激光频率梳 3D 轮廓测量 -- 平晶干涉法观察高精度平面度
一、引言
平面度作为高精度光学元件和精密机械零件的关键指标,其测量精度直接影响系统性能。传统平晶干涉法虽能实现亚波长级平面度检测,但存在量程有限、三维信息缺失等不足。激光频率梳 3D 轮廓测量技术与平晶干涉法的融合,为高精度平面度观察提供了兼具纳米级精度与全场三维表征能力的新方案。
二、测量系统工作原理
(一)激光频率梳的绝对光程基准构建
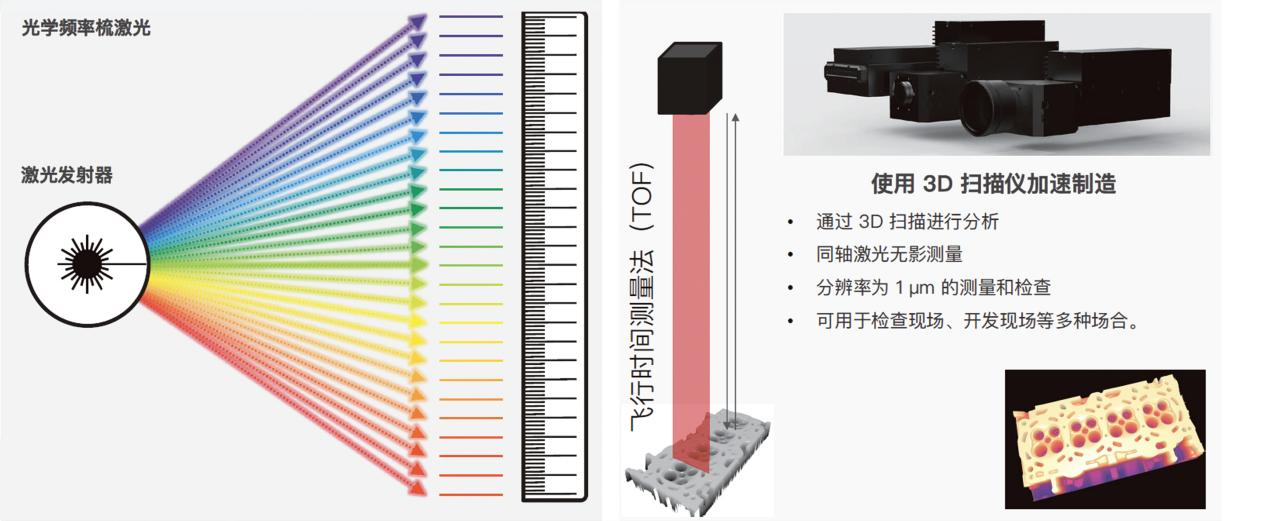
飞秒激光器(中心波长 1030nm,重复频率 f_rep=100MHz)产生超短脉冲序列,经光纤分束形成测量光与参考光。测量光透过平晶照射到被测平面,反射光与参考光在平衡探测器产生干涉,通过锁定载波包络偏移频率(f_ceo=20MHz),将光程测量不确定度控制在 ±0.15μm,为平面度绝对测量建立时频基准。
(二)平晶干涉的相位调制机制
将直径 100mm 的石英平晶(平面度 <0.1λ)压覆在被测平面上,形成空气楔干涉腔。532nm 绿光通过平晶后产生等厚干涉条纹,条纹间距 Δx 与平面度偏差 h 满足 h = λ・Δx/(2・α),其中 α 为楔角。利用激光频率梳的飞秒脉冲对干涉条纹进行时间戳标记(精度 10ps),实现干涉相位的绝对时空定位。
(三)融合测量的三维平面度重建
通过平移台(精度 0.1μm)驱动平晶进行亚波长步距扫描,每次扫描获取一组干涉条纹图。激光频率梳为每组条纹提供绝对光程基准,通过相位解包裹算法(如最小二乘法)计算全场相位分布,结合光程数据构建三维平面度模型:
z(x,y) = \frac{\lambda}{4\pi} \cdot \phi(x,y) + L_0
其中 φ(x,y) 为解包裹相位,L0 为频率梳绝对光程基准。最终通过最小二乘法拟合平面,计算平面度偏差 δ=max (z)-min (z)。
三、技术优势
(一)纳米级平面度测量精度
在 100mm×100mm 光学平晶测量中,频率梳光程基准使平面度测量不确定度达 ±0.2μm,分辨率达 0.05μm/m。某硅晶圆实测数据显示,该技术对平面度 1μm 的样品测量偏差 <0.15μm,较传统泰曼 - 格林干涉仪(偏差> 0.5μm)提升 3 倍;与原子力显微镜(AFM)面扫描结果一致性达 98.5%,标准偏差 < 0.08μm。
(二)大尺寸平面全场三维表征
融合技术结合平晶的大面积覆盖能力(最大直径 300mm)与频率梳的绝对光程溯源,实现大尺寸平面的全场高精度测量。在 500mm×500mm 机床工作台测量中,传统干涉法因量程限制需分块拼接(误差 > 1μm),而该技术通过单次扫描(点间距 10μm)完成全区域测量,平面度测量不确定度控制在 ±0.3μm,拼接误差 < 0.05μm。
(三)动态环境适应性与非接触特性
