python opencv 调用 海康威视工业相机(又全又细又简洁)
1.准备工作
准备一个海康相机

下载MVS 和SDK
2.python MVS示例
(说明:MVS里有很多python示例,可以直接运行,但没有用opencv)
下载完MVS后,我们打开路径安装路径
我的:
D:\soft\MVS\MVS\Development\Samples\Python\BasicDemo
D:\soft\MVS\MVS\Development\Samples\Python\MvImport
可以看到有很多现成的示例。
我们借用一下"D:\soft\MVS\MVS\Development\Samples\Python\BasicDemo\BasicDemo.py"
创建 python项目test_HKcamera
复制BasicDemo.py
发现一片红,
我们把
D:\soft\MVS\MVS\Development\Samples\Python\BasicDemo
D:\soft\MVS\MVS\Development\Samples\Python\MvImport
里面的文件都复制过来
复制后,如图所示:
运行后:
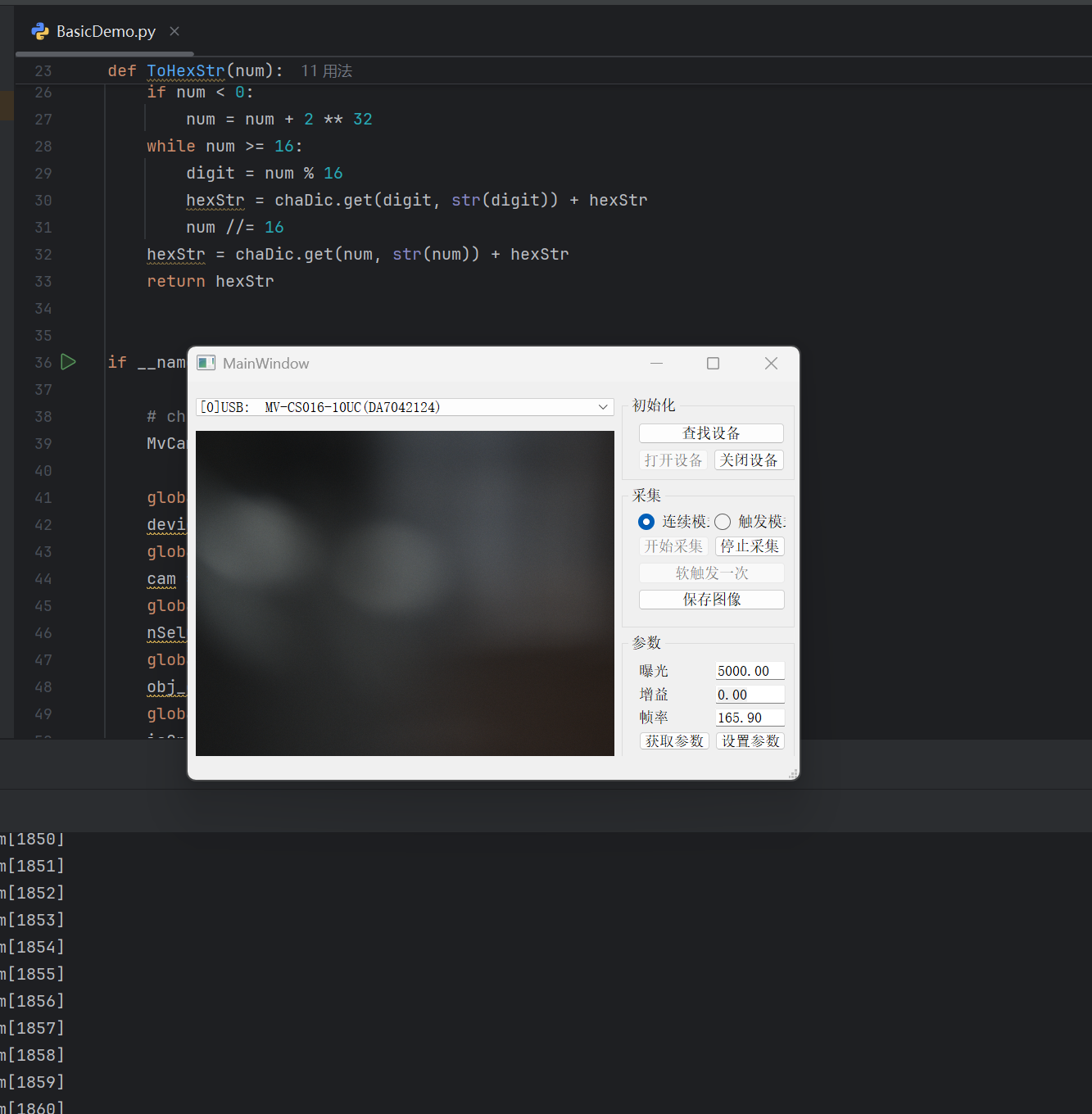
成功输出画面。
3. python opencv 调用
创建test_HKcamera_opencv文件夹
创建test_hk_opecv.py文件
把第二节的文件复制进来
如图:
test_hk_opecv.py完整代码如下:
import cv2
import numpy as np
from MvCameraControl_class import *
from CameraParams_header import *#-------------------opencv操作部分--------------------------------------
def opencv_action(img):#自己定义操作result_img = imgreturn result_img#-----------------------海康相机设置部分---------------------------------------ret = MvCamera.MV_CC_Initialize()
if ret != 0:print(f"初始化SDK失败,错误码: {ret}")exit()# 枚举设备
deviceList = MV_CC_DEVICE_INFO_LIST()
n_layer_type = MV_GIGE_DEVICE | MV_USB_DEVICE | MV_GENTL_CAMERALINK_DEVICE
ret = MvCamera.MV_CC_EnumDevices(n_layer_type, deviceList)
if ret != 0:print("枚举设备失败")exit()print(f"找到 {deviceList.nDeviceNum} 台设备")
if deviceList.nDeviceNum == 0:exit()stDeviceList = cast(deviceList.pDeviceInfo[0], POINTER(MV_CC_DEVICE_INFO)).contentscamera = MvCamera()ret = camera.MV_CC_CreateHandle(stDeviceList)# 打开设备(使用已创建的句柄)
ret = camera.MV_CC_OpenDevice()
if ret != 0:print(f"打开设备失败,错误码: {ret}")exit()# 获取相机参数
width = c_uint()
height = c_uint()
pixel_format = c_uint()
payload_size = c_uint()
stParam = MVCC_INTVALUE()ret = camera.MV_CC_GetIntValue("PayloadSize", stParam)
