地产生(X, Y):-
X:(batch, 35)字符索引 -
Y:(batch, 35)目标索引(X 整体右移 1 位)
-
参数初始化 get_lstm_params
def three(): # 工厂函数:返回 (W_x, W_h, b)
return (normal((num_inputs, num_hiddens)),
normal((num_hiddens, num_hiddens)),
torch.zeros(num_hiddens, device=device))W_xi, W_hi, b_i = three() # 输入门
W_xf, W_hf, b_f = three() # 遗忘门
W_xo, W_ho, b_o = three() # 输出门
W_xc, W_hc, b_c = three() # 候选记忆
W_hq = normal((num_hiddens, num_outputs))
b_q = torch.zeros(num_outputs, device=device)
LSTM 比 GRU 多一个门 + 一个候选记忆元,所以一共 4 组权重,每组 3 个张量。
| 门/状态 | 权重矩阵 1 | 权重矩阵 2 | 偏置 | 作用 |
|---|---|---|---|---|
| 输入门 | 控制写入多少新信息 | |||
| 遗忘门 | 控制丢弃多少旧记忆 | |||
| 输出门 | 控制记忆多少用于输出 | |||
| 候选记忆 | 生成新的候选记忆 | |||
| 输出层 | — | 隐状态 → 字符 logits |
最后把所有参数收进列表并打开梯度:
params = [W_xi, W_hi, b_i, ..., W_hq, b_q]
for p in params:
p.requires_grad_(True)
状态初始化 init_lstm_state
LSTM 的“状态”是一个元组:
-
H:隐状态(batch, num_hiddens)→ 用于当前输出 -
C:记忆元(batch, num_hiddens)→ 用于长期记忆
return (torch.zeros((batch_size, num_hiddens), device=device),
torch.zeros((batch_size, num_hiddens), device=device))
手写 LSTM 前向传播 lstm
def lstm(inputs, state, params):
[W_xi, W_hi, b_i, ..., b_q] = params
H, C = state
outputs = []
for X in inputs: # 逐个时间步处理,X: (batch, vocab_size)
4 个门的计算(全部向量ized,batch 并行)
I = torch.sigmoid(X @ W_xi + H @ W_hi + b_i) # 输入门
F = torch.sigmoid(X @ W_xf + H @ W_hf + b_f) # 遗忘门
O = torch.sigmoid(X @ W_xo + H @ W_ho + b_o) # 输出门
C_tilda = torch.tanh(X @ W_xc + H @ W_hc + b_c) # 候选记忆
记忆元更新
C = F * C + I * C_tilda # (9.2.3) 元素级
隐状态更新
H = O * torch.tanh(C) # 先压缩记忆再按输出门 masking
输出 logits
Y = H @ W_hq + b_q # (batch, vocab_size)
outputs.append(Y)
返回形状
return torch.cat(outputs, dim=0), (H, C)
-
outputs列表里每个Y形状(batch, vocab),共num_steps个。 -
torch.cat后在 dim=0 拼接 →(num_steps * batch, vocab),正好与Y_true扁平后的形状一致。
组装模型 & 训练
vocab_size, num_hiddens, device = len(vocab), 256, d2l.try_gpu()
num_epochs, lr = 500, 1
model = d2l.RNNModelScratch(len(vocab), num_hiddens, device,
get_lstm_params, init_lstm_state, lstm)
d2l.train_ch8(model, train_iter, vocab, lr, num_epochs, device)
-
RNNModelScratch负责:-
调
get_lstm_params初始化参数 -
每个 epoch 调
lstm做前向 + 反向 -
自动算交叉熵、梯度裁剪、采样生成文本
-
-
训练 500 epoch,学习率 1,GPU 上几分钟即可看到困惑度降到 < 50。
简洁实现
num_inputs = vocab_size
lstm_layer = nn.LSTM(num_inputs, num_hiddens)
model = d2l.RNNModel(lstm_layer, len(vocab))
model = model.to(device)
d2l.train_ch8(model, train_iter, vocab, lr, num_epochs, device)