2025年IEEE TCE SCI2区,不确定环境下多无人机协同任务的时空优化动态路径规划,深度解析+性能实测
目录
- 1.摘要
- 2.多蚁群系统与多仓库无人机路径规划问题
- 3.时空优化算法
- 4.结果展示
- 5.参考文献
- 6.代码获取
- 7.算法辅导·应用定制·读者交流
1.摘要
传统路径规划方法难以有效应对不确定环境下多无人机系统的高任务密度与复杂空域需求,尤其在碰撞风险规避方面存在明显局限。本文提出一种创新动态时空优化方法,融合改进带时间窗车辆路径问题多蚁群系统与主动避碰策略。通过构建多起点路径规划场景下的多无人机协同路径优化模型,同步实现节点覆盖率最大化与路径冲突最小化。核心方案结合时空优化算法与节点权重量化机制,用于检测和解决路径冲突,并采用创新的节点选择策略构建概率冲突消解模型。
2.多蚁群系统与多仓库无人机路径规划问题
在实际无人机作业中,尽管运动本质上是三维的,但航空管理部门通常要求飞行路径被限制在特定高度层。因此,本文聚焦于降低指定飞行路径上的空中碰撞风险,采用二维平面建模。
多蚁群系统(MACS)作为求解TSP问题的启发式算法,核心思想是通过信息素轨迹和启发式数值引导人工蚂蚁生成路径。本文引入双蚁群协作机制,ACS-VEI通过航点聚类最小化无人机数量,ACS-TIME在时间窗约束下优化飞行效率,双蚁群通过共享最优解实现协同优化。
多仓库无人机带时间窗路径规划(MDURPTW)要求在满足时间窗、容量约束和避碰条件下,实现最小化路径总长度和无人机使用数量的双目标优化。目标函数为最大化被无人机访问的节点总数:
maxj∑i∈D∪V∑j∈V∑k∈Dxijk\max_{j}\sum_{i\in D\cup V}\sum_{j\in V}\sum_{k\in D}x_{ijk} jmaxi∈D∪V∑j∈V∑k∈D∑xijk
该模型通过节点访问约束、流量平衡约束、负载约束和子回路消除约束确保解的有效性。
3.时空优化算法
针对DETACH算法仅支持二维平面碰撞检测的局限性,本文提出时空优化算法(STO)用于求解MDURPTW问题,该算法融合时空交叉检测与孤立节点选择策略,实现了多维冲突消解。通过基于图论的空间路径交叉检测方法识别潜在空间交点,再引入时间维度验证区分真实时空冲突与二维伪冲突。基于检测结果,采用考虑截止时间、路径长度和客户权重的三重决策机制,动态选择可移除节点,在确保避碰效果的同时最小化孤立节点数量。
时空融合交叉检测策略
时空融合交叉检测策略包含空间路径交叉检测与时间交叉验证,空间检测阶段采用路径边界框检测法(PBBD),将无人机路径视为多边形边,通过投影边界框至坐标轴并检测重叠情况,初步判定路径交叉可能性:若两路径边界框无重叠,则直接判定无交叉。
向量交叉检测