if ret != 0:print(f"获取PayloadSize失败,错误码: {ret}")exit()
payload_size.value = stParam.nCurValue# 获取宽度
ret = camera.MV_CC_GetIntValue("Width", stParam)
if ret != 0:print(f"获取宽度失败,错误码: {ret}")exit()
width.value = stParam.nCurValue# 获取高度
ret = camera.MV_CC_GetIntValue("Height", stParam)
if ret != 0:print(f"获取高度失败,错误码: {ret}")exit()
height.value = stParam.nCurValueprint(width.value,height.value)pixel_format.value = 17301505 # RGB8
# 或
#pixel_format.value = 17301514 # Mono8#曝光时间
exposure_time = 15000 # 单位:微秒
ret = camera.MV_CC_SetFloatValue("ExposureTime", exposure_time)# 开始抓图
ret = camera.MV_CC_StartGrabbing()
if ret != 0:print(f"开始抓图失败,错误码: {ret}")exit()# 分配缓冲区
data_buf = (c_ubyte * payload_size.value)()
data_size = c_uint(payload_size.value)stFrameInfo = MV_FRAME_OUT_INFO_EX()#-----------------------------------------------运行部分---------------------------# 创建OpenCV窗口
cv2.namedWindow("Camera", cv2.WINDOW_NORMAL)try:while True:data_buf = (c_ubyte * payload_size.value)()ret = camera.MV_CC_GetOneFrameTimeout(byref(data_buf),payload_size.value,stFrameInfo,1000)if ret == 0:#print(f"获取到帧: 宽度={stFrameInfo.nWidth}, 高度={stFrameInfo.nHeight}, "f"像素格式={stFrameInfo.enPixelType}, 帧大小={stFrameInfo.nFrameLen}")frame = np.frombuffer(data_buf, dtype=np.uint8)actual_width = stFrameInfo.nWidthactual_height = stFrameInfo.nHeightif stFrameInfo.enPixelType == 17301505: # RGB8expected_size = actual_width * actual_height * 3if len(frame) != expected_size:print(f"数据大小不匹配: 期望 {expected_size}, 实际 {len(frame)}")continueframe = frame.reshape((actual_height, actual_width, 3))frame = cv2.cvtColor(frame, cv2.COLOR_RGB2BGR)elif stFrameInfo.enPixelType == 17301514: # Mono8expected_size = actual_width * actual_heightif len(frame) != expected_size:print(f"数据大小不匹配: 