Linux驱动开发(2)进一步理解驱动
一、Linux下应用程序调用驱动程序流程
1、简要流程
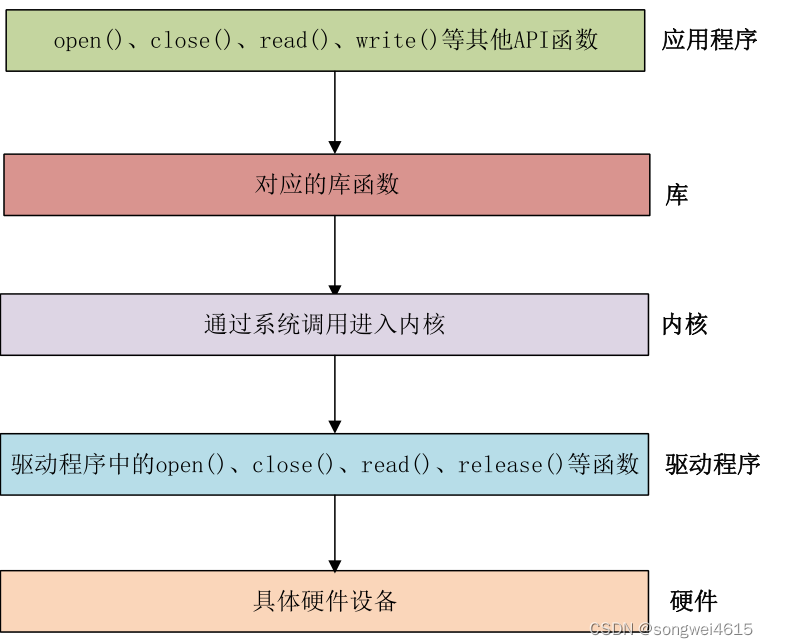
- Linux下进行驱动开发,完全将驱动程序与应用程序隔开,中间通过C标准库函数以及系统调用完成驱动层和应用层的数据交换。
- 驱动加载成功以后会在“/dev”目录下生成一个相应的文件,应用程序通过对“/dev/xxx” (xxx 是具体的驱动文件名字) 的文件进行相应的操作即可实现对硬件的操作。
- 用户空间不能直接对内核进行操作,因此必须使用一个叫做 “系统调用”的方法 来实现从用户空间“陷入” 到内核空间,这样才能实现对底层驱动的操作。
- 每一个系统调用,在驱动中都有与之对应的一个驱动函数,在 Linux 内核文件 include/linux/fs.h 中有个叫做 file_operations 的结构体,此结构体就是 Linux 内核驱动操作函数集合。

2、从驱动加载开始的详细流程(字符驱动)
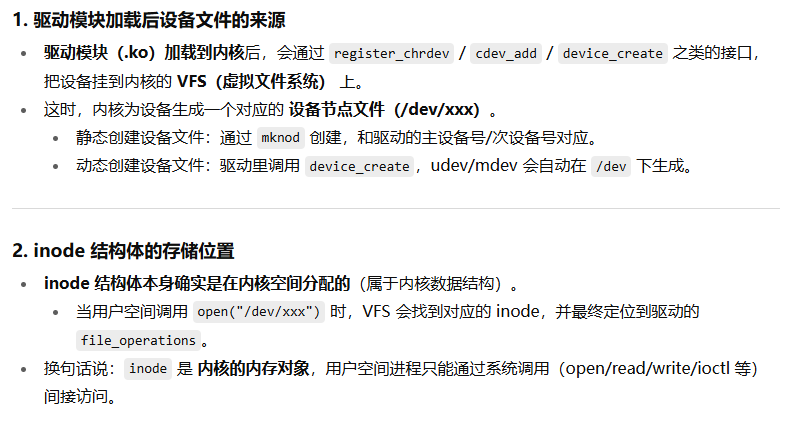
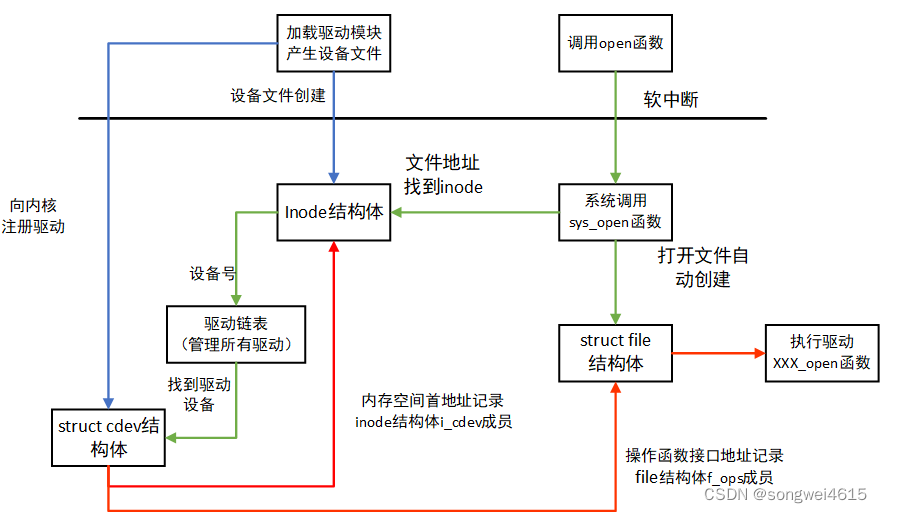
(1)加载一个驱动模块,产生一个设备文件,有唯一对应的inode结构体。
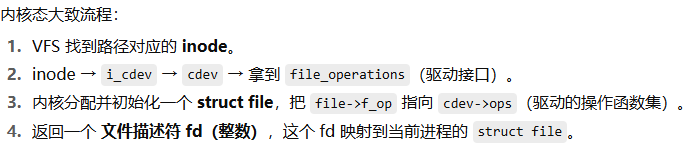
(2)应用层调用open函数打开设备文件,对于上层open调用到内核时会发生一次软中断,从用户空间进入到内核空间。
(3)open会调用到sys_open(内核函数),sys_open根据文件的地址,找到设备文件对应的struct inode结构体描述的信息,可以知道接下来要操作的设备类型(字符设备还是块设备),还会分配一个struct file结构体。
(4)根据struct inode结构体里面记录的主设备号和次设备号,在驱动链表(管理所有设备的驱动)里面,找到字符设备驱动.
(5)每个字符设备都有一个struct cdev结构体。此结构体描述了字符设备所有信息,其中最重要的一项就是字符设备的操作函数接口.