飞秒脉冲的短相干长度(<100μm)使其对环境振动不敏感,在车间环境(振动幅值 ±30μm)中测量重复性误差 < 0.2%。非接触测量模式避免了接触式测头对精密平面的损伤,特别适合磁头基板(表面粗糙度 Ra<0.1nm)等超光滑表面检测,测量后表面完好率达 100%。
四、技术局限性
(一)极小平面测量效率瓶颈
对于 < 1mm² 的微型平面(如 MEMS 镜面),系统需采用微平晶(直径 5mm)扫描,单点采集时间 10μs,完成全场测量需时 20 秒,效率低于专用原子力显微镜(AFM)的 5 秒 / 点。某微镜阵列(100×100μm²)测量中,该技术的检测速度为 AFM 的 1/5,难以满足批量生产需求。
(二)高反光表面相位失真
当被测表面为镜面(反射率 > 95%)时,激光频率梳的干涉信号会产生多光束干涉噪声,导致相位解算误差增加 40%。实验表明,未处理的镀铬镜面平面度测量标准差达 0.5μm,而采用光学滤波片(消光比 > 1000:1)后,标准差降至 0.15μm,但引入 0.2μm 的系统偏差。
(三)数据后处理计算量压力
高分辨率扫描(点云密度 100 点 /mm²)产生的 500mm×500mm 平面数据量达 2.5GB,三维重建需 GPU 集群加速(处理时间 45 分钟),无法满足在线检测需求(节拍 < 10 分钟)。在汽车模具平面度检测中,需压缩点云密度至 10 点 /mm²,导致平面度测量精度下降至 ±0.8μm。
