ESP8266与CEM5826-M11毫米波雷达传感器的动态检测系统
一、项目概述
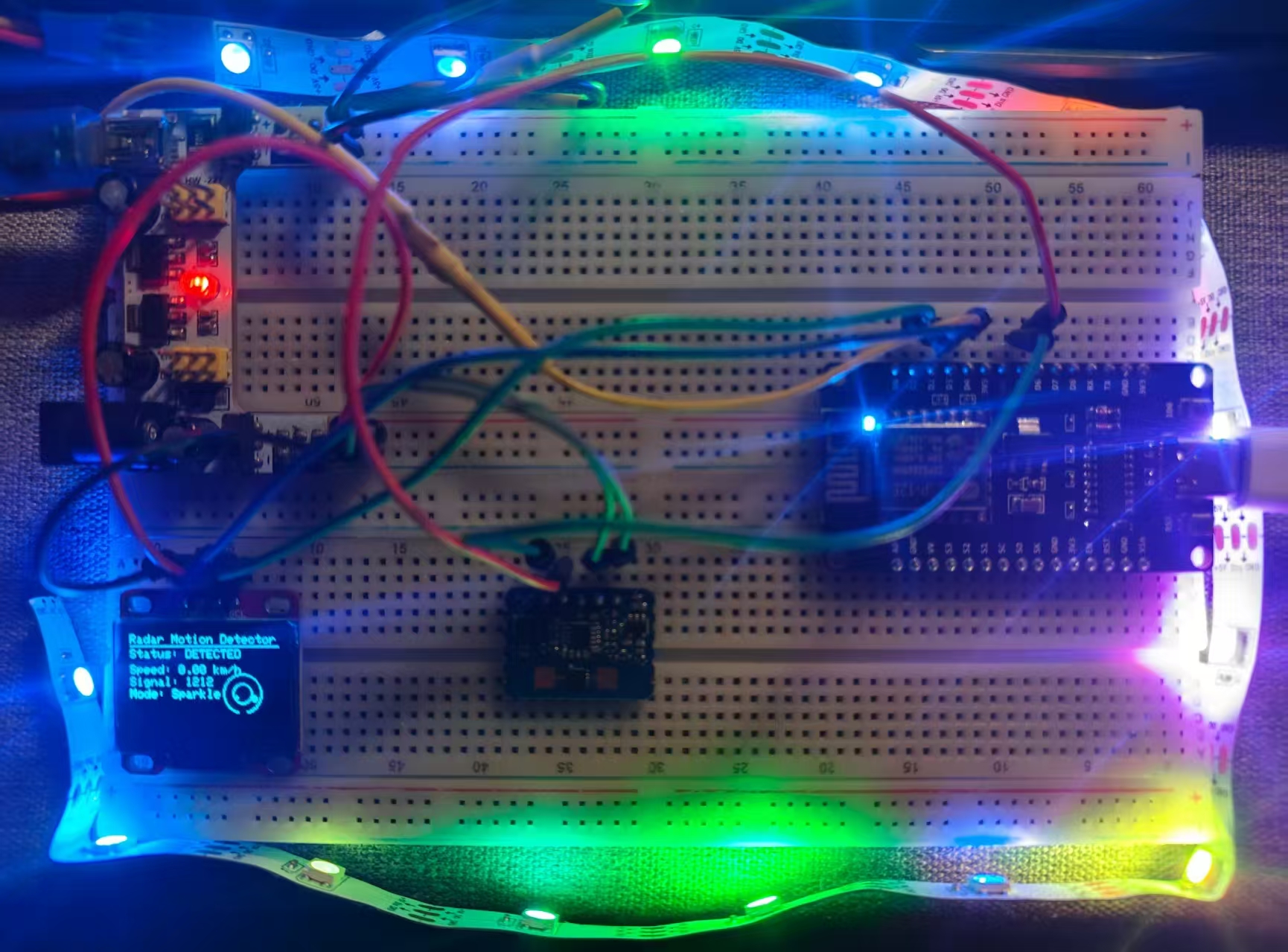
毫米波雷达技术作为一种新兴的存在检测手段,相比传统PIR传感器具有穿透性强、抗干扰能力高等优势。本文将详细介绍一套基于ESP8266微控制器与CEM5826-M11 24GHz毫米波雷达传感器的动态检测系统,该系统不仅能够准确检测人体存在与移动速度,还通过OLED显示屏实时反馈数据,并利用可编程LED灯带提供直观的视觉效果。
本系统特色:
- 采用24GHz毫米波雷达,可透过非金属材料检测
- 实时显示移动速度与信号强度
- 六种动态LED灯光效果,根据检测状态自动调整
- 低功耗设计,适合长期部署
二、硬件组成详解
核心组件:
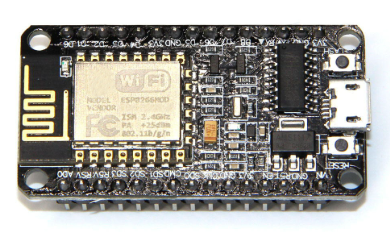
1、NodeMCU ESP8266
- 处理器:Tensilica L106 32位RISC
- 主频:80MHz(可超频至160MHz)
- 内存:4MB Flash,约80KB可用RAM
- 通信:内置WiFi(本项目暂未使用网络功能)
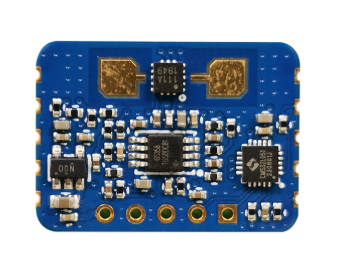
2、CEM5826-M11 24GHz毫米波雷达传感器
- 工作频率:24GHz(K波段)
- 检测范围:0.2~12米(可调)
- 检测角度:水平80°,垂直40°
- 接口:UART(115200波特率)
- 供电:5V DC
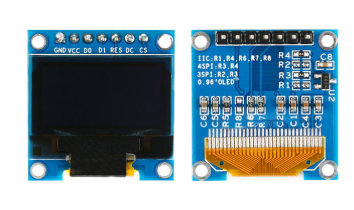
3、0.96英寸OLED显示屏
- 分辨率:128×64像素
- 通信协议:I2C
- 控制芯片:SSD1306
- 供电:3.3V
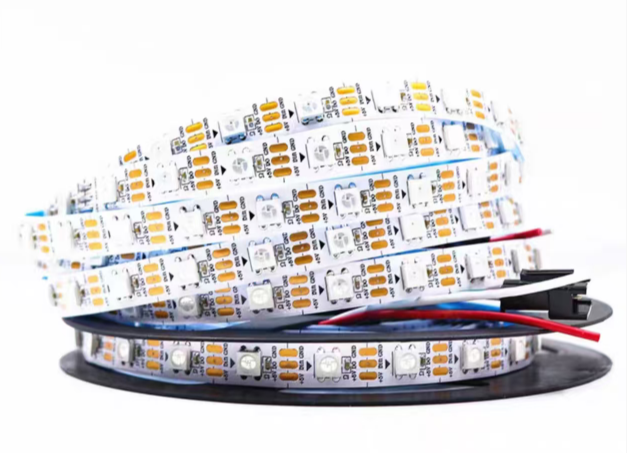
4、WS2812B可寻址RGB LED灯带
- LED数量:15颗
- 通信:单线数据传输
- 供电:5V DC
其他配件:
- 面包板:用于原型开发
- 跳线若干:连接各组件
- 电源适配器:5V/2A(确保LED灯带有足够电流)
各硬件组件展示
三、CEM5826-M11雷达传感器原理
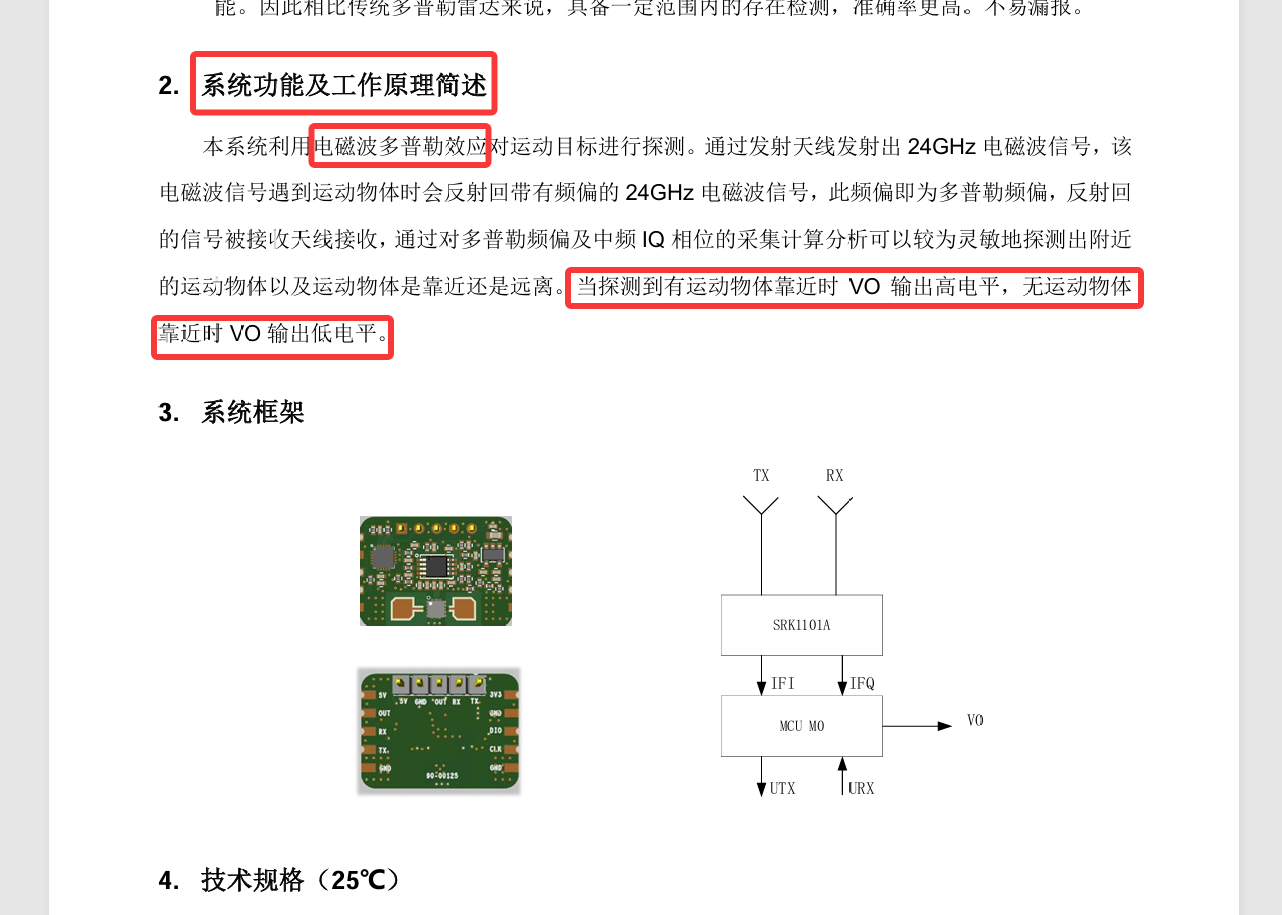
CEM5826-M11采用24GHz毫米波雷达技术,基于多普勒效应进行运动检测。其工作原理如下:
发射信号:传感器持续发射24GHz频率的电磁波
接收反射:当电磁波遇到移动物体时,反射回传感器
频率分析:通过分析反射波的频率偏移(多普勒效应)计算运动速度
信号处理:内部DSP处理算法过滤干扰,提高检测可靠性
与传统PIR(被动红外)传感器相比,毫米波雷达具有以下优势:
- 可穿透非金属材料(如塑料、薄木板、玻璃等)
- 不受环境温度影响,稳定性高
- 可提供运动物体的速度数据
- 检测范围更大,方向性更好
CEM5826-M11通过UART接口以115200波特率输出数据,典型数据格式为:
1, km/h, v=1.62, str=63
其中:
- v=1.62表示检测到的移动速度为1.62 km/h
- str=63表示信号强度为63(满值100)
[雷达传感器工作原理] --- 更多请参考萤火工场 CEM5826-M11 24GHz 毫米波雷达模块规格书(可点击跳转自行下载)
四、系统连接方式
接线详图:
1、OLED显示屏连接:
- SDA → D2 (GPIO4)
- SCL → D1 (GPIO5)
- VCC → 3.3V
- GND → GND
2、LED灯带连接:
- DO(数据) → D4 (GPIO2)
- VCC → 5V
- GND → GND
3、CEM5826-M11雷达传感器连接:
- TX → D5 (GPIO14)
- RX → D6 (GPIO12)
- VCC → 5V
- GND → GND
注意事项:
- 雷达传感器的TX连接到ESP8266的D5(RX),RX连接到D6(TX),需要交叉连接
- LED灯带可能需要额外的电源供应,若灯珠数量多时,不建议直接从ESP8266供电
- 确保所有组件共地,避免信号干扰
五、完整代码
/** ESP8266 雷达动态检测系统 - 使用CEM5826-M11传感器* * 硬件组成:* - ESP8266 NODE MCU* - 0.96" OLED 显示屏 (I2C)* - WS2812B LED灯带 (15颗LED)* - CEM5826-M11 24GHz毫米波雷达传感器* * 连接方式:* - OLED: SDA -> D2, SCL -> D1, VCC -> 3.3V, GND -> GND* - LED灯带: DO -> D4, VCC -> 5V, GND -> GND* - CEM5826-M11: TX -> D5, RX -> D6, VCC -> 5V, GND -> GND*/#include <Wire.h>
#include <Adafruit_GFX.h>
#include <Adafruit_SSD1306.h>
#include <Adafruit_NeoPixel.h>
#include <SoftwareSerial.h>
#include <math.h>// OLED显示屏配置
#define SCREEN_WIDTH 128
#define SCREEN_HEIGHT 64
#define OLED_RESET -1 // 4针OLED不使用重置针脚
Adafruit_SSD1306 display(SCREEN_WIDTH, SCREEN_HEIGHT, &Wire, OLED_RESET);// LED灯带配置
#define LED_PIN D4
#define LED_COUNT 15
Adafruit_NeoPixel strip(LED_COUNT, LED_PIN, NEO_GRB + NEO_KHZ800);// CEM5826-M11传感器配置
#define RADAR_RX D5 // 连接到CEM5826-M11的TX
