稳态太阳光模拟器 | 多源分布式设计的要点有哪些?
稳态太阳模拟器的多源分布式设计,是一种通过多组独立光源单元分布式排布、结合稳态光学调控技术,实现对太阳光谱、辐照强度及辐照均匀性精准复现的高端光模拟技术。其核心优势在于突破传统模拟光源在长期工作稳定性、大面积辐照均匀性及能量传递效率上的局限,能为科研与工业场景提供持续、可控且高精度的太阳光照模拟环境。紫创测控Luminbox深耕太阳光模拟器技术创新,为多行业提供设计解决方案,下文将为大家详细介绍稳态太阳模拟器的多源分布式设计要点。
一、效率分析
稳态太阳模拟器的多源分布式匀光系统主要包括反射光学系统与折射光学系统,但过多的反射会导致大量的能量损耗。因此,效率提升的核心在于减少光学系统能量损耗与优化光能传递路径。设计优先采用 “超半球齐明透镜 + 单块薄透镜” 的简化光学架构,超半球齐明透镜可实现光源全孔径集光,避免朗伯体光源边缘光线逃逸;单块薄透镜作为二次光学元件,优化参数、减少透镜间的光吸收与散射损耗,同时规避复杂结构带来的装配误差,为后续多光源协同工作奠定高效能量基础。
二、单光源优化
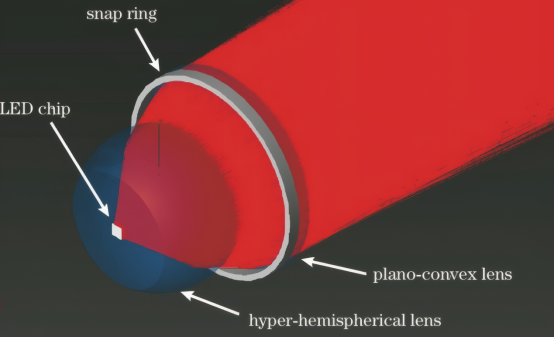
单光源投光系统的仿真示意图
单光源稳定性是稳态太阳模拟器的多源分布式系统稳态输出的关键。选用色散系数低(阿贝数 64.1)的 BK7 玻璃制作透镜,作为核心集光元件,将LED 晶片精准定位在齐明点,通过光学设计软件以 “阻尼最小二乘法” 优化透镜参数,改善光斑形状与光能分布,确保出射光斑呈规则形状,边缘强度衰减低于 1%。通过精准的集光元件选取与透镜参数优化,单光源在高效传输光能的同时,输出稳定、均匀的光斑,为多光源系统协同工作筑牢根基。
三、系统结构优化
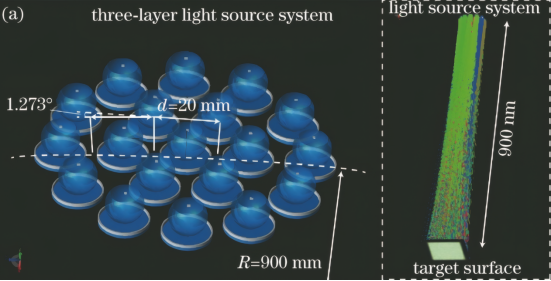
光源结构及系统的光学仿真示意图
稳态太阳模拟器的多源分布式设计,为提升多光源在公共与单光源匀光区的效率,光源系统由多个窄带光源与透镜构成的单元紧凑组合,排布于距靶面中心特定距离的球面上。通过环形布局,各环层光源平面相对内层偏转特定角度,层间保持适宜厚度,促使光线以均匀角度投射至靶面,有效规避边缘光源的强度衰减,确保靶面辐照均匀性。
光学系统方面,选用超半球齐明透镜作为集光元件,使光源光线近乎 “零像差” 出射,大幅提升光线收集效率。同时,搭配经专业光学软件优化的透镜,进一步改善光斑质量与光能传递效率。通过合理的光源布局与高效光学系统协同,实现精准稳定的太阳光模拟输出
四、光谱拟合
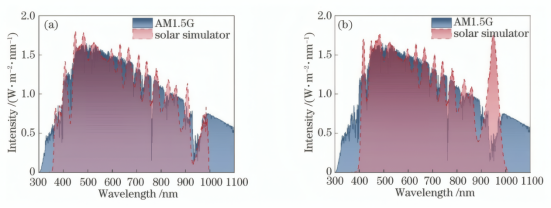
太阳光谱的拟合结果 (a) 350~1000 nm波长之间的光谱拟合结果;(b) 400~1100 nm波长之间的光谱拟合结果
光谱拟合以还原 AM1.5G 标准太阳光谱为目标,先选多种不同峰值波长的 LED,利用其单色性优势搭建基础光源体系。再借助专业软件,以优化算法调整各 LED 光强比例,让合成光谱趋近标准光谱。同时,通过皮尔森相关系数、均方根误差等评价函数实时评估,确保 400-1100nm 关键波段光谱匹配度达 A 级,精准复现太阳光谱特征,为实验提供可靠光源支撑。
稳态太阳模拟器通过多源分布式设计,可构建起高效、稳定、精准的光模拟体系:以 “超半球齐明透镜 + 单块薄透镜” 简化光学架构降低能量损耗,借单光源透镜材料与参数优化保障输出稳定,靠球面环形布局实现大面积均匀辐照,凭多波段 LED 协同与科学评估达成高光谱匹配度。该设计有效突破传统模拟光源在长期工作稳定性、能量效率及辐照均匀性上的局限,为多领域提供符合行业标准的可控光环境解决方案。
Luminbox大面积LED太阳模拟器
紫创测控Luminbox全光谱大面积LED太阳模拟器以A+AA+综合性能,实现辐照均匀、光谱精准与运行稳定的三重突破,通过权威认证,为材料测试提供超稳定、标准化的全光谱光照解决方案,推动测试迈向更高精度与可重复性。

A+级光谱:优于ClassAAA的稳态LED太阳光模拟器
高均匀辐照:45cm×45cm区域不均匀度仅1.8%(A级)。
超稳运行:20分钟波动≤0.5%(A+级)。
权威认证:国家计量院校准,国际标准合规。
工业级设计:适配光伏、材料、光催化等多场景。
紫创测控Luminbox凭借对光谱匹配度、辐照均匀性等核心指标的极致追求,已构建起覆盖LED/氙灯/卤素灯全技术路线的产品矩阵,技术持续创新、关键性能指标表现出色,为客户提供了优质的产品和全场景太阳光环境模拟解决方案。