(6)找到struct cdev结构体后,linux内核就会将struct cdev结构体所在的内存空间首地址记录在struct inode结构体i_cdev成员中,将struct cdev结构体中的记录的函数操作接口地址记录在struct file结构体的f_ops成员中。
(7)执行xxx_open驱动函数。
3、一些问题
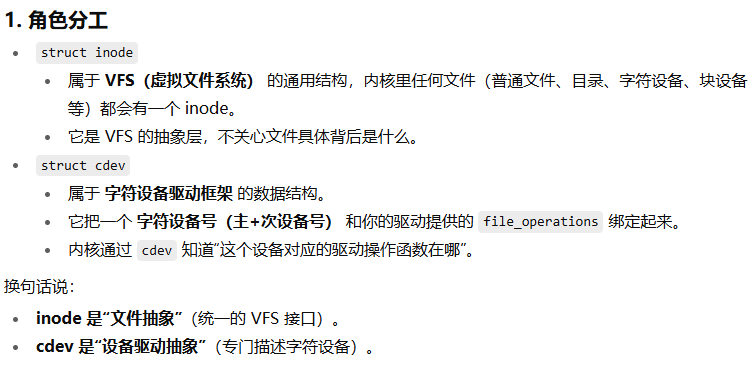
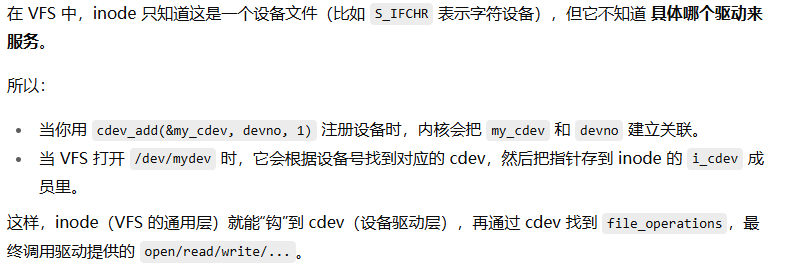
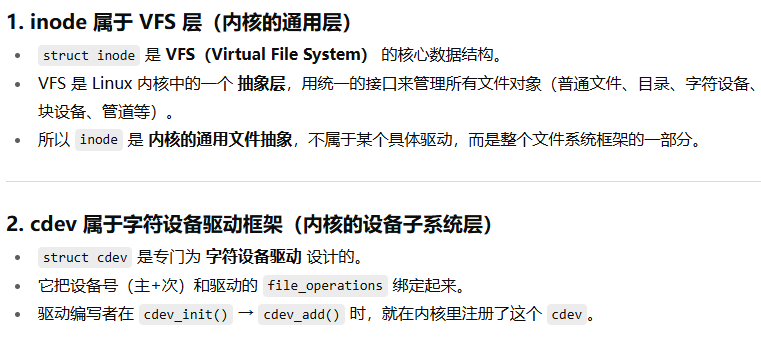
(1)inode和cdev的关系
(2)i_cdev的作用
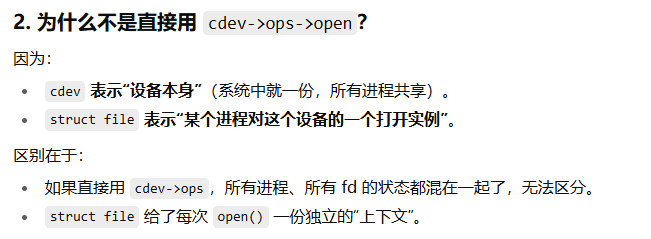
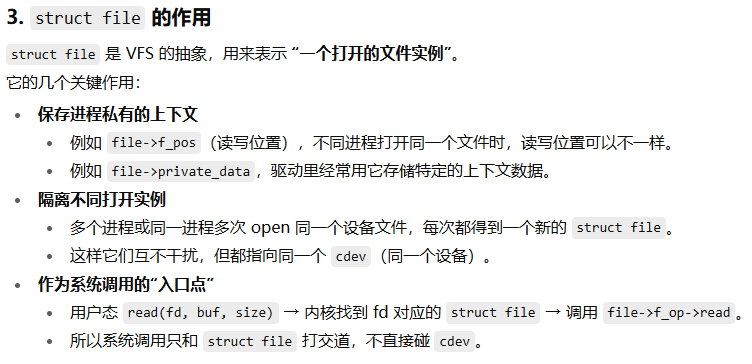
(3)struct file结构体
4、设备号
- Linux 中每个设备都有一个设备号,设备号由主设备号和次设备号两部分组成
- 主设备号表示某一个具体的驱动,次设备号表示使用这个驱动的各个设备。
- Linux 提供了一个名为 dev_t 的数据类型表示设备号其中高 12 位为主设备号, 低 20 位为次设备
- 使用"cat /proc/devices"命令即可查看当前系统中所有已经使用了的设备号(主)
MAJOR // 用于从 dev_t 中获取主设备号,将 dev_t 右移 20 位即可。
MINOR //用于从 dev_t 中获取次设备号,取 dev_t 的低 20 位的值即可。
MKDEV //用于将给定的主设备号和次设备号的值组合成 dev_t 类型的设备号。
二、地址映射与I/O内存访问
虚拟地址空间和实际的内存之间的映射关系,就叫地址映射。在驱动开发的过程中会用到内存映射函数。对于32位处理器来说,虚拟地址范围是2^32=4GB.
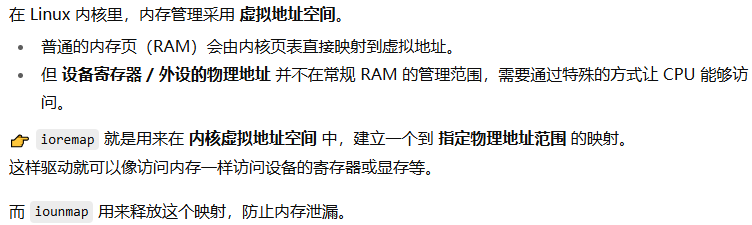
CPU只能访问虚拟地址,而CPU需要向寄存器地址写入数据的时候不能直接写入,必须得到寄存器物理地址在Linux系统中对应的虚拟地址。物理内存和虚拟内存之间的转换,需要用到: ioremap 和 iounmap两个函数。