#define RADAR_TX D6 // 连接到CEM5826-M11的RX(如需将来使用)
SoftwareSerial radarSerial(RADAR_RX, RADAR_TX); // RX, TX// 雷达检测数据结构体
struct RadarData {bool presence; // 是否检测到存在float velocity; // 移动物体的速度 (km/h)int signal; // 信号强度unsigned long lastUpdateTime; // 最后更新时间
};RadarData radarData = {false, 0.0, 0, 0};
String receivedString = "";
bool newDataReceived = false;// 显示刷新计时器
unsigned long lastDisplayUpdate = 0;
const unsigned long DISPLAY_UPDATE_INTERVAL = 250; // 250ms (每秒刷新4次)// LED动画变量
unsigned long lastLedUpdate = 0;
const unsigned long LED_UPDATE_INTERVAL = 25; // 25ms (每秒更新40次) - 更快以获得更动态的效果
int animationStep = 0;
int animationMode = 0;
unsigned long lastModeChange = 0;
const unsigned long MODE_CHANGE_INTERVAL = 5000; // 每5秒更改一次动画模式// 派对模式的颜色调色板
uint32_t partyColors[] = {strip.Color(255, 0, 0), // 红色strip.Color(255, 127, 0), // 橙色strip.Color(255, 255, 0), // 黄色strip.Color(0, 255, 0), // 绿色strip.Color(0, 0, 255), // 蓝色strip.Color(75, 0, 130), // 靛蓝strip.Color(148, 0, 211), // 紫罗兰strip.Color(255, 0, 255), // 洋红strip.Color(0, 255, 255), // 青色strip.Color(255, 105, 180), // 热粉色strip.Color(255, 20, 147), // 深粉色strip.Color(255, 215, 0), // 金色strip.Color(138, 43, 226) // 紫色
};
const int NUM_PARTY_COLORS = sizeof(partyColors) / sizeof(partyColors[0]);void setup() {// 初始化串口调试Serial.begin(115200);Serial.println("雷达动态检测器启动中...");// 初始化雷达串口radarSerial.begin(115200);// 初始化OLED显示屏Wire.begin(D2, D1); // SDA, SCLif (!display.begin(SSD1306_SWITCHCAPVCC, 0x3C)) {Serial.println(F("SSD1306分配失败"));for(;;); // 停止执行,无限循环}display.clearDisplay();display.setTextColor(WHITE);display.setTextSize(1);display.setCursor(0, 0);display.println("Radar Motion Detector");display.println("Initializing...");display.display();// 初始化LED灯带strip.begin();strip.show(); // 初始化所有像素为'关闭'状态// 启动动画 - 彩虹效果for(int j = 0; j < 256; j += 8) {for(int i = 0; i < strip.numPixels(); i++) {strip.setPixelColor(i, Wheel((i + j) & 255));}strip.show();delay(20);}// 清除LEDsfor(int i = 0; i < strip.numPixels(); i++) {strip.setPixelColor(i, strip.Color(0, 0, 0));strip.show();delay(30);}
}void loop() {unsigned long currentTime = millis();// 从雷达传感器读取数据readRadarData();// 定期更新显示if (currentTime - lastDisplayUpdate >= DISPLAY_UPDATE_INTERVAL) {updateDisplay();lastDisplayUpdate = currentTime;}// 定期更新LED动画if (currentTime - lastLedUpdate >= LED_UPDATE_INTERVAL) {updateLEDs(currentTime);lastLedUpdate = currentTime;}// 当检测到移动时偶尔更改动画模式if (radarData.presence && currentTime - lastModeChange >= MODE_CHANGE_INTERVAL) {// 基于速度改变模式if (radarData.velocity > 3.0) {animationMode = random(0, 6); // 选择一个随机动画模式lastModeChange = currentTime;}}
