godot实现tileMap地图
前言
前一个文章,我们使用了godot+c#实现使用状态机处理玩家的状态,接下来我们开始实现地图.
如前面所说,我们是制作2D横板游戏为例,所以实际地图会按照这个方向制作地图,实际运行结果如下

素材导入
按照前面文章,我们的素材不是很符合要求,因此我这边进行引入了一个素材
basic-140-tiles-grassland-and-mines
- 打开之后是这样的
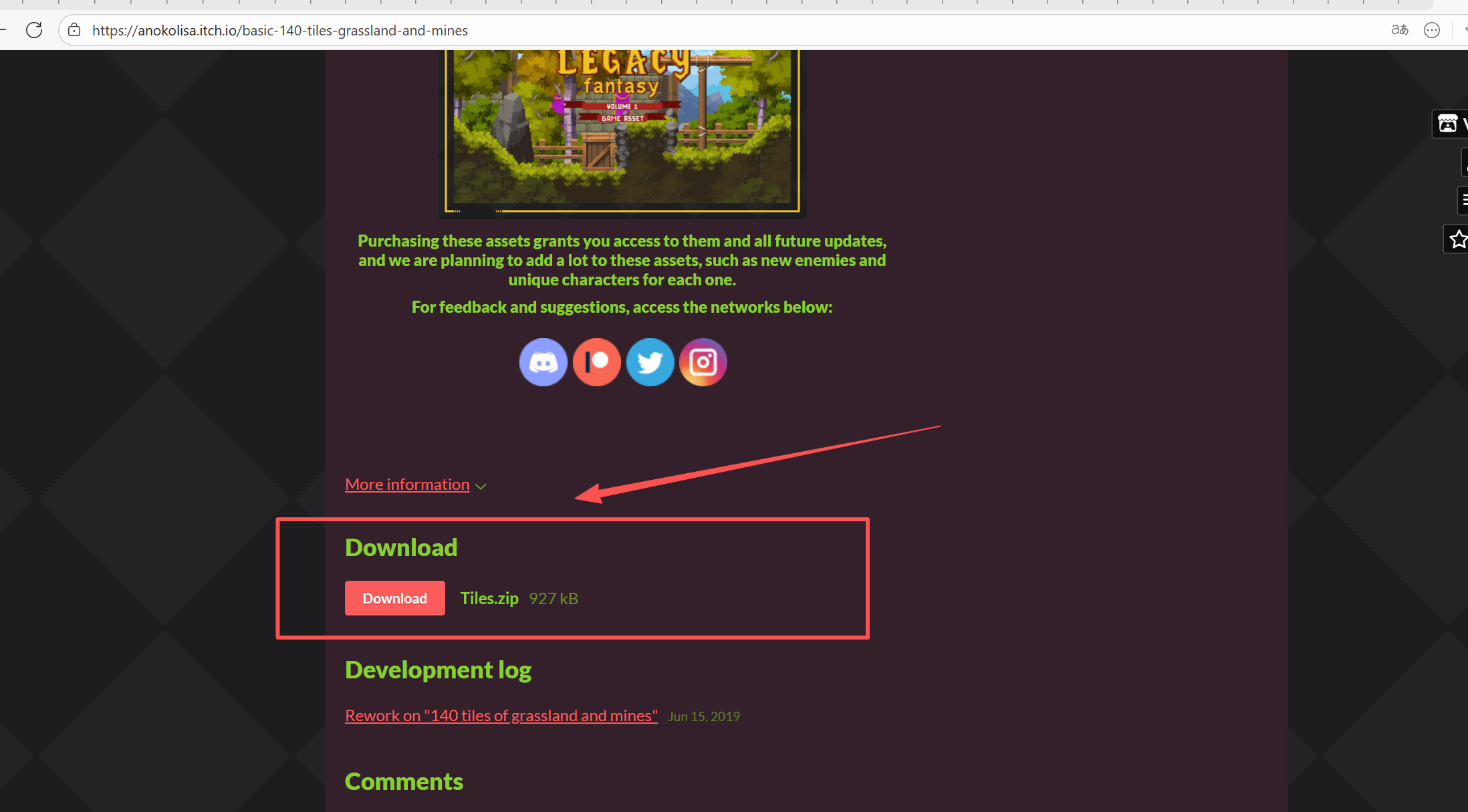
- 滑动到下面,找到
DownLoad和我前面的文章引用玩家素材的过程一样
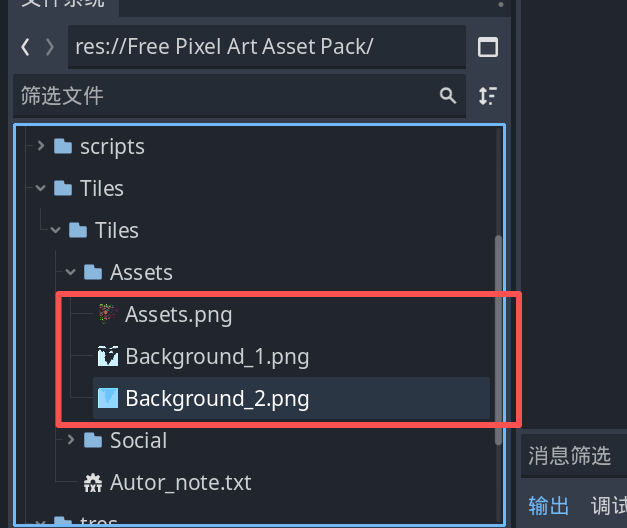
- 下载之后解压放到游戏项目根目录,这个
Tiles就是解压之后的文件,后面我们需要用到Assets文件夹下的文件
无限滚动背景
现在,我们的场景地图是很粗糙的,并且一旦走到头,如果单纯放置图片的话,那么超出固定的背景图片区域之后,我们背景就会变成没有图片的状态,因此我们需要进行设置
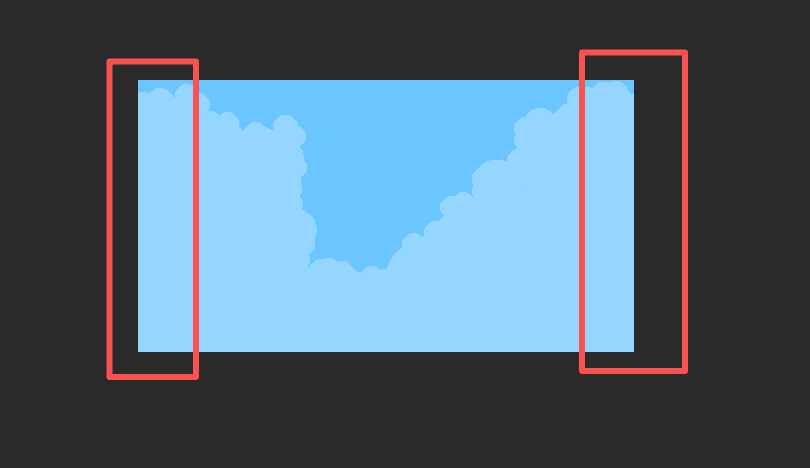