期望 {expected_size}, 实际 {len(frame)}")continueframe = frame.reshape((actual_height, actual_width))elif stFrameInfo.enPixelType == 17301513: # 可能是 Bayer 格式expected_size = actual_width * actual_heightif len(frame) != expected_size:print(f"数据大小不匹配: 期望 {expected_size}, 实际 {len(frame)}")continueframe = frame.reshape((actual_height, actual_width))frame = cv2.cvtColor(frame, cv2.COLOR_BayerGB2BGR)frame = opencv_action(frame)else:print(f"不支持的像素格式: {stFrameInfo.enPixelType}")breakcv2.imshow("Camera", frame)if cv2.waitKey(1) & 0xFF == ord("q"):breakelse:print(f"获取图像失败,错误码: {ret}")breakfinally:# 停止抓图camera.MV_CC_StopGrabbing()# 关闭设备camera.MV_CC_CloseDevice()# 销毁句柄camera.MV_CC_DestroyHandle()# 销毁窗口cv2.destroyAllWindows()
完整代码如下:
通过网盘分享的文件:py_opencv_HK
链接:https://pan.baidu.com/s/1DmrVSV1LT9zGBCRx3nIKAQ
提取码: usii
4.花絮
不知道哪个教程教的=-=
# 创建设备句柄handle = c_void_p()stDeviceList = cast(deviceList.pDeviceInfo[0], POINTER(MV_CC_DEVICE_INFO)).contents# 创建相机实例并调用方法(关键修正点)
camera = MvCamera() # 实例化 MvCamera 类#方法一:
ret = camera.MV_CC_CreateHandle(stDeviceList)
#报错:TypeError: MvCamera.MV_CC_GetIntValue() takes 3 positional arguments but 4 were given#方法二:
#ret = MvCamera.MV_CC_CreateHandle(byref(handle), stDeviceList)
#报错AttributeError: '_ctypes.CArgObject' object has no attribute 'handle'#方法三:
#ret = MvCamera.MV_CC_CreateHandle(byref(stDeviceList))
#报错TypeError: MvCamera.MV_CC_CreateHandle() missing 1 required positional argument: 'stDevInfo'#方法四:
#ret = camera.MV_CC_OpenDevice(byref(handle),byref(stDeviceList))
#报错TypeError: MvCamera.MV_CC_CreateHandle() missing 1 required positional argument: 'stDevInfo'# 打开设备(使用已创建的句柄)
ret = MvCamera.MV_CC_OpenDevice(handle)
if ret != 0:print(f"打开设备失败,错误码: {ret}")exit()
创建
handle = c_void_p()
就疯狂报错。