}void readRadarData() {// 检查是否有来自传感器的数据while (radarSerial.available() > 0) {char inChar = radarSerial.read();// 收集字符直至换行符if (inChar != '\n') {receivedString += inChar;} else {// 处理完整行parseRadarData(receivedString);receivedString = ""; // 清除字符串以便下次读取newDataReceived = true;}}// 如果3秒内未收到数据,假设无存在if (millis() - radarData.lastUpdateTime > 3000) {if (radarData.presence) {radarData.presence = false;radarData.velocity = 0.0;radarData.signal = 0;newDataReceived = true;}}
}void parseRadarData(String data) {// 示例数据格式: "1, km/h, v=1.62, str=63"Serial.print("接收到的数据: ");Serial.println(data);// 解析速度值int vPos = data.indexOf("v=");int strPos = data.indexOf("str=");if (vPos > 0 && strPos > 0) {// 提取速度String velocityStr = data.substring(vPos + 2, strPos - 2);radarData.velocity = velocityStr.toFloat();// 提取信号强度String signalStr = data.substring(strPos + 4);radarData.signal = signalStr.toInt();// 更新存在状态和时间戳radarData.presence = (radarData.signal > 0);radarData.lastUpdateTime = millis();Serial.print("速度: "); Serial.print(radarData.velocity); Serial.println(" km/h");Serial.print("信号强度: "); Serial.println(radarData.signal);Serial.print("检测到存在: "); Serial.println(radarData.presence ? "是" : "否");}
}void updateDisplay() {display.clearDisplay();display.setTextSize(1);// 标题display.setCursor(0, 0);display.println("Radar Motion Detector");display.drawLine(0, 9, display.width(), 9, WHITE);// 检测状态display.setCursor(0, 12);display.setTextSize(1);display.print("Status: ");if (radarData.presence) {display.setTextSize(1);display.println("DETECTED");} else {display.setTextSize(1);display.println("NO DETECTION");}// 速度和信号强度display.setTextSize(1);display.setCursor(0, 25);display.print("Speed: ");display.print(radarData.velocity, 2);display.println(" km/h");display.setCursor(0, 35);display.print("Signal: ");display.println(radarData.signal);// 显示当前动画模式display.setCursor(0, 45);display.print("Mode: ");switch(animationMode) {case 0: display.println("Rainbow"); break;case 1: display.println("Pulse"); break;case 2: display.println("Comet"); break;case 3: display.println("Strobe"); break;case 4: display.println("Fire"); break;case 5: display.println("Sparkle"); break;default: display.println("Default");}// 绘制简单的雷达动画int centerX = 96;int centerY = 48;int radius = 16;display.drawCircle(centerX, centerY, radius, WHITE);display.drawCircle(centerX, centerY, radius/2, WHITE);if (radarData.presence) {// 当检测到存在时在雷达上绘制一些"点"float angle = (millis() % 3600) / 10.0; // 0-360度int blipX = centerX + (int)(radius * 0.7 * cos(angle * PI / 180));int blipY = centerY + (int)(radius * 0.7 * sin(angle * PI / 180));display.fillCircle(blipX, blipY, 2, WHITE);int blipX2 = centerX + (int)(radius * 0.4 * cos((angle + 120) * PI / 180));int blipY2 = centerY + (int)(radius * 0.4 * sin((angle + 120) * PI / 180));display.fillCircle(blipX2, blipY2, 1, WHITE);}display.display();
