欧拉角描述相机的运动
一般来说在sfm或者slam中解算得到的都是旋转矩阵,这个时候如何希望使用欧拉角去描述运动的化,就要按照特定的ZYX或者其他的顺序去将旋转举证推得欧拉角。
world to cams的旋转矩阵按照ZYX的顺序得到如下所示的相机运动的欧拉角
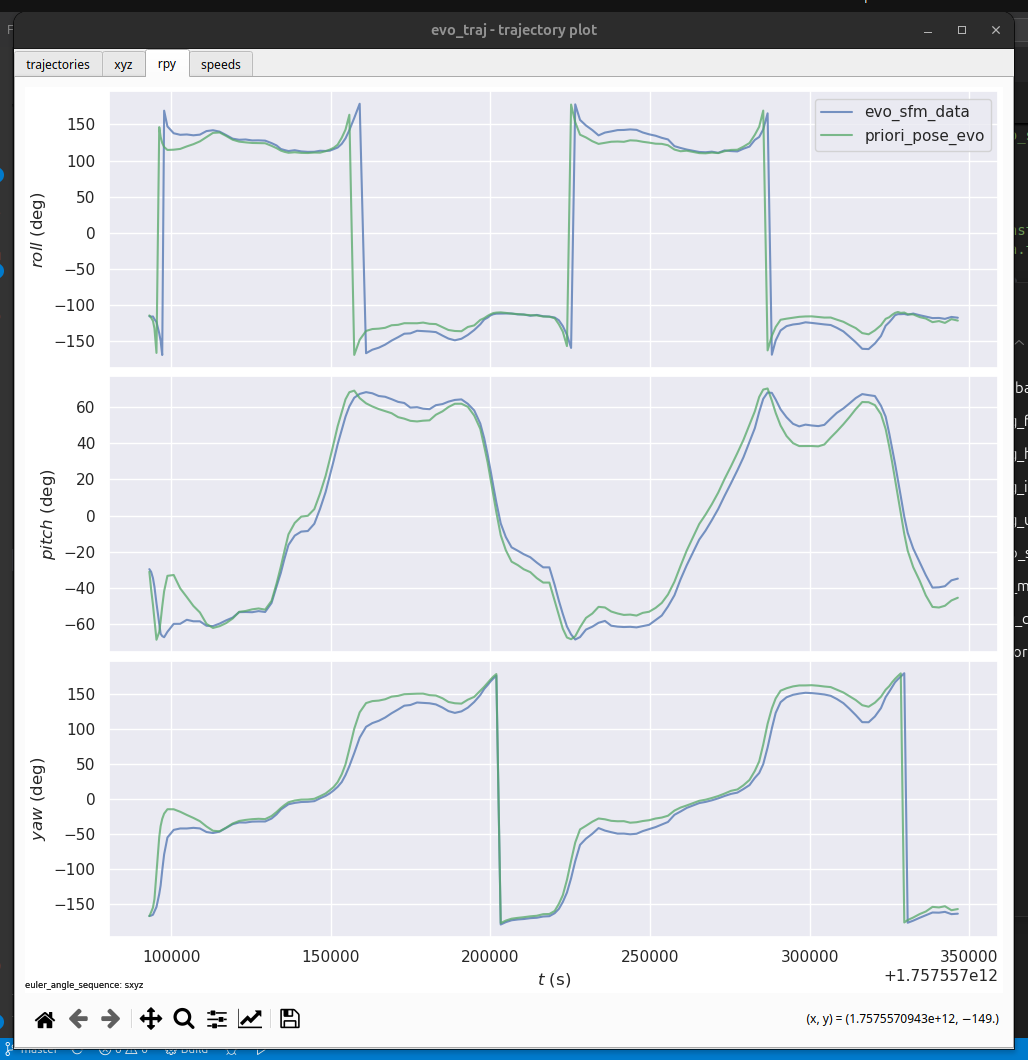
cams to world的旋转举证按照ZYX的顺序得对应相机运动的欧拉角
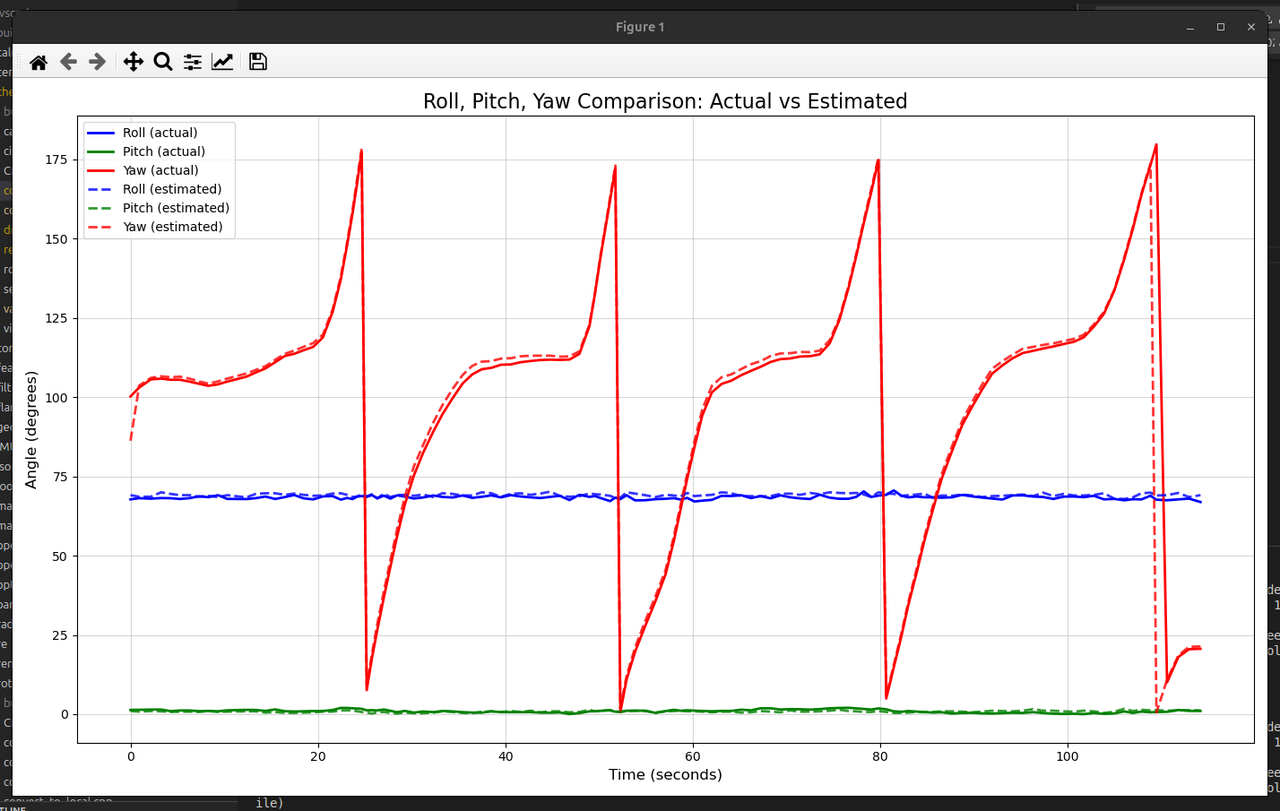
如上两个方式都能描述欧拉角,但是更符合直观的欧拉角变化的应该是第二种(cams to world)方式,roll和pitch只有小幅度的变化,只有yaw角上会有比较大的变化。