PS:要使用我接下来说的,要求你背景的两端是可以接续的,否则会看到明显的间隙,以导入的图片如下为例,是接续的
我们这里使用
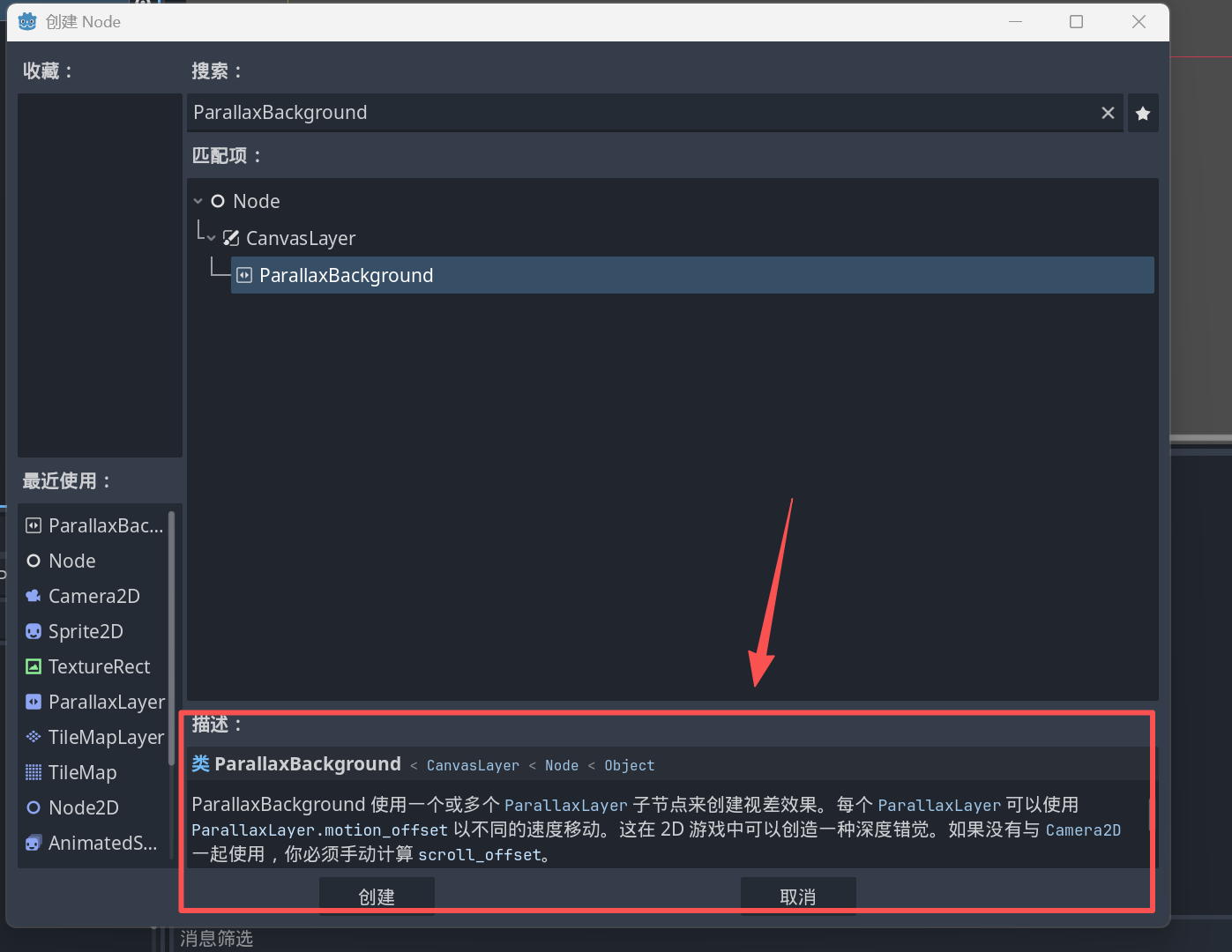
ParallaxBackground
那么这个是什么组件?在我们给场景添加节点的时候,就有标注,他的备注是
用于创建视差滚动背景的节点。 ParallaxBackground 使用一个或多个 ParallaxLayer 子节点来创建视差效果。每个 ParallaxLayer 可以使用 ParallaxLayer.motion_offset 以不同的速度移动。这在 2D 游戏中可以创造一种深度错觉。如果没有与 Camera2D 一起使用,你必须手动计算 scroll_offset。
注意:每个 ParallaxBackground 都是在各自的 Viewport 中绘制的,无法在不同 Viewport 之间共享,见 CanvasLayer.custom_viewport。在分屏游戏等使用多个 Viewport 的场景下,你需要每个需要绘制的 Viewport 创建单独的 ParallaxBackground。
接下来。我只是对他进行一个简单运用,如果需要了解更多,请查找其他资料
- 首先,我们新建一个
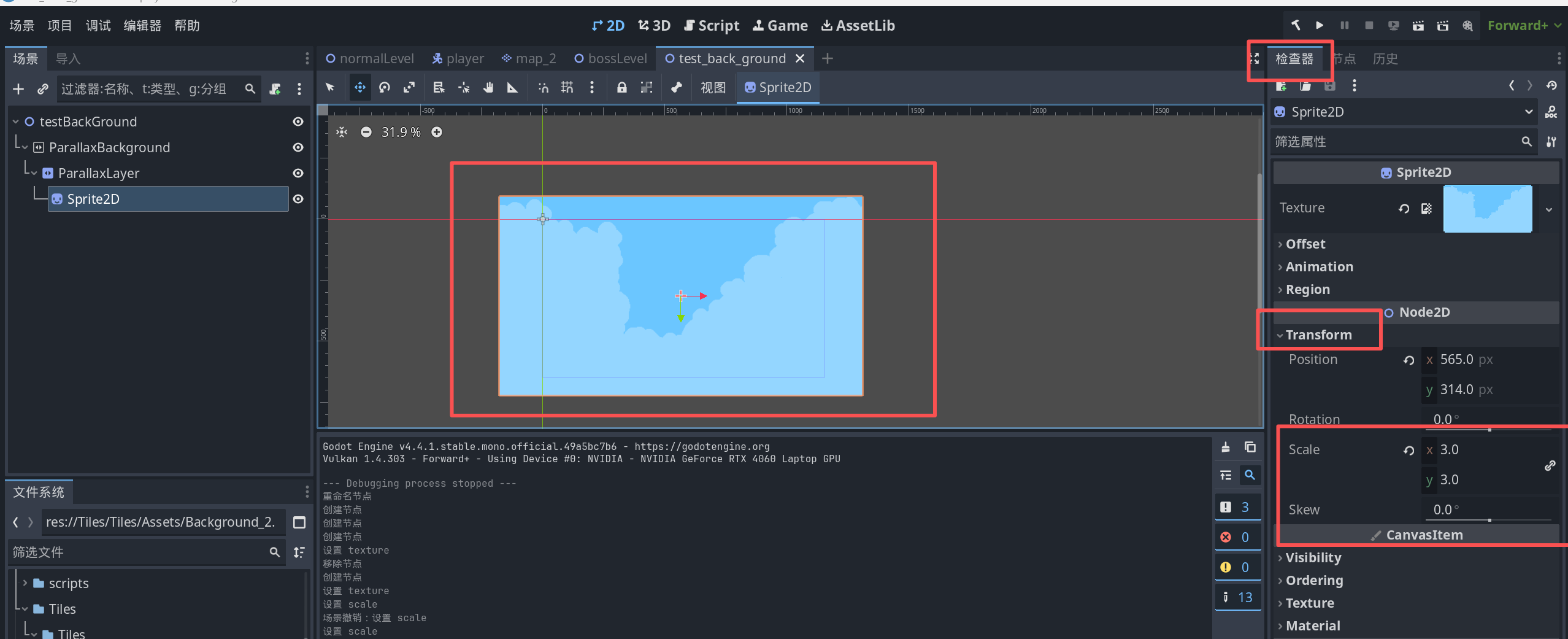
Node2D节点,在他的节点下创建子节点ParallaxBackground,然后在ParallaxBackground的子节点下创建ParallaxLayer节点,这个节点是专门用于ParallaxBackground配合使用的,然后,在我们的ParallaxLayer下创建一个Sprite2D2D图像节点.点击这个图像节点然后拖动背景图到检查器的Texture图像纹理属性,并调整图片的缩放,使其覆盖视口
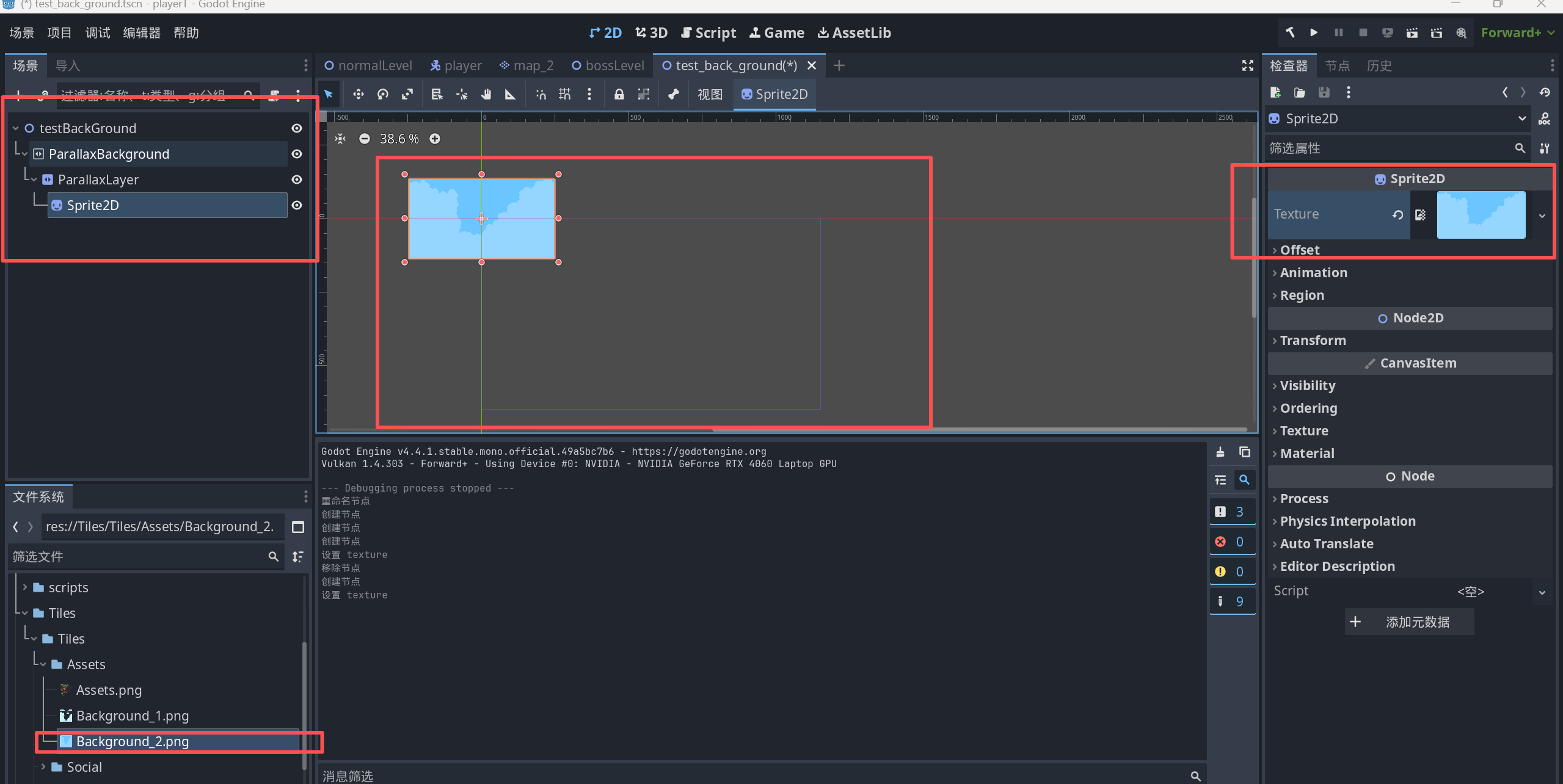
如我这里
检查器的Transform的scale都设置的x轴和y轴都设置了3倍,并且调整图片位置覆盖视口宽高
假如现在在下方加一个碰撞体充当地面,然后让玩家行走,为了让画面始终跟随玩家,我们需要在玩家节点下新增一个
Camera2D节点
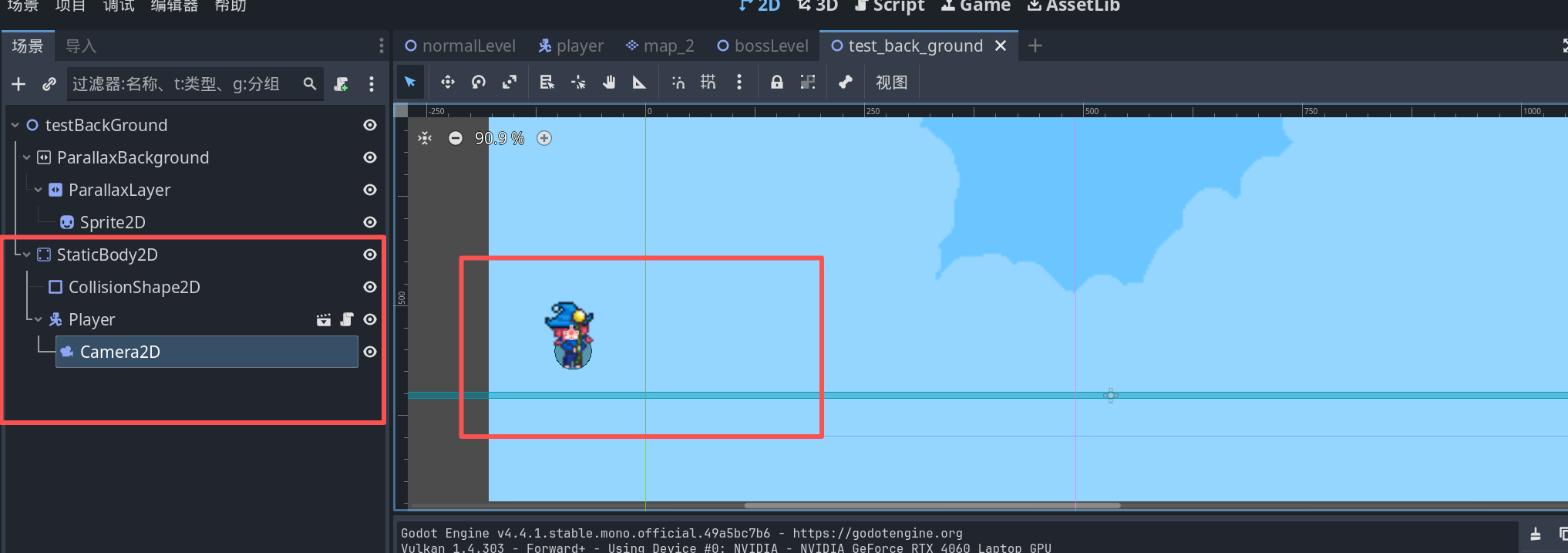
注意,记得调整玩家的碰撞体形状大小,以适应后面的地图,加完之后,你此时启动游戏画面发现会是这样的

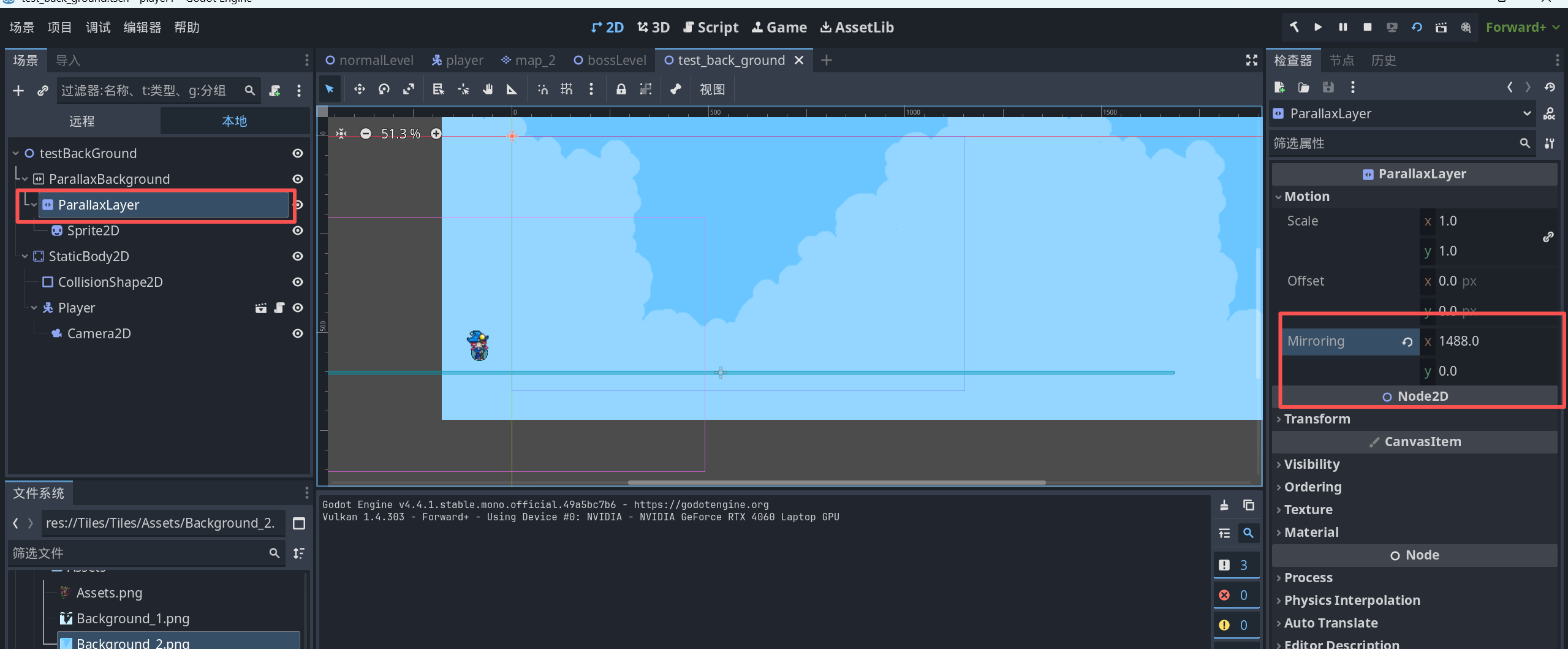
这个是因为我们还有关键参数未设定,在
ParallaxLayer的检查器的Motion下有一个Mirroring属性,我们需要将其设定为图片宽度像素乘以缩放倍率,因为我们这个游戏是2d横版游戏,因为只需要横向无限滚动即可,另外说一句Motion有一个Scale属性,是控制背景图移动快慢的,一旦值是(0,0)就不会参与滚动
我们找到我们的背景图,悬停,是可以看到图片的宽高的
这里显示我们的长是496,高是272,结合我们前面的缩放倍率3.0
所以,我们的Mirroring,应该设置为(1488,0)
再次运行结果如下,可以看到,玩家在图片左边边缘,但是左右移动实际是无限滚动的,
需要注意的是,这里我只是演示,实际缩放倍率需要根据自己项目来,更多的还需要考虑玩家跳跃之后的高度也要覆盖,并且如果需要覆盖Y轴的无限滚动,设置另一个Y轴值即可

TileMap制作
设置图块
如上我们就实现了横轴无限背景图滚动,然后我们开始制作我们的地图,在原来的制作背景的场景下的主节点Node2D下新建子节点
TileMapLayer,在点击它之后找到检查器的Tile Set属性,在它身上鼠标右键新建
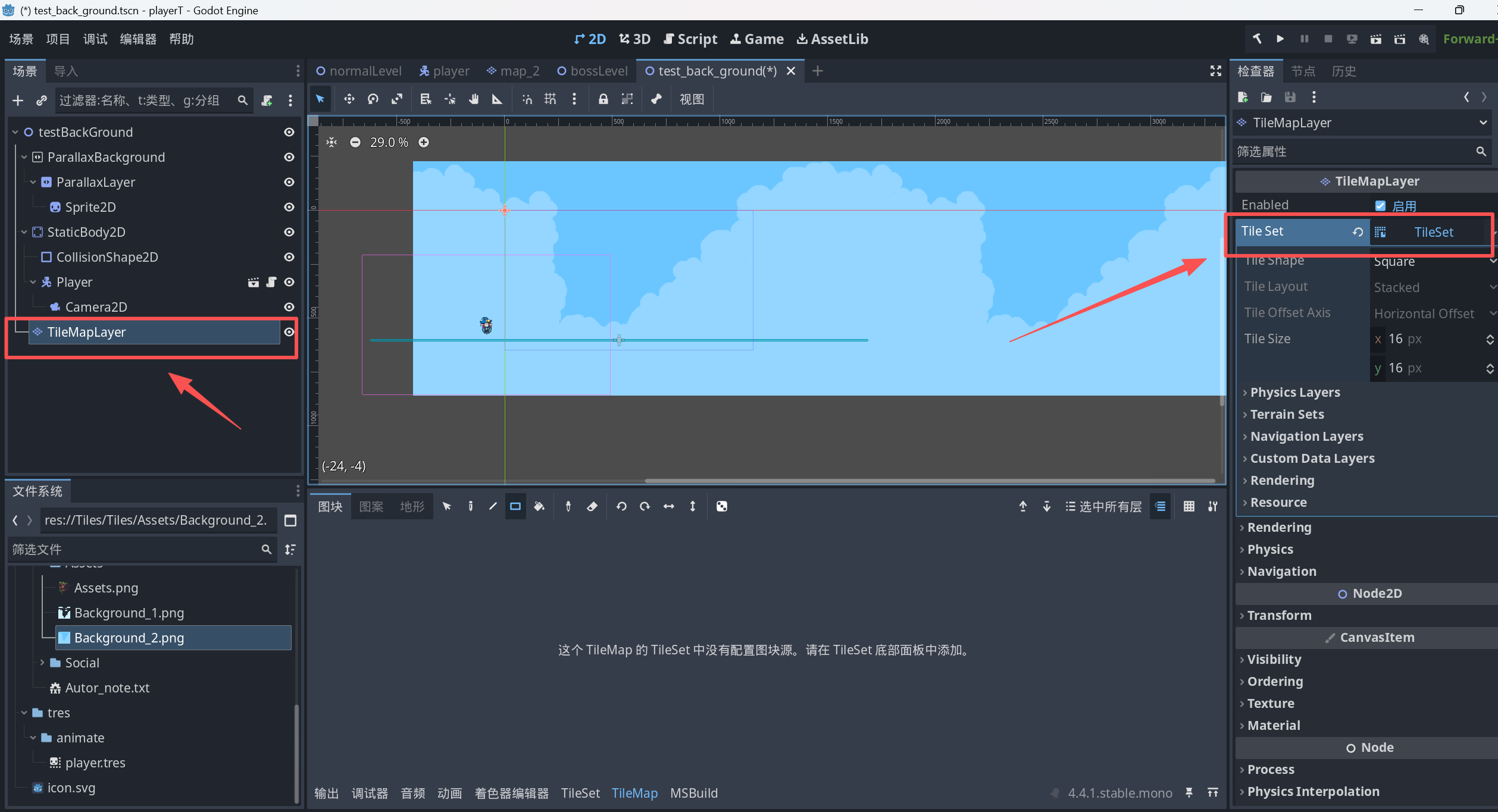
然后我们在中下方会出现一个tileMap相关的功能窗口,
其中TileSet是维护我们的地图的资源
TileMap是将我们维护好的地图资料,绘制在我们的场景中
点击TileSet开始导入我们导入好的地图资源,然后我们会看到图块源和图案,我们点击图块源,然后下面的有一个+号,点击之后后出现一个图集和场景合集,我们点击图集,找到我们导入的Assets.png图片,引入
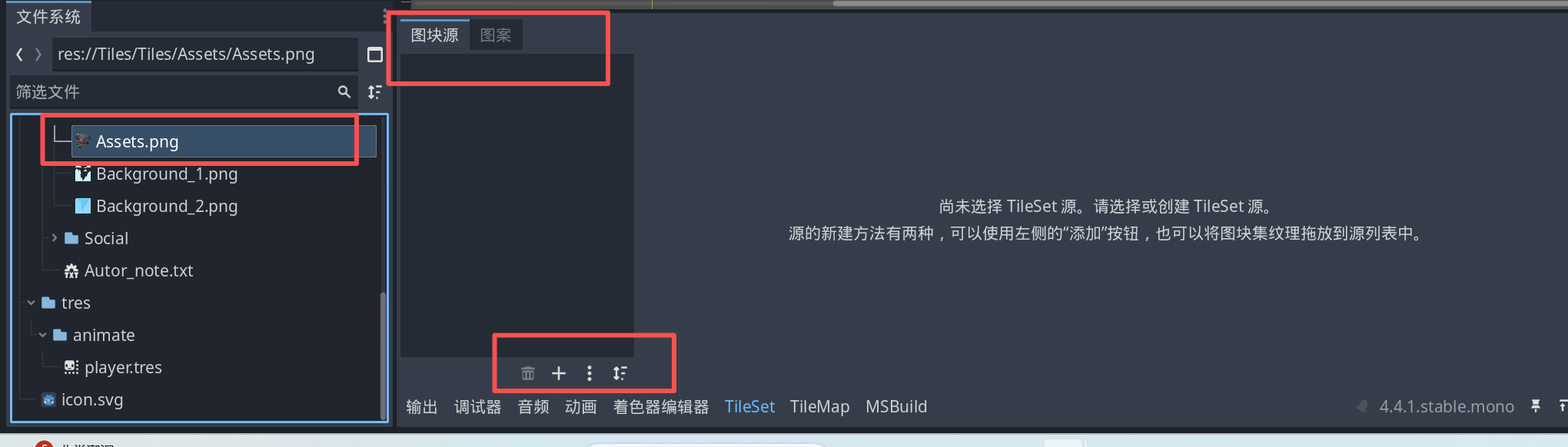
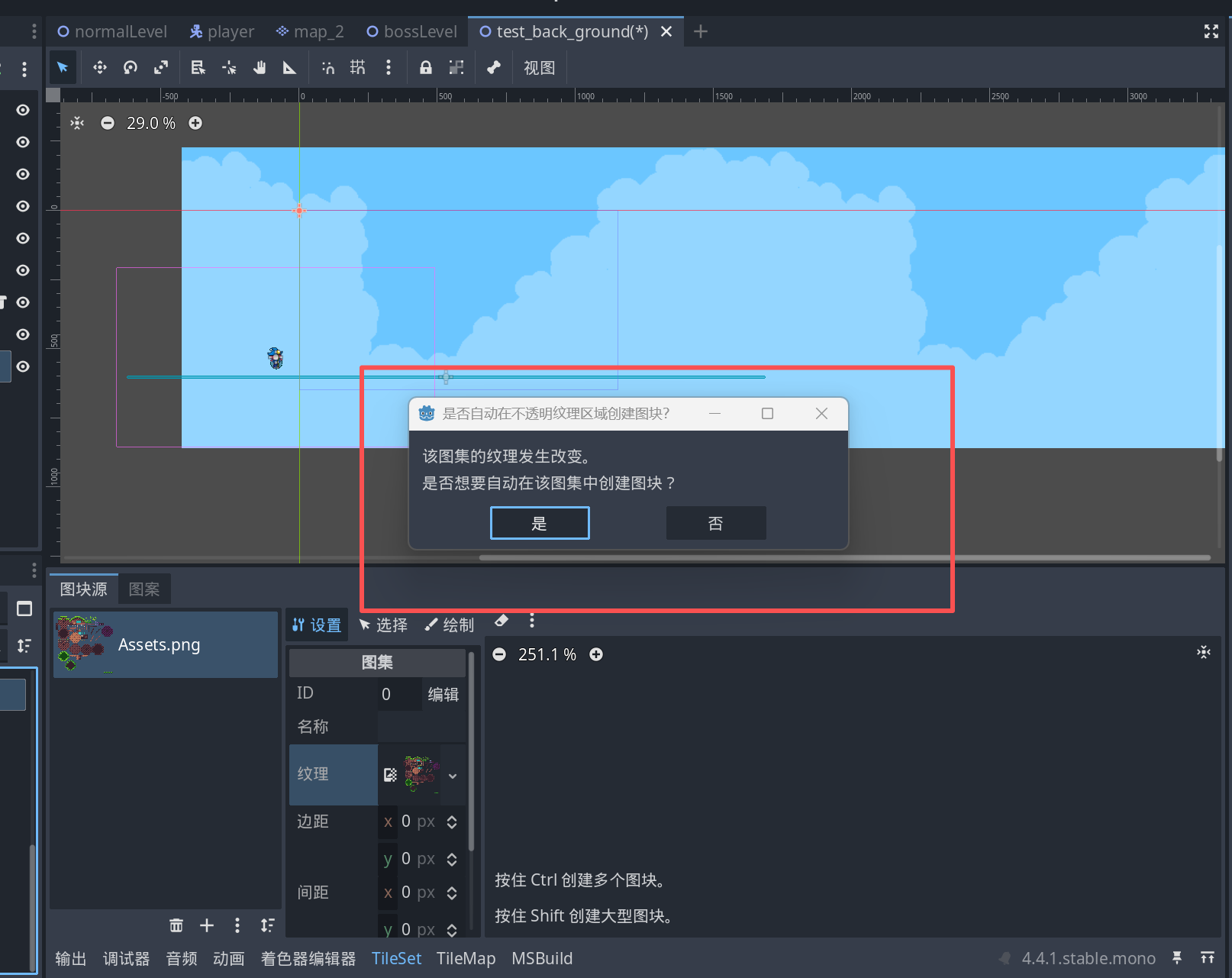
然后会提示是否自动创建图块,这个根据我们的实际项目情况来,假如说,这个素材,是用于专门创建地形的,并且指定全是同一种地形,全部都可以引用到你的tileMap,你可以选择需要,否则如果存在部分图块你是不需要的,你就选择否,那么为了方便演示,我选择是

然后tileMap功能窗口中间上方,会出现三个按钮
设置选择绘制
设置的作用是让你选择那些图块可以参与进行绘制到场景
选择是根据自己选择的图块,进行设置一些参数,如添加碰撞体等
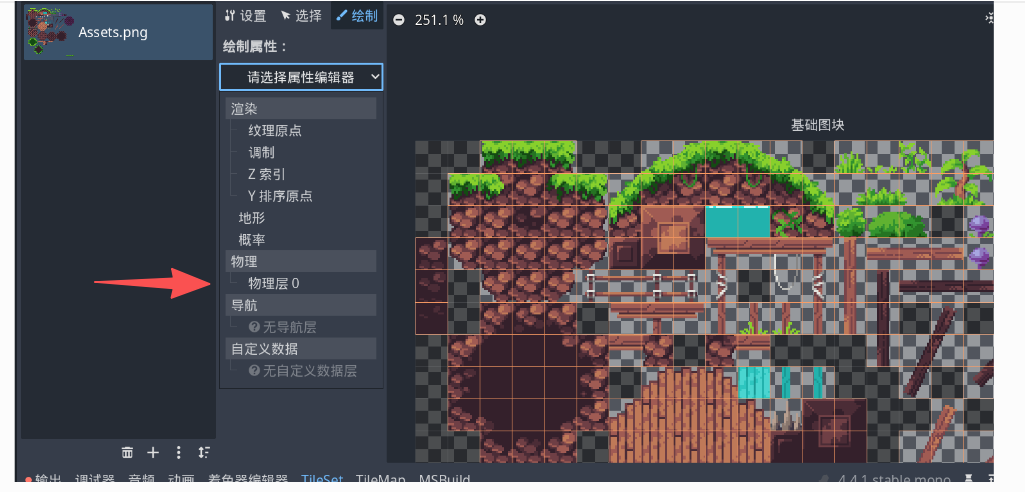
绘制是赋予图块属性,如物理碰撞层,导航层等
这里我只是进行一些简单的解释描述,更具体请查找其他资料参考
- 这里,我需要绘制一些物理碰撞层的图块,因此需要在绘制调整一些属性
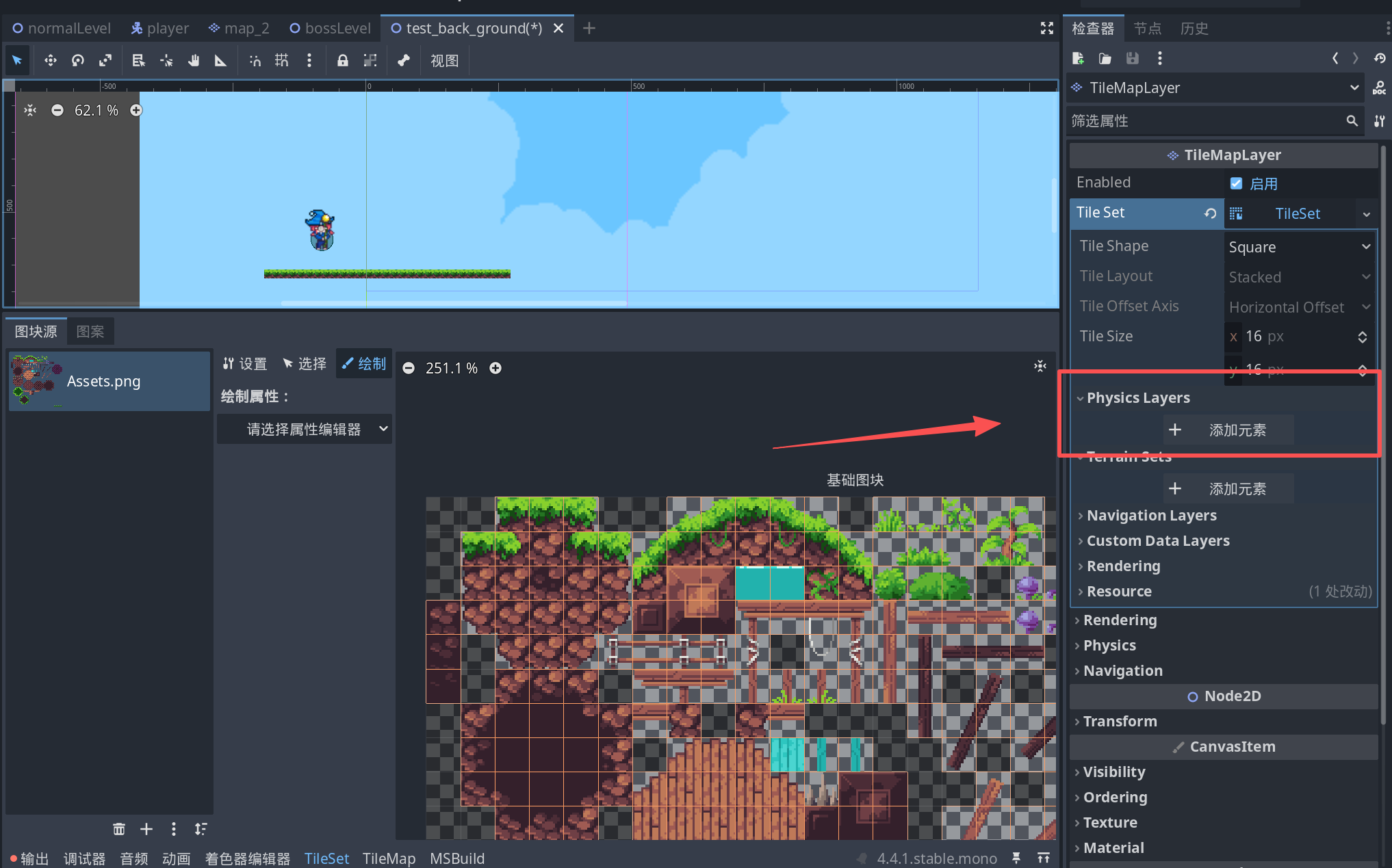
首先,在我们的
检查器下,找到Physics Layers属性,点击添加元素
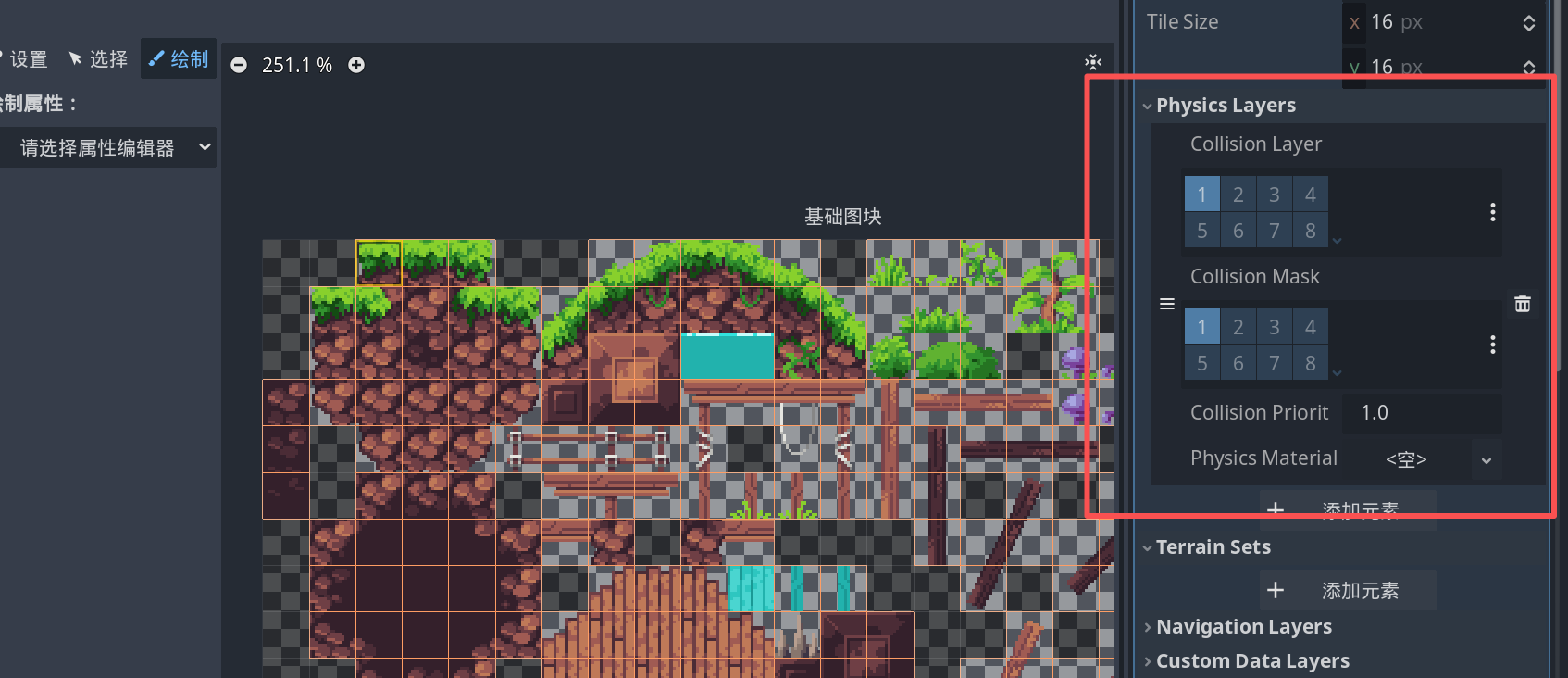
需要注意的是,添加元素之后有两个属性
Collision Layer代表的是这个物理层所在的层级
Collision Mask代表的是这个物理层所在的层级可以和哪些层级发生碰撞
如果我们此时点击玩家节点的根节点,我们会发现它检查器有一个Collision属性
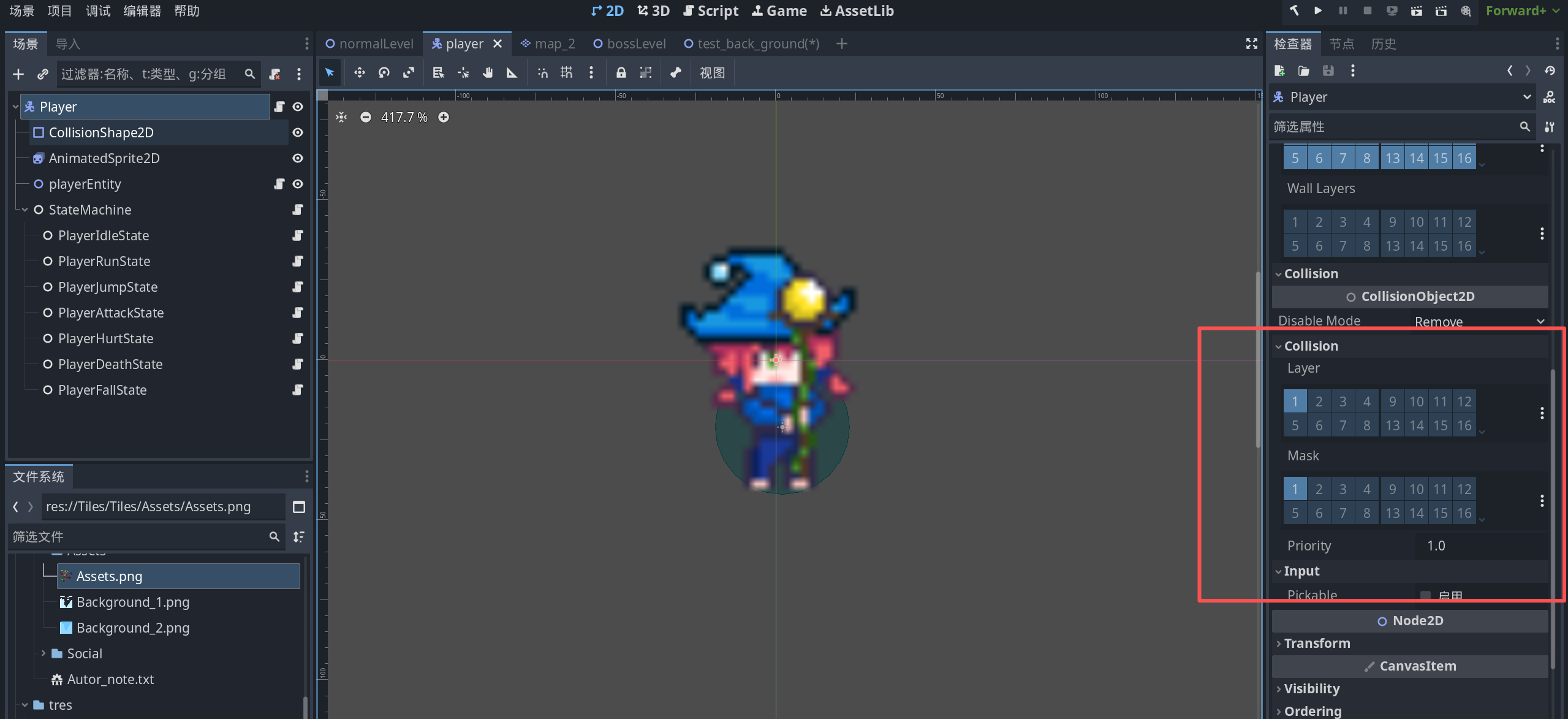
有一个
Layer和一个Mask作用是一样的,需要两者可碰撞的层级在设定可碰撞范围才可以发生碰撞
添加好之后,我们就可以在
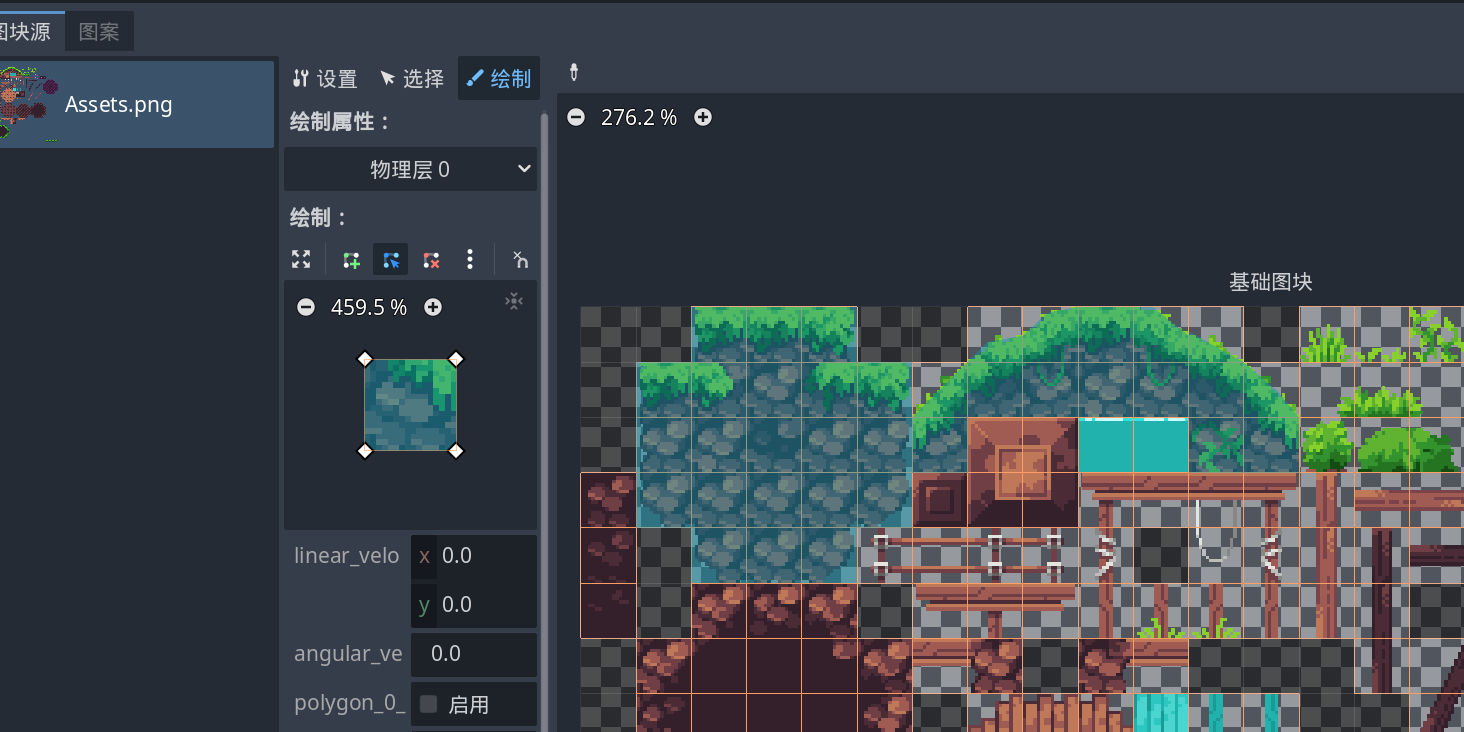
绘制,进行选择编辑的属性,选择物理,然后它会出现一个淡蓝色的方块,这个方块是针对每一个图块需要设置碰撞的形状范围
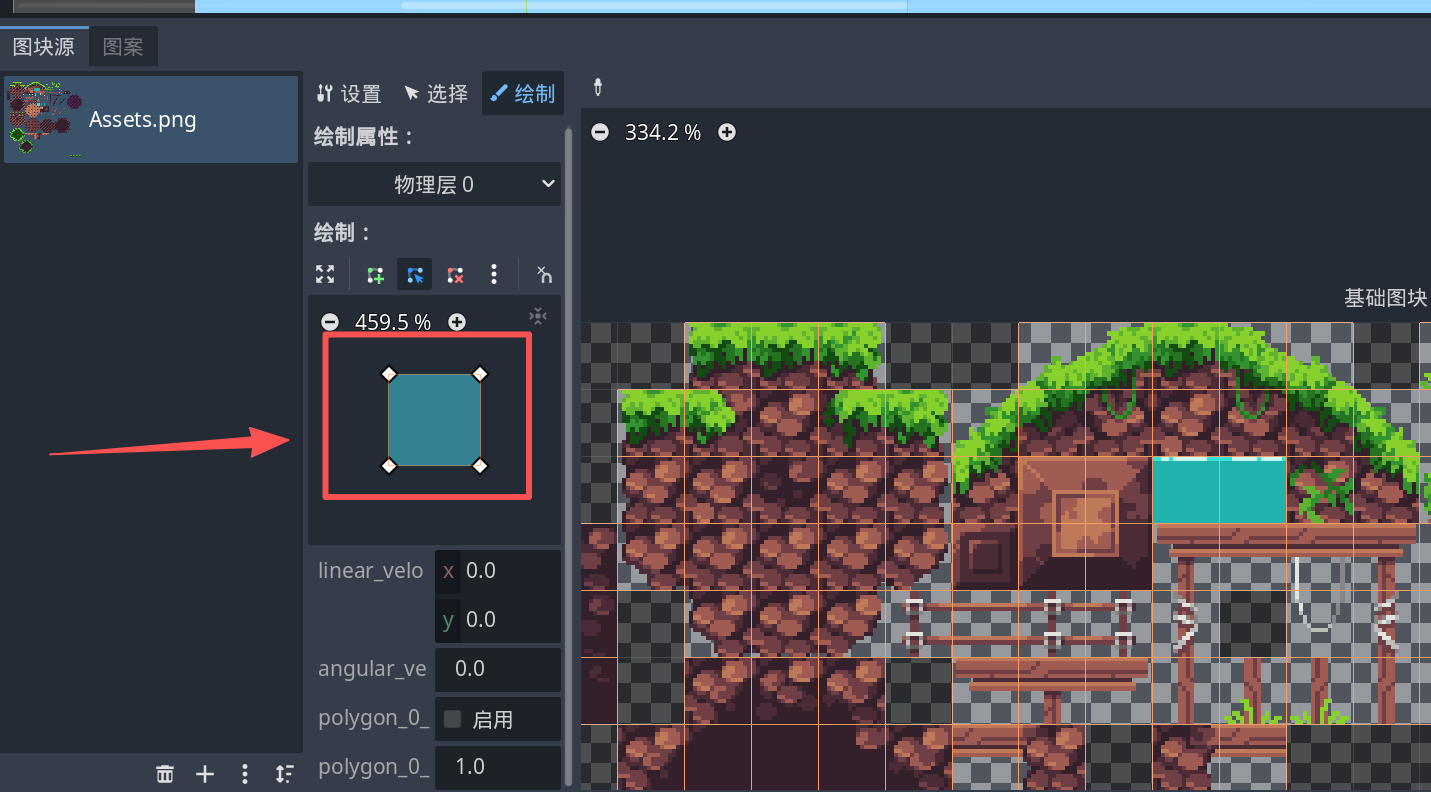
选择我们需要添加碰撞体的图块,可以看到我们的图块成功赋予了物理碰撞
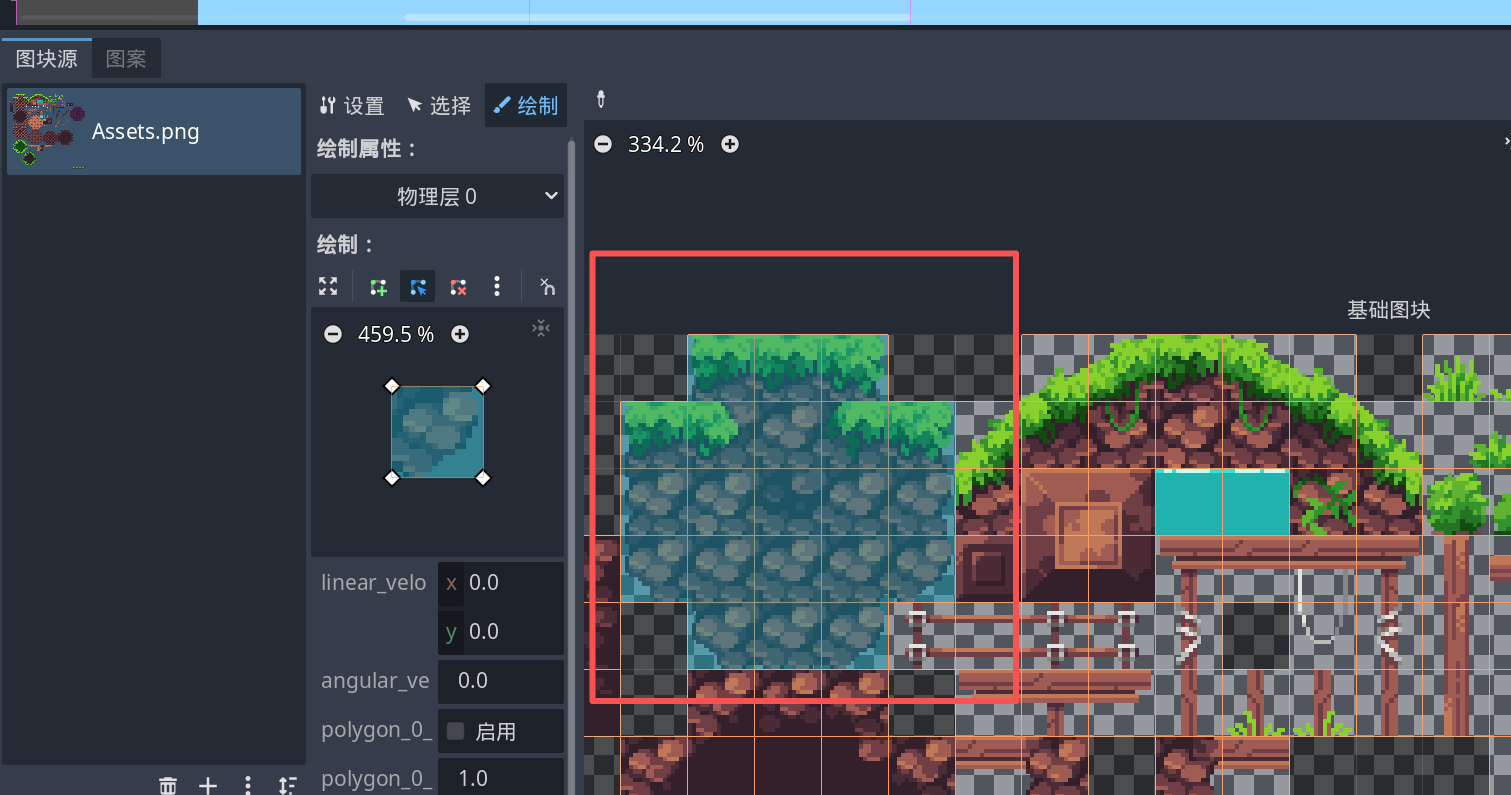
但是有一个问题,我们右边一点图块有一个坡度,我们希望的是物理层只需要加到有图片的地方,因此需要点击我们的图块,然后调整我们的碰撞体形状,然后再次点同一个图块调整 碰撞体形状
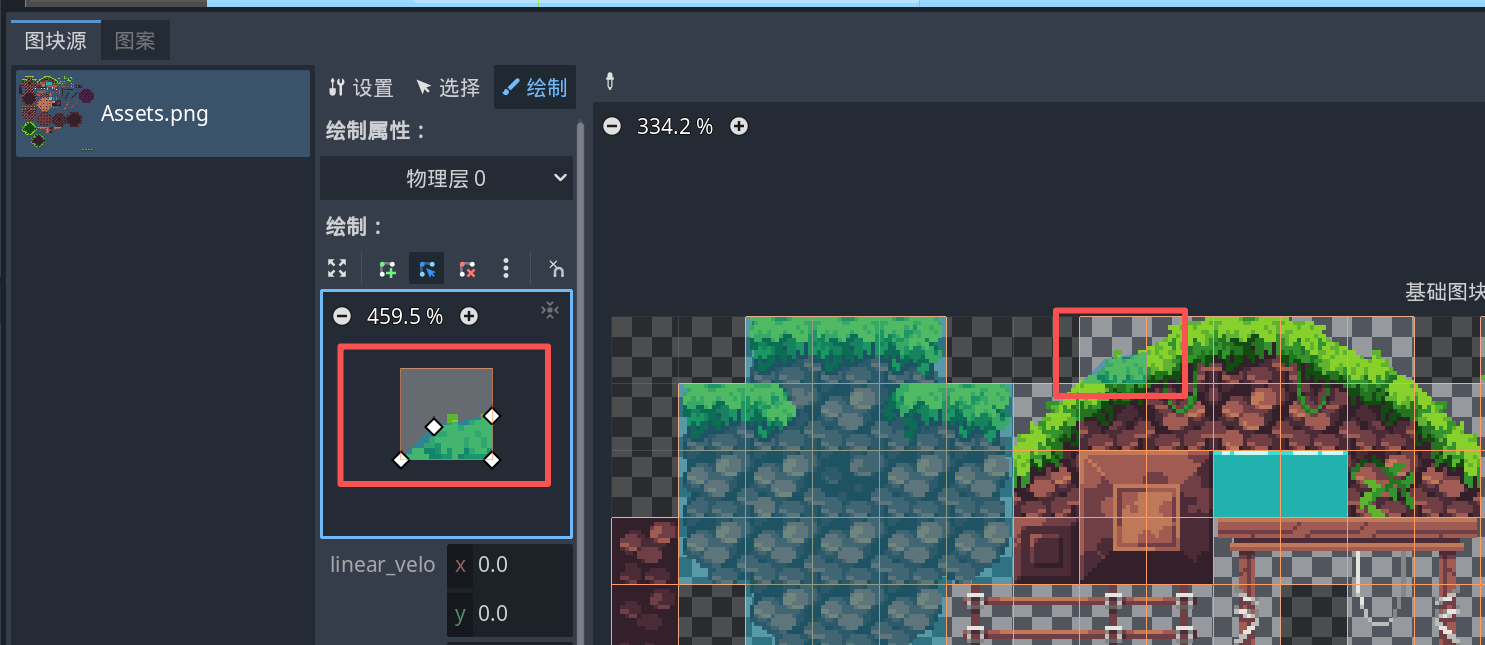
左边的碰撞体形状,可以看到被调整了,最初有四个点,可以拖动点更改形状,也可以点击线的边缘
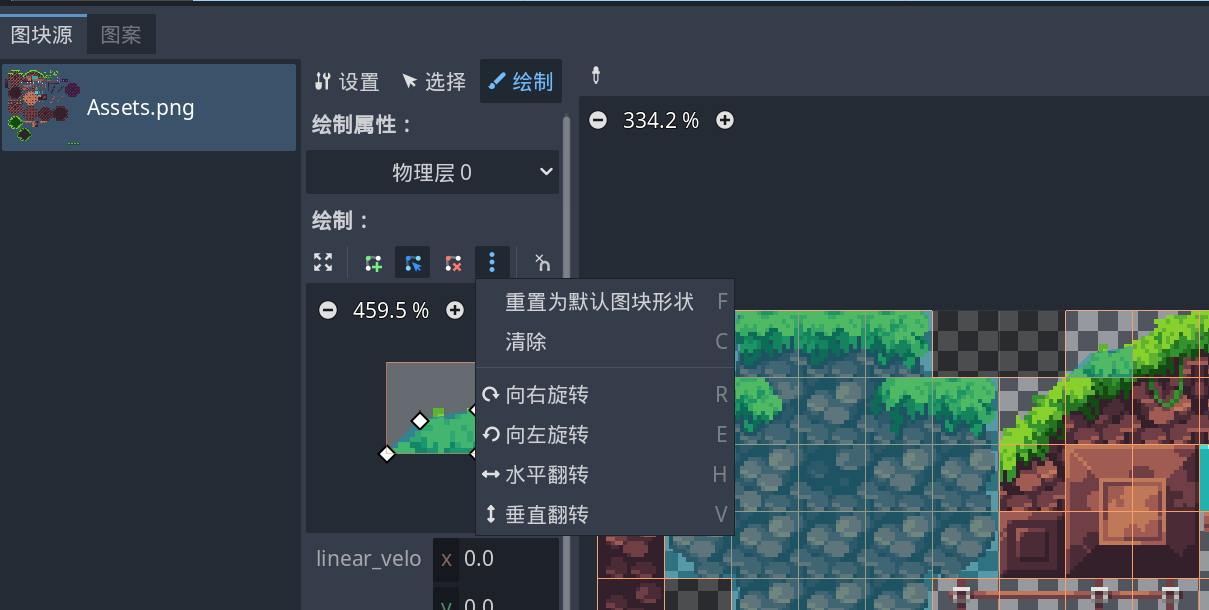
鼠标左键添加点鼠标右键删除点,如果需要恢复形状,点击竖排的三个点,有一个重置为默认图块形状
按照如上我们依次设置好我们的斜坡
绘制图块
按照如上,我们简单的给图块绘制了碰撞物理层,其他设定请参考别的资料,然后我们需要把图块绘制在场景中
首先,我们点击中下的
TileMap然后选择图块,确保在选择模式下进行绘制
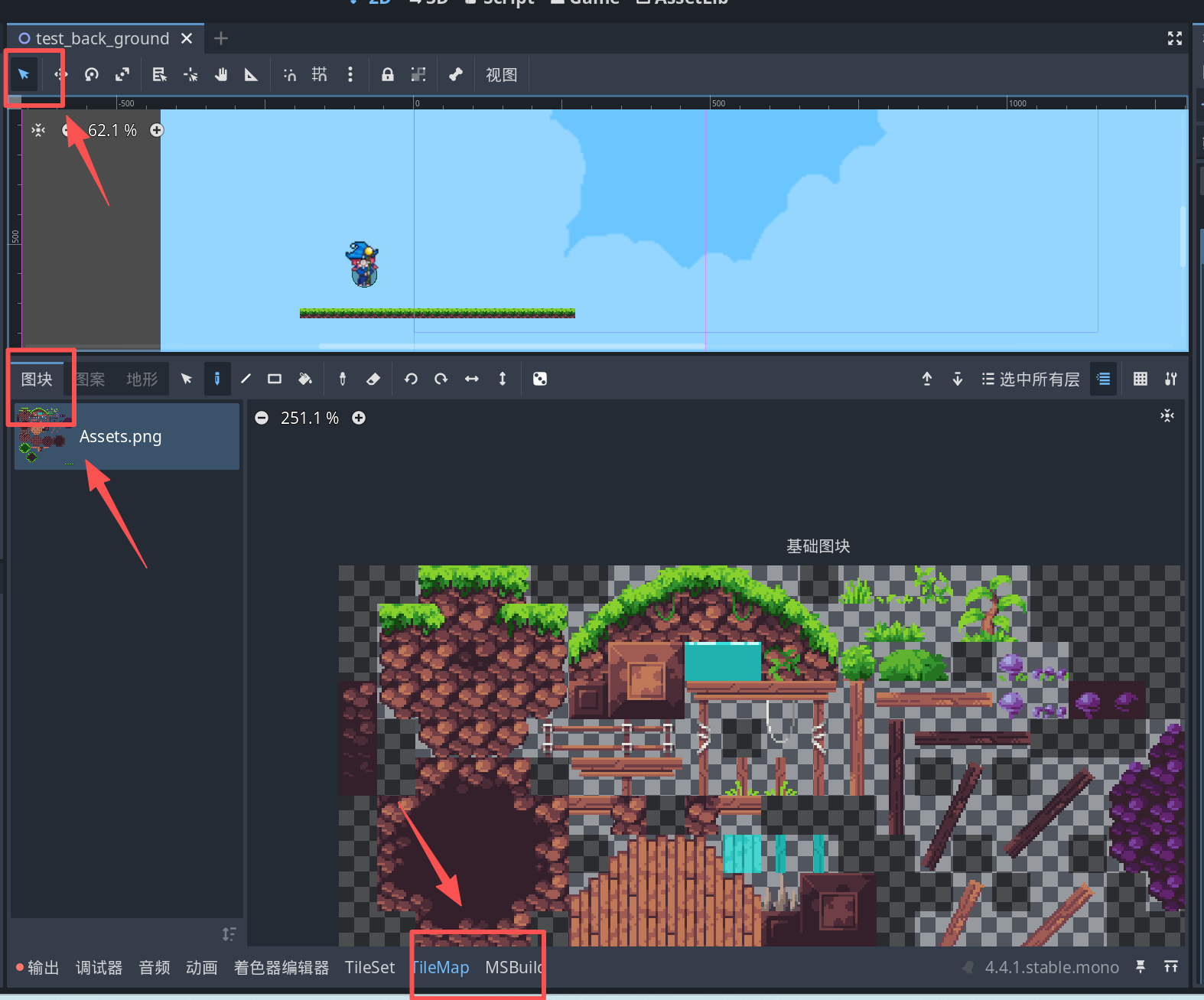
它这里上方有一排按钮,分别是
选择工具:针对已经绘制在场景的图块进行选中,并且移动绘制的位置
绘制工具将图块绘制在场景
直线工具:将设置好的图块进行选中,绘制成一条直线
矩形工具:在点击绘制工具的基础上,点击它,可以将选中的图块批量绘制成一个矩形,解决重复劳动效率低下问题
油漆桶工具:对连续接续的相同图块区域替换为选中的图块
取色:对已经绘制在场景的图块进行取色,下次绘制可以绘制和它一样的图块
橡皮擦:针对绘制在场景的图块进行删除,可以和矩形工具配合使用
其他功能不常用,就不多介绍。更具体,请参考其他资料
然后我对其进行一个简单绘制
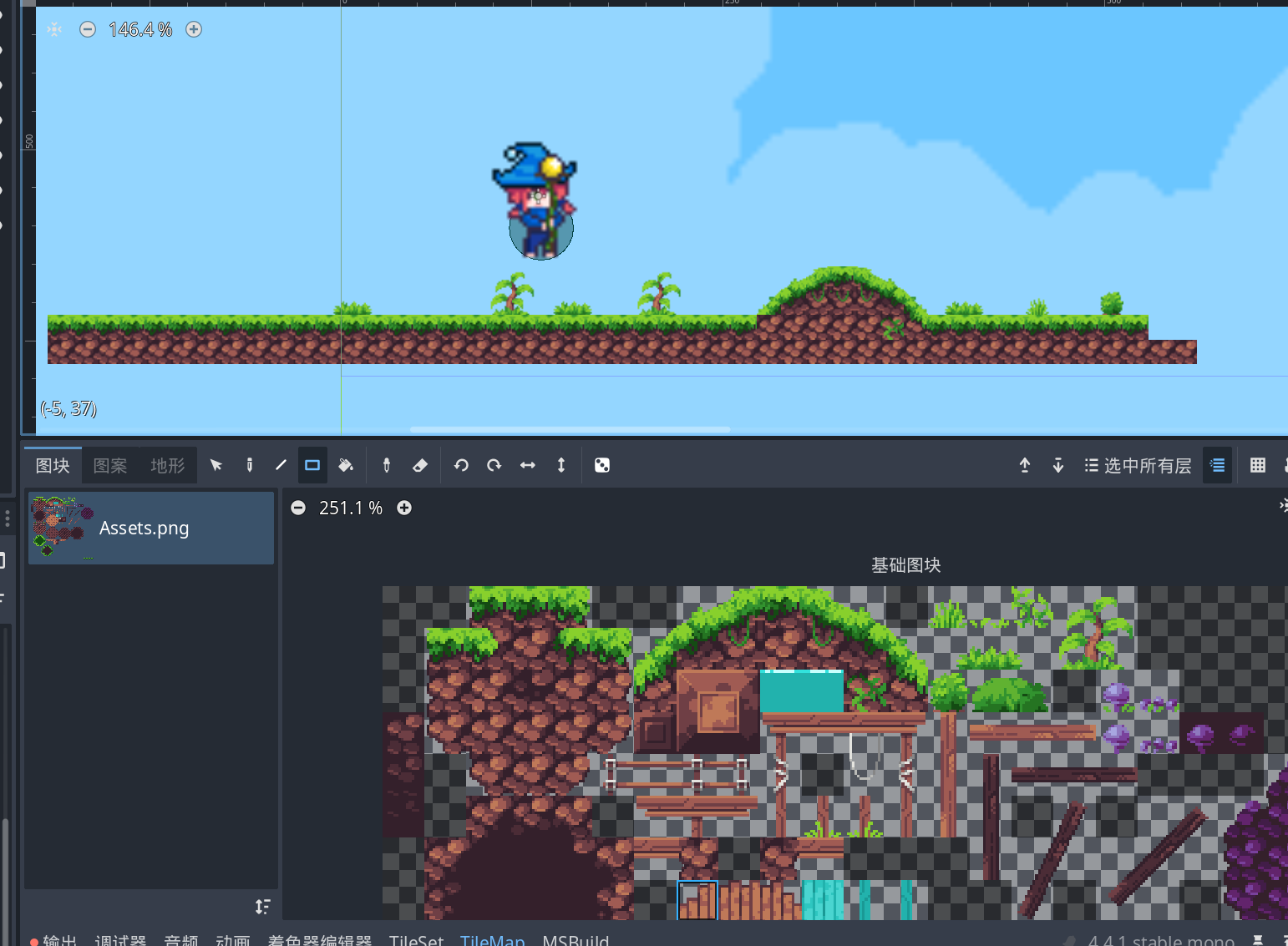
- 启动之后效果如下

可以看到未绘制物理碰撞的正常行走,有设置斜坡的也按照一定的坡度行走
结语
如上,就是使用godot实现tileMap的教学