}void updateLEDs(unsigned long currentTime) {animationStep = (animationStep + 1) % 256;if (radarData.presence) {// 基于速度和信号强度选择动画模式float intensity = map(radarData.signal, 0, 100, 0, 255) / 255.0;float speed = constrain(radarData.velocity / 10.0, 0.1, 1.0);switch (animationMode) {case 0:rainbowAnimation(speed);break;case 1:pulseAnimation(speed, intensity);break;case 2:cometAnimation(speed, intensity);break;case 3:strobeAnimation(speed, intensity);break;case 4:fireAnimation(speed, intensity);break;case 5:sparkleAnimation(speed, intensity);break;default:rainbowAnimation(speed);}} else {// 未检测到运动 - 温和的颜色循环效果int brightness = sin(animationStep * PI / 128) * 40 + 20; // 呼吸效果 20-60亮度for(int i = 0; i < strip.numPixels(); i++) {strip.setPixelColor(i, strip.Color(0, 0, brightness));}strip.show();}
}// 在所有LED上生成彩虹颜色
void rainbowAnimation(float speed) {int speedFactor = 256 - (speed * 200); // 速度越高 = 动画越快for(int i = 0; i < strip.numPixels(); i++) {int pixelHue = (i * 256 / strip.numPixels() + (millis() / speedFactor)) % 256;strip.setPixelColor(i, Wheel(pixelHue));}strip.show();
}// 所有LED一起脉动,颜色基于速度
void pulseAnimation(float speed, float intensity) {float pulse = sin((millis() * speed * 0.01) * PI) * 0.5 + 0.5; // 0.0-1.0int brightness = pulse * 255 * intensity;for(int i = 0; i < strip.numPixels(); i++) {// 基于速度选择颜色int hue = (millis() / 50) % 256; // 循环颜色uint32_t color = Wheel(hue);// 应用亮度uint8_t r = ((color >> 16) & 0xFF) * brightness / 255;uint8_t g = ((color >> 8) & 0xFF) * brightness / 255;uint8_t b = (color & 0xFF) * brightness / 255;strip.setPixelColor(i, strip.Color(r, g, b));}strip.show();
}// 移动彗星效果
void cometAnimation(float speed, float intensity) {fadeToBlack(80); // 留下尾迹// 计算"彗星头"的位置float pos = fmod((millis() * speed * 0.05), strip.numPixels() * 2);if (pos >= strip.numPixels()) pos = strip.numPixels() * 2 - pos;// 基于时间选择颜色int hue = (millis() / 100) % 256;uint32_t color = Wheel(hue);// 在彗星头处设置最亮的像素int brightestPixel = (int)pos;strip.setPixelColor(brightestPixel, color);// 创建梯度尾迹for(int i = 1; i < 5; i++) {if(brightestPixel - i >= 0) {uint8_t r = ((color >> 16) & 0xFF) * (5 - i) / 5 * intensity;uint8_t g = ((color >> 8) & 0xFF) * (5 - i) / 5 * intensity;uint8_t b = (color & 0xFF) * (5 - i) / 5 * intensity;strip.setPixelColor(brightestPixel - i, strip.Color(r, g, b));}}strip.show();
}// 频闪效果(闪烁)
void strobeAnimation(float speed, float intensity) {int flashSpeed = 100 - speed * 80; // 速度越高 = 闪烁越快if (millis() % flashSpeed < flashSpeed / 2) {// 闪亮 - 从派对颜色中随机选择int colorIndex = random(0, NUM_PARTY_COLORS);uint32_t color = partyColors[colorIndex];for(int i = 0; i < strip.numPixels(); i++) {strip.setPixelColor(i, color);}} else {// 闪灭for(int i = 0; i < strip.numPixels(); i++) {strip.setPixelColor(i, strip.Color(0, 0, 0));}}strip.show();
}// 火焰效果模拟
void fireAnimation(float speed, float intensity) {int cooling = 55 + (1.0 - speed) * 100; // 火焰冷却速度int sparking = 120 * speed; // 新火花的几率// 每个LED的温度值数组static byte heat[LED_COUNT];// 步骤1. 冷却每个像素for(int i = 0; i < strip.numPixels(); i++) {int cooldown = random(0, ((cooling * 10) / strip.numPixels()) + 2);if(cooldown > heat[i]) {heat[i] = 0;} else {heat[i] = heat[i] - cooldown;}}// 步骤2. 热量上升 - 向上移动热量for(int i = strip.numPixels() - 1; i >= 2; i--) {heat[i] = (heat[i - 1] + heat[i - 2] + heat[i - 3]) / 3;}// 步骤3. 随机点燃新火花if(random(255) < sparking) {int y = random(strip.numPixels() / 3); // 火花出现在底部heat[y] = heat[y] + random(160, 255); // 随机强度// 防止溢出if(heat[y] > 255) heat[y] = 255;}// 步骤4. 将热量转换为LED颜色并设置像素for(int i = 0; i < strip.numPixels(); i++) {int pixelHeat = (int)(heat[i] * intensity);if(pixelHeat > 255) pixelHeat = 255;uint32_t color = HeatColor((byte)pixelHeat);strip.setPixelColor(i, color);}strip.show();
}// 随机闪烁效果
void sparkleAnimation(float speed, float intensity) {// 淡化现有像素fadeToBlack(90);// 基于速度添加新的随机闪烁int numSparkles = 1 + (speed * 4); // 每帧1-5个新闪烁for(int i = 0; i < numSparkles; i++) {int pos = random(strip.numPixels());int hue = random(256); // 随机颜色strip.setPixelColor(pos, Wheel(hue));}strip.show();
}// 创建彩虹颜色的辅助函数
uint32_t Wheel(byte WheelPos) {WheelPos = 255 - WheelPos;if(WheelPos < 85) {return strip.Color(255 - WheelPos * 3, 0, WheelPos * 3);}if(WheelPos < 170) {WheelPos -= 85;return strip.Color(0, WheelPos * 3, 255 - WheelPos * 3);}WheelPos -= 170;return strip.Color(WheelPos * 3, 255 - WheelPos * 3, 0);
}// 将热值(0-255)转换为RGB颜色,用于火焰效果
uint32_t HeatColor(byte temperature) {// 将'热量'从0-255缩放到0-191byte t192 = round((temperature/255.0) * 191);// 计算渐变byte heatramp = t192 & 0x3F; // 0..63heatramp <<= 2; // 缩放到0..252// 确定我们在光谱的哪一部分:if( t192 > 0x80) { // 最热return strip.Color(255, 255, heatramp);} else if( t192 > 0x40 ) { // 中等return strip.Color(255, heatramp, 0);} else { // 最冷return strip.Color(heatramp, 0, 0);}
}// 将所有像素淡化到黑色,按特定百分比
void fadeToBlack(byte fadeValue) {for(int i = 0; i < strip.numPixels(); i++) {uint32_t oldColor = strip.getPixelColor(i);uint8_t r = ((oldColor >> 16) & 0xFF) * fadeValue / 100;uint8_t g = ((oldColor >> 8) & 0xFF) * fadeValue / 100;uint8_t b = (oldColor & 0xFF) * fadeValue / 100;strip.setPixelColor(i, strip.Color(r, g, b));}
}六、代码详细解析