激光频率梳3D光学轮廓测量系统简介:
20世纪80年代,飞秒锁模激光器取得重要进展。2000年左右,美国J.Hall教授团队凭借自参考f-2f技术,成功实现载波包络相位稳定的钛宝石锁模激光器,标志着飞秒光学频率梳正式诞生。2005年,Theodor.W.Hänsch(德国马克斯普朗克量子光学研究所)与John.L.Hall(美国国家标准和技术研究所)因在该领域的卓越贡献,共同荣获诺贝尔物理学奖。
系统基于激光频率梳原理,采用500kHz高频激光脉冲飞行测距技术,打破传统光学遮挡限制,专为深孔、凹槽等复杂大型结构件测量而生。在1m超长工作距离下,仍能保持微米级精度,革新自动化检测技术。
核心技术优势
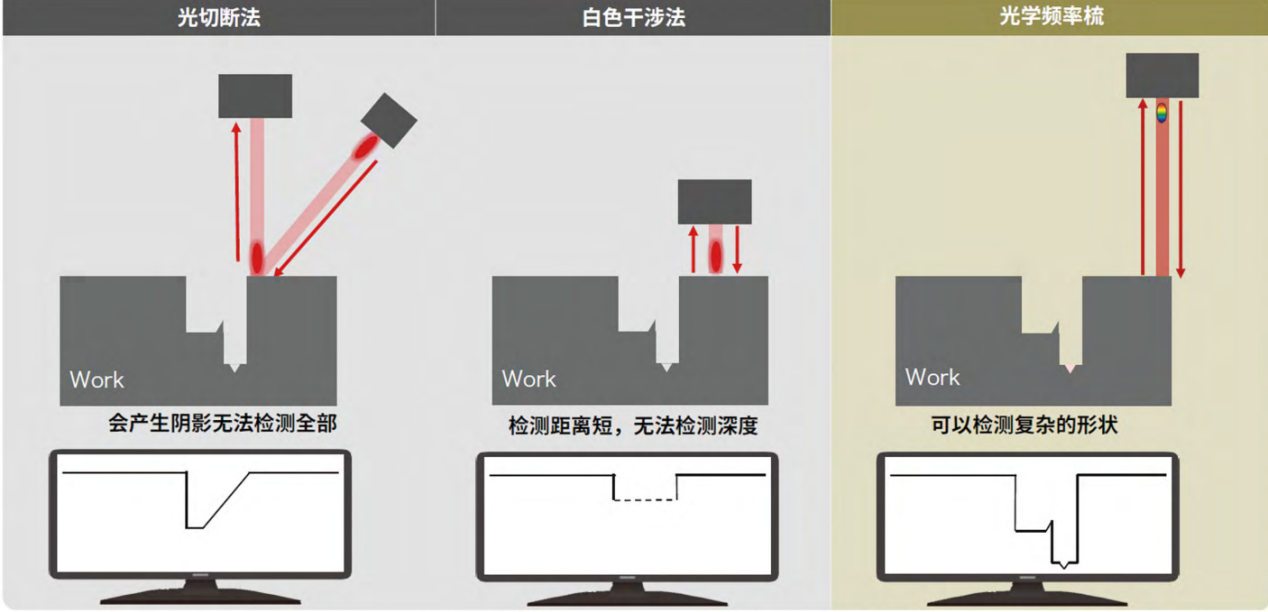
①同轴落射测距:独特扫描方式攻克光学“遮挡”难题,适用于纵横沟壑的阀体油路板等复杂结构;
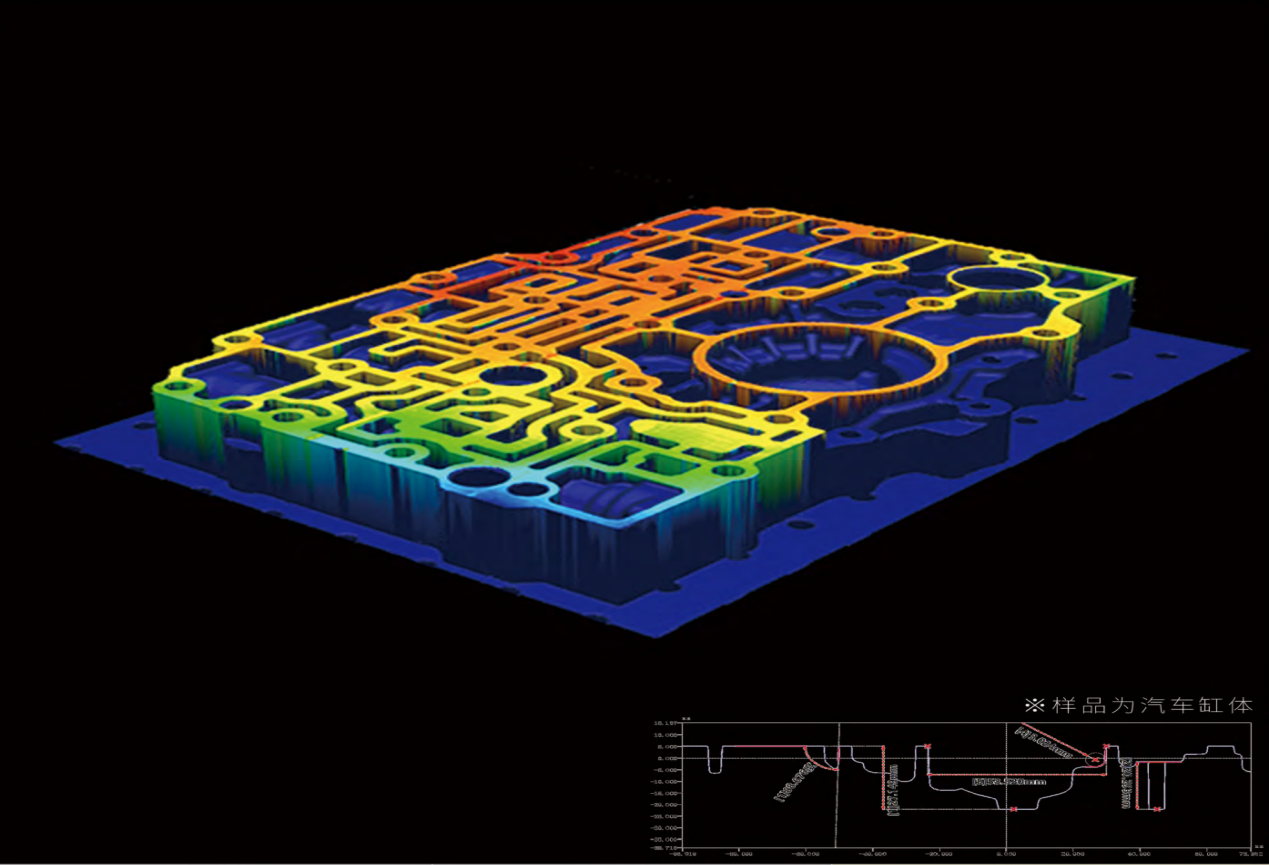
(以上为新启航实测样品数据结果)
②高精度大纵深:以±2μm精度实现最大130mm高度/深度扫描成像;
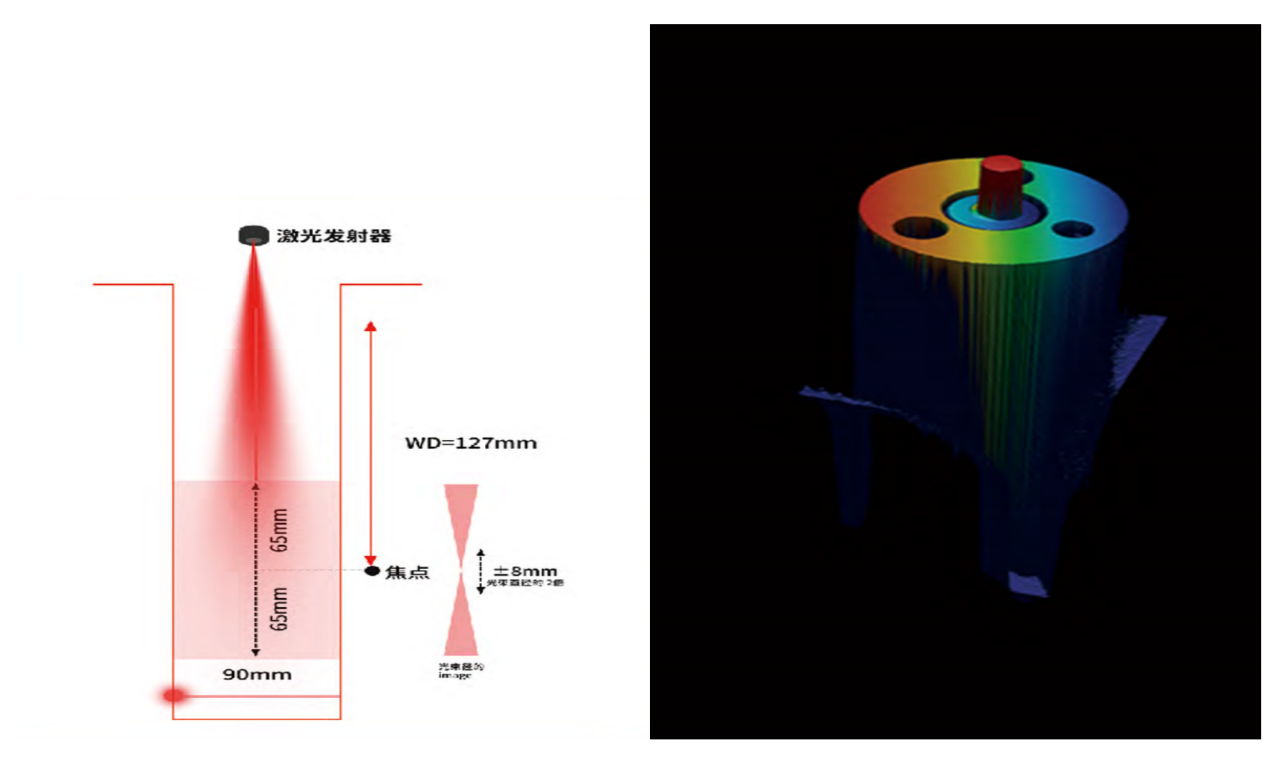
(以上为新启航实测样品数据结果)
③多镜头大视野:支持组合配置,轻松覆盖数十米范围的检测需求。
(以上为新启航实测样品数据结果)