1、ioremap与iounmap:获取指定物理地址空间对应的虚拟地址空间
ioremap的用法:
#define addr (0X020E0068) // 物理地址
static void __iomem* va; //指向映射后的虚拟空间首地址的指针
va=ioremap(addr, 4); // 得到虚拟地址首地址
这里就是用ioremap获得了addr对应的虚拟地址空间。
卸载驱动时要使用 iounmap 函数释放掉 ioremap 函数所做的映射。
iounmap(va);//va是要取消映射的虚拟地址空间首地址
2、为什么需要ioremap
3、I/O内存访问函数
当外部寄存器或外部内存映射到内存空间时,称为 I/O 内存。但是对于 ARM 来说没有 I/O 空间,因此 ARM 体系下只有 I/O 内存(可以直接理解为内存)。
使用 ioremap 函数将寄存器的物理地址映射到虚拟地址后,可以直接通过指针访问这些地址,但是 Linux 内核不建议这么做,而是推荐使用一组操作函数来对映射后的内存进行读写操作。
(1)读操作函数
u8 readb(const volatile void __iomem *addr)
u16 readw(const volatile void __iomem *addr)
u32 readl(const volatile void __iomem *addr)
readb、 readw 和 readl 分别对应 8bit、 16bit 和 32bit 读操作,参数 addr 就是要读取写内存地址,返回值是读取到的数据。
(2)写操作函数
void writeb(u8 value, volatile void __iomem *addr)
void writew(u16 value, volatile void __iomem *addr)
void writel(u32 value, volatile void __iomem *addr)
writeb、 writew 和 writel分别对应 8bit、 16bit 和 32bit 写操作,参数 value 是要写入的数值, addr 是要写入的地址。