【第19话:定位建图】SLAM点云配准之3D-3D ICP(Iterative Closest Point)方法详解
SLAM点云配准:ICP方法详解
在SLAM(同时定位与地图构建)中,点云配准是核心任务,用于对齐不同时刻采集的点云数据,实现精确的位姿估计和地图更新。ICP(Iterative Closest Point)方法是一种经典的点云配准算法,它通过迭代优化来计算两个点云之间的最优刚体变换(旋转和平移)。下面我将详细解释ICP方法,确保内容清晰可靠,并逐步展开。
1. ICP方法概述
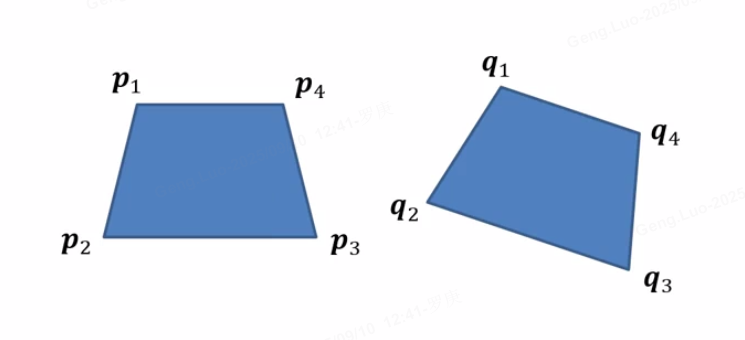
ICP算法的核心思想是通过迭代最小化点云之间的距离误差,来求解最优变换参数。给定源点云P={pi}P = \{ \mathbf{p}_i \}P={pi}和目标点云Q={qj}Q = \{ \mathbf{q}_j \}Q={qj},ICP的目标是找到一个刚体变换(旋转矩阵R\mathbf{R}R和平移向量t\mathbf{t}t),使变换后的源点云与目标点云对齐:
minR,t∑i∥qi−(Rpi+t)∥2 \min_{\mathbf{R}, \mathbf{t}} \sum_{i} \| \mathbf{q}_i - (\mathbf{R} \mathbf{p}_i + \mathbf{t}) \|^2 R,tmini∑∥qi−(Rpi+t)∥2
其中R\mathbf{R}R是旋转矩阵(满足R⊤R=I\mathbf{R}^\top \mathbf{R} = \mathbf{I}R⊤R=I),t\mathbf{t}t是平移向量。ICP通过以下步骤迭代求解。
2. ICP算法步骤
ICP是一个迭代过程,包含四个主要步骤:
-
步骤1:找到最近点对应关系
对于源点云PPP中的每个点pi\mathbf{p}_ipi,在目标点云QQQ中搜索其最近邻点qi\mathbf{q}_iqi:
qi=argminq∈Q∥q−pi∥ \mathbf{q}_i = \arg\min_{\mathbf{q} \in Q} \| \mathbf{q} - \mathbf{p}_i \| qi=argq∈Qmin∥q−pi∥
这通常使用KD树等数据结构加速搜索。 -
步骤2:计算最优变换
基于对应点对(pi,qi)(\mathbf{p}_i, \mathbf{q}_i)(pi,qi),计算最小化距离误差的R\mathbf{R}R和t\mathbf{t}t。目标函数为:
E(R,t)=∑i∥qi−(Rpi+t)∥2 E(\mathbf{R}, \mathbf{t}) = \sum_{i} \| \mathbf{q}_i - (\mathbf{R} \mathbf{p}_i + \mathbf{t}) \|^2 E(R,t)=i∑∥qi−(Rpi+t)∥2
通过以下子步骤求解:- 计算点云质心:
pˉ=1N∑ipi,qˉ=1N∑iqi \bar{\mathbf{p}} = \frