3D视觉——求出目标物体在相机坐标系下的位姿信息
2D相机可以获取目标物体在图像中的像素坐标,如果高度一致的话,可以通过视野大小和分辨率计算出物体在图像中的物理坐标;或者通过九点标定/十二点标定获取目标在机器人坐标系下的XY坐标。
3D相机由于有深度信息,通过2D-3D公式(https://blog.csdn.net/qq_45445740/article/details/142931046)可以获取每个点实际物理坐标即位置信息,那如何表示这个物体的姿态信息呢?
目录
- 1.齐次矩阵
- 2.如何计算目标物体在相机坐标系下的位姿信息
-
- 思路解析
- 示例
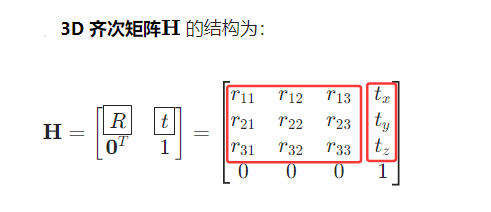
1.齐次矩阵
齐次矩阵的本质是 “维度扩展工具”,通过增加 1 个维度,可以表示一个点在空间的中位姿描述,假设空间中一个目标的位置信息是t(x,y,z),姿态信息是R(rx,ry,rz),将姿态信息的欧拉角转为旋转矩阵(3x3),拼接为齐次矩阵(4x4)。
2.如何计算目标物体在相机坐标系下的位姿信息
思路解析
- 关于齐次矩阵
上章介绍了齐次矩阵是R+t