USBL与DVL数据融合的实时定位系统,MATLAB仿真
超短基线(USBL)和多普勒速度计(DVL)是常用的水下定位技术,但单一技术难以应对复杂环境。本文介绍USBL与DVL的数据融合,构建实时定位系统,成为重要研究方向
在USBL与IMU融合的基础上面改进
文章目录
- 引言
- USBL与DVL技术概述
- 超短基线(USBL)
- 多普勒速度计(DVL)
- 数据融合的必要性
- 优势分析
- 研究课题建议
- USBL与DVL数据融合算法研究
- 创新点解析
- 运行结果
- 结论
引言
在现代海洋探测与研究中,准确的定位技术是成功实施深海探测、海洋工程和水下机器人操作的基础。超短基线(USBL)和多普勒速度计(DVL)是两种常用的水下定位技术,分别通过声学信号和水流速度来实现定位。然而,单一技术往往难以应对复杂的水下环境。因此,将USBL与DVL进行数据融合,构建实时定位系统,成为一个重要的研究方向。本课题旨在探讨如何通过数据融合技术提高水下定位的准确性和可靠性,以适应未来的海洋探测需求。
USBL与DVL技术概述
超短基线(USBL)
USBL是一种基于声学信号的定位技术,通常用于测量水下设备与水面基站之间的相对位置。其工作原理是通过声波传播时间和相位差计算目标位置。USBL在许多应用中表现良好,但其精度受到环境噪声、声速变化和水流影响的制约。
多普勒速度计(DVL)
DVL通过测量水下设备相对于水体的速度来估算其位置。DVL利用多普勒效应,通过发射声波并接收回波,计算水下设备的速度。尽管DVL在动态环境中表现出色,但它也面临水流干扰、传感器偏差和系统漂移等挑战。
数据融合的必要性
在深海探测中,单一传感器的数据常常无法提供足够的精度和可靠性。通过将USBL和DVL的数据进行融合,可以充分发挥两者的优势,抵消各自的不足之处,从而提高定位系统的整体性能。
优势分析
- 提高定位精度:融合USBL的相对定位能力和DVL的速度测量优势,可以实现更精确的实时定位。
- 增强系统鲁棒性:在不良环境条件下,数据融合可以降低单一传感器故障带来的影响,提高系统的稳定性。
- 实时反馈:通过融合技术,能够实时更新定位信息,适应动态变化的复杂水域环境。
研究课题建议
USBL与DVL数据融合算法研究
开发高效的数据融合算法,如卡尔曼滤波、粒子滤波等,结合USBL和DVL的数据进行实时定位。研究如何处理不同传感器数据的时间延迟和误差,提高融合结果的精度。
创新点解析
- 自适应滤波器:通过实时更新滤波器参数,使得系统能够动态适应环境变化,提高定位精度。
- 多模型融合策略:结合不同模型的优缺点,构建多模型融合系统,提升定位的鲁棒性和适应性。
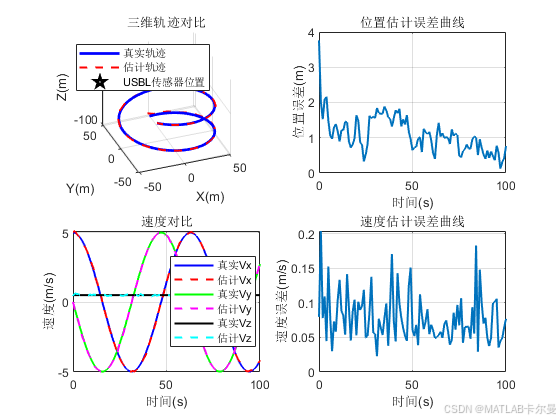
运行结果
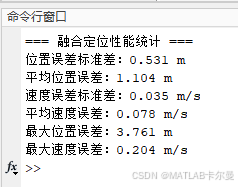
结论
6个观测量:
USBL的(θ, φ, r)+ DVL的(vx, vy, vz)
DVL速度测量:
DVL速度噪声参数(sigma_vx, sigma_vy, sigma_vz)
Jacobian矩阵扩展:
从3×6矩阵扩展为6×6矩阵
前3行对应USBL观测的偏导数
后3行对应DVL速度观测(对角线为1)
观测噪声矩阵R:
扩展为6×6对角矩阵
包含USBL和DVL的噪声方差
融合优势:
USBL提供绝对位置信息,防止累积漂移
DVL提供高精度速度测量,改善动态跟踪性能
组合实现了位置和速度的同步优化估计
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者