1. 初始化与配置
初始化部分负责设置所有硬件组件并准备系统运行:
void setup() {Serial.begin(115200); // 调试串口radarSerial.begin(115200); // 雷达串口Wire.begin(D2, D1); // I2C总线display.begin(SSD1306_SWITCHCAPVCC, 0x3C); // OLED显示屏strip.begin(); // LED灯带
}系统在启动时会执行一个彩虹动画,这既可以测试LED灯带功能,也能提供良好的视觉反馈表明系统已启动。
2. 主循环结构
主循环被设计为三个主要任务:
void loop() {unsigned long currentTime = millis();readRadarData(); // 任务1: 读取雷达数据// 任务2: 更新OLED显示(每250ms)if (currentTime - lastDisplayUpdate >= DISPLAY_UPDATE_INTERVAL) {updateDisplay();lastDisplayUpdate = currentTime;}// 任务3: 更新LED动画(每25ms)if (currentTime - lastLedUpdate >= LED_UPDATE_INTERVAL) {updateLEDs(currentTime);lastLedUpdate = currentTime;}
}这种结构采用了非阻塞设计,避免使用delay()函数导致系统无响应。每个任务只在特定时间间隔执行,确保系统可以流畅处理多项任务。
3. 雷达数据处理
数据处理由两个主要函数完成:
1.readRadarData() - 从串口读取原始数据
2.parseRadarData() - 解析数据提取速度和信号强度
解析函数通过寻找特定字符串模式("v="和"str=")来提取相关信息:
void parseRadarData(String data) {int vPos = data.indexOf("v=");int strPos = data.indexOf("str=");if (vPos > 0 && strPos > 0) {String velocityStr = data.substring(vPos + 2, strPos - 2);radarData.velocity = velocityStr.toFloat();String signalStr = data.substring(strPos + 4);radarData.signal = signalStr.toInt();radarData.presence = (radarData.signal > 0);radarData.lastUpdateTime = millis();}
}系统还包含超时检测机制,如果3秒内未收到新数据,会自动将存在状态设为false:
if (millis() - radarData.lastUpdateTime > 3000) {if (radarData.presence) {radarData.presence = false;radarData.velocity = 0.0;radarData.signal = 0;newDataReceived = true;}
}4. 动画系统分析
本项目最大的亮点之一是基于检测状态的动态LED动画系统,共有6种不同风格:
彩虹动画(Rainbow) - 循环显示彩虹色谱
脉冲动画(Pulse) - 同步呼吸灯效果
彗星动画(Comet) - 带尾迹的移动光点
频闪动画(Strobe) - 随机颜色闪烁
火焰动画(Fire) - 模拟真实火焰效果
闪烁动画(Sparkle) - 随机像素闪烁
每种动画都接收两个参数:
- speed - 基于检测到的运动速度
- intensity - 基于信号强度
这使得动画不仅能指示存在检测,还能反映移动速度和信号质量,提供更丰富的视觉反馈。
5. 火焰效果算法详解
火焰效果是最复杂的动画之一,它使用热传递模型模拟真实火焰:
void fireAnimation(float speed, float intensity) {int cooling = 55 + (1.0 - speed) * 100; // 火焰冷却速度int sparking = 120 * speed; // 新火花的几率static byte heat[LED_COUNT]; // 热量数组// 步骤1. 冷却每个像素for(int i = 0; i < strip.numPixels(); i++) {int cooldown = random(0, ((cooling * 10) / strip.numPixels()) + 2);if(cooldown > heat[i]) heat[i] = 0;else heat[i] = heat[i] - cooldown;}// 步骤2. 热量上升模拟for(int i = strip.numPixels() - 1; i >= 2; i--) {heat[i] = (heat[i - 1] + heat[i - 2] + heat[i - 3]) / 3;}// 步骤3. 随机点燃新火花if(random(255) < sparking) {int y = random(strip.numPixels() / 3); // 底部heat[y] = heat[y] + random(160, 255);if(heat[y] > 255) heat[y] = 255;}// 步骤4. 将热量转换为LED颜色for(int i = 0; i < strip.numPixels(); i++) {int pixelHeat = (int)(heat[i] * intensity);if(pixelHeat > 255) pixelHeat = 255;strip.setPixelColor(i, HeatColor((byte)pixelHeat));}
}该算法通过四个步骤模拟火焰物理特性:
1- 随机冷却 - 模拟热量自然散失
2- 热量传递 - 模拟热量上升
3-火花生成 - 模拟新火源产生
4-颜色映射 - 将热量转换为从红到黄的颜色
七、系统配置与调试
必要库文件
使用Arduino IDE开发此项目需安装以下库:
- Adafruit_GFX - 图形库(v1.10.0+)
- Adafruit_SSD1306 - OLED驱动(v2.4.0+)
- Adafruit_NeoPixel - LED控制(v1.7.0+)
- SoftwareSerial - 软串口(Arduino内置)
可通过Arduino IDE的库管理器安装这些库:工具 -> 管理库
开发板配置
1、安装ESP8266开发板支持:
- 文件 -> 首选项
- 添加开发板管理器URL: http://arduino.esp8266.com/stable/package_esp8266com_index.json
- 工具 -> 开发板 -> 开发板管理器 -> 搜索"ESP8266"并安装
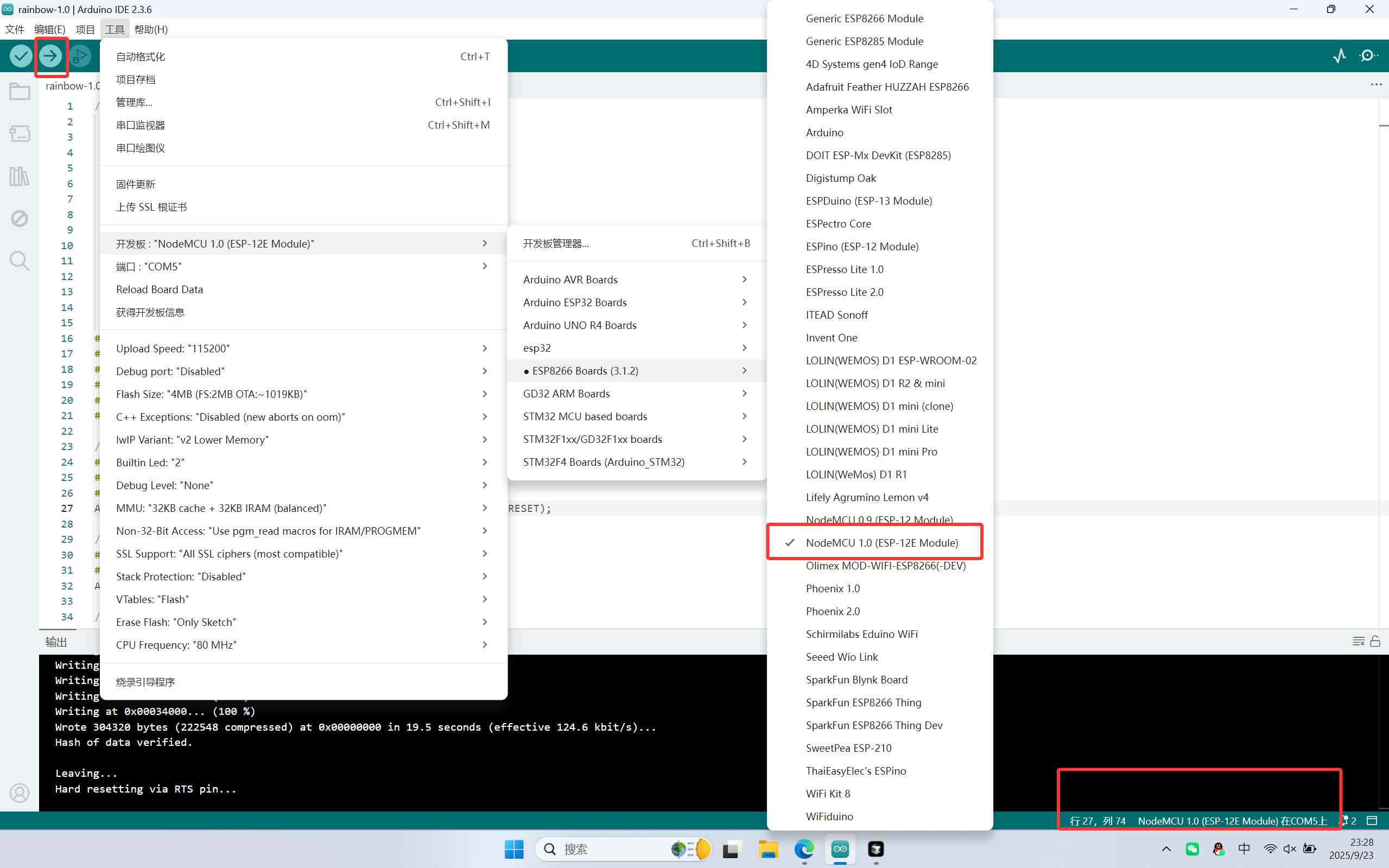
2、选择合适的开发板设置:
- 开发板: "NodeMCU 1.0 (ESP-12E Module)"
- CPU频率: 80 MHz
- Flash大小: 4M (1M SPIFFS)
- 上传速度: 115200
- 端口: 选择连接ESP8266的COM端
烧录方法
1、连接硬件:
- 使用Micro USB线连接ESP8266和电脑
- 确保驱动程序已正确安装(Windows可能需要CH340/CP210x驱动)
2、代码上传:
- 在Arduino IDE中打开完整代码
- 选择正确的端口和开发板设置
- 点击"上传"按钮(箭头图标)
- 等待编译和上传完成(约30-60秒)
3、验证上传:
- 上传完成后,ESP8266会自动重启
- 观察OLED显示屏是否显示启动信息
- LED灯带应执行启动彩虹动画
参数调整
系统有多个可调参数,可根据实际需求进行修改:
1、显示刷新率
const unsigned long DISPLAY_UPDATE_INTERVAL = 250; // 默认250ms2、LED动画速度:
const unsigned long LED_UPDATE_INTERVAL = 25; // 默认25ms3、动画模式自动切换时间:
const unsigned long MODE_CHANGE_INTERVAL = 5000; // 默认5000ms4、无人检测超时时间:
if (millis() - radarData.lastUpdateTime > 3000) // 默认3000ms八、实际应用场景
智能家居集成
本系统可作为智能家居的关键组件,与其他系统集成:
1、照明控制:
- 当雷达检测到人员进入房间时自动开灯
- 根据移动速度调整灯光亮度或色温
- 无人状态下自动关闭照明节能
2、安全监控:
- 在无人应在场的区域检测到移动时触发报警
- 记录移动速度和信号强度数据,分析异常模式
- 结合摄像头系统进行二次确认
3、环境控制:
- 根据人员存在情况调整空调、新风系统
- 提高能源利用效率,降低能耗
商业应用
1、客流分析:
- 安装在零售店入口,统计客流量和移动模式
- 分析顾客在特定区域的停留时间
2、互动展示:
- 博物馆或展览会的互动装置
- 根据观众移动触发不同展示内容
3、节能管理:
- 办公楼智能照明和空调控制
- 会议室使用状态监测
拓展功能
1、WiFi连接:利用ESP8266的WiFi功能,可添加以下扩展:
#include <ESP8266WiFi.h>#include <ESP8266WebServer.h>const char* ssid = "YourWiFiName";const char* password = "YourWiFiPassword";ESP8266WebServer server(80);void setup() {// 现有代码...// 添加WiFi连接WiFi.begin(ssid, password);while (WiFi.status() != WL_CONNECTED) {delay(500);Serial.print(".");}// 设置Web服务器路由server.on("/", handleRoot);server.on("/data", handleData);server.begin();}void loop() {// 现有代码...server.handleClient();}// Web页面和APIvoid handleRoot() {String html = "<!DOCTYPE html><html><head>";html += "<title>雷达检测系统</title></head><body>";html += "<h1>雷达检测状态</h1>";html += "<p>状态: " + String(radarData.presence ? "检测到" : "无检测") + "</p>";html += "<p>速度: " + String(radarData.velocity) + " km/h</p>";html += "<p>信号强度: " + String(radarData.signal) + "</p>";html += "<script>setTimeout(function(){location.reload()},1000);</script>";html += "</body></html>";server.send(200, "text/html", html);}void handleData() {String json = "{\"presence\":" + String(radarData.presence ? "true" : "false");json += ",\"velocity\":" + String(radarData.velocity);json += ",\"signal\":" + String(radarData.signal) + "}";server.send(200, "application/json", json);}2、MQTT集成:将检测数据发布到MQTT服务器,实现与智能家居平台的集成:
#include <PubSubClient.h>WiFiClient espClient;PubSubClient client(espClient);void setup() {// 现有代码...client.setServer("mqtt.yourdomain.com", 1883);client.connect("ESP8266Radar", "username", "password");}void publishData() {String payload = "{\"presence\":" + String(radarData.presence ? "true" : "false");payload += ",\"velocity\":" + String(radarData.velocity);payload += ",\"signal\":" + String(radarData.signal) + "}";client.publish("home/radar", payload.c_str());}九、故障排除与解决方案
常见问题
1、无雷达数据
- 现象:OLED显示无数据,LED显示待机模式
- 原因:雷达传感器连接问题或通信失败
- 解决方法:
- 检查TX/RX连接是否正确(雷达TX→ESP8266 D5,雷达RX→ESP8266 D6)
- 确认波特率设置正确(115200)
- 检查电源电压是否稳定在5V
2、OLED显示异常
- 现象:OLED不显示或显示混乱
- 原因:I2C连接问题或地址设置错误
- 解决方法:
- 检查I2C连接(SDA→D2, SCL→D1)
- 确认OLED I2C地址(常见为0x3C或0x3D)
- 验证I2C总线:
void scanI2C() {byte error, address;int nDevices = 0;for(address = 1; address < 127; address++ ) {Wire.beginTransmission(address);error = Wire.endTransmission();if (error == 0) {Serial.print("I2C设备找到,地址: 0x");if (address<16) Serial.print("0");Serial.println(address,HEX);nDevices++;}}if (nDevices == 0)Serial.println("未找到I2C设备");}3、LED灯带不工作
- 现象:LED灯带不亮或闪烁不稳定
- 原因:电源不足或数据线连接问题
- 解决方法:
- 提供独立5V电源给LED灯带
- 确认数据线连接正确(DO→D4)
- 添加300-500Ω电阻在数据线上减少干扰
- 检查代码中LED_PIN和LED_COUNT设置是否正确
4、系统不稳定
- 现象:系统随机重启或死机
- 原因:电源不稳定或内存溢出
- 解决方法:
- 使用稳定电源(推荐5V/2A以上)
- 减少字符串操作,避免内存碎片化
- 添加看门狗定时器:
ESP.wdtDisable(); // 关闭默认看门狗ESP.wdtEnable(WDTO_8S); // 设置8秒超时调试技巧
1、串口监视器
- 设置波特率115200观察系统输出信息
- 查看雷达数据原始内容和解析结果
2、测试模式
- 添加测试开关模拟雷达数据:
#define TEST_MODE false // 设为true启用测试模式void simulateRadarData() {if (TEST_MODE) {radarData.presence = true;radarData.velocity = random(10, 50) / 10.0;radarData.signal = random(30, 100);radarData.lastUpdateTime = millis();}} - 逐模块测试
- 分别测试OLED、LED灯带和雷达模块
- 使用简化代码隔离问题
十、总结与未来展望
项目总结
本项目成功实现了基于ESP8266和CEM5826-M11毫米波雷达传感器的动态检测系统,具有以下特点:
高效检测:利用24GHz毫米波技术实现穿透性检测
可视化反馈:OLED显示检测数据,LED灯带提供动态视觉效果
多样化视觉效果:六种不同动画模式根据检测状态自动切换
实时数据处理:解析雷达传感器数据,提取速度和信号强度信息
非阻塞设计:使用时间调度而非delay(),确保系统响应性
未来改进方向
1、算法优化:
- 实现移动方向检测(接近/远离)
- 添加人数估计算法
- 优化信号处理,减少误检率
2、硬件升级:
- 使用ESP32替代ESP8266,获得更强处理能力和蓝牙功能
- 添加继电器模块直接控制家电
- 集成温湿度传感器,实现更全面的环境监控
3、软件扩展:
- 开发手机APP远程监控和控制
- 实现历史数据记录和分析
- 与主流智能家居平台(如HomeAssistant、Apple HomeKit等)集成
4、能耗优化:
- 实现低功耗模式,延长电池供电时间
- 智能调整雷达工作频率,根据使用场景节能
结语
毫米波雷达技术为智能家居和存在检测提供了一种可靠、高效的解决方案。本项目展示了如何将这一技术与微控制器和视觉反馈相结合,创建功能丰富的动态检测系统。随着物联网技术的不断发展,这类系统将在智能家居、安防监控、能源管理等领域发挥越来越重要的作用。
通过本文提供的详细代码和指南,读者可以轻松复制这一项目,并根据自己的需求进行定制和扩展,开启智能检测的新可能。
参考资料
1.CEM5826-M11毫米波雷达传感器数据手册
2.ESP8266 NodeMCU官方文档
3.Adafruit NeoPixel库使用指南
4.Adafruit SSD1306 OLED显示屏使用指南
5.Arduino IDE ESP8266开发环境配置