两条路径边向量相对位置关系(共线、逆时针或顺时针)通过二维向量叉乘判定。结合PBBD与二维向量叉乘方法,进行路径对的交叉检测。当同时满足以下两个条件时,判定路径存在交叉: 两路径边向量在叉乘检测中呈现交叉关系;条件C1C_1C1和C2C_2C2均非正:
cross(P1,P2,Q1)=P1P2→×P2Q1→cross(P1,P2,Q1)=\overrightarrow{P1P2}\times\overrightarrow{P2Q1} cross(P1,P2,Q1)=P1P2×P2Q1
cross(P1,P2,Q2)=P1P2→×P2Q2→cross(P1,P2,Q2)=\overrightarrow{P1P2}\times\overrightarrow{P2Q2} cross(P1,P2,Q2)=P1P2×P2Q2
C1=cross(P1,P2,Q1)⋅cross(P1,P2,Q2)C1=cross(P1,P2,Q1)\cdot cross(P1,P2,Q2) C1=cross(P1,P2,Q1)⋅cross(P1,P2,Q2)
C2=cross(Q1,Q2,P1)⋅cross(Q1,Q2,P2)C2=cross(Q1,Q2,P1)\cdot cross(Q1,Q2,P2) C2=cross(Q1,Q2,P1)⋅cross(Q1,Q2,P2)
孤立节点选择策略
在MDURPTW问题中,每个节点包含截止时间和经济成本属性,并引入重要性等级指标。通过时空融合交叉检测识别冲突路径段,论文提出多准则决策分析(MCDA)的节点评估框架,通过移除可消除碰撞风险的节点实现避碰。节点综合得分模型:
Si=α⋅ULi+σ⋅UWi+γ⋅UDTiS_i=\alpha\cdot U_{L_i}+\sigma\cdot U_{W_i}+\gamma\cdot U_{DT_i} Si=α⋅ULi+σ⋅UWi+γ⋅UDTi
其中,ULl=1/LtU_{L_l}=1/L_tULl=1/Lt表示距离效用,UWl=WtU_{W_l}=W_tUWl=Wt表示重要性效用,UDTt=DTtU_{DT_t}=DT_tUDTt=DTt表示截止时间效用。
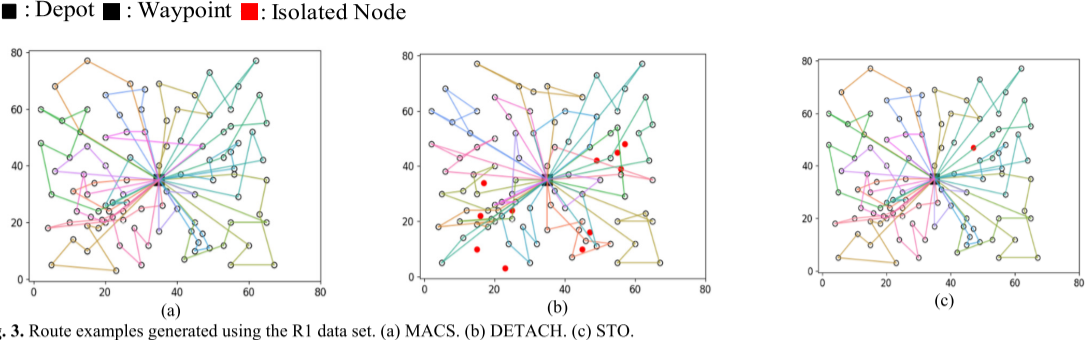
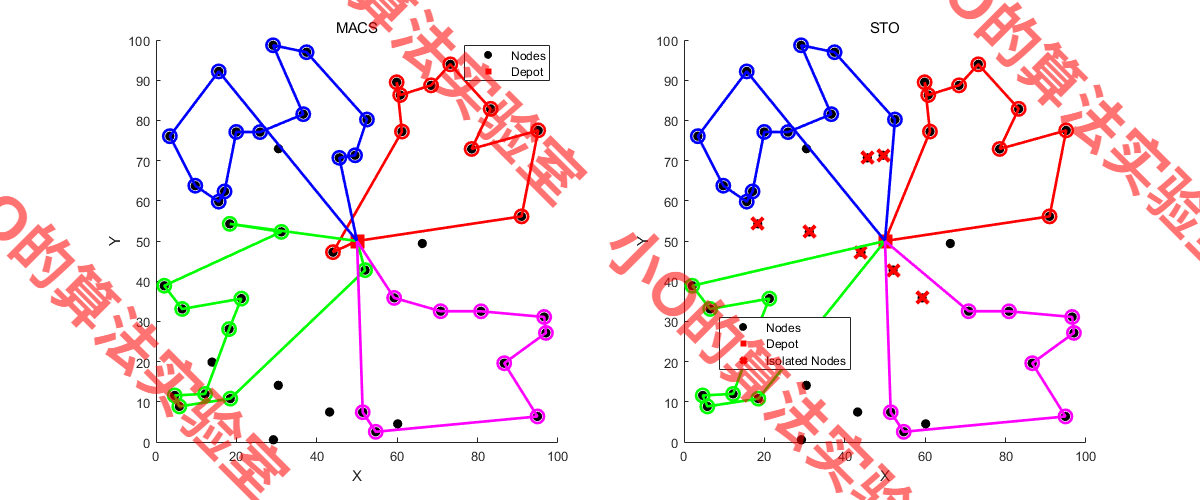
4.结果展示
5.参考文献
[1] Song Y, Zhao G, Zhang B, et al. An enhanced distributed differential evolution algorithm for portfolio optimization problems[J]. Engineering Applications of Artificial Intelligence, 2023, 121: 106004.
6.代码获取
xx
7.算法辅导·应用定制·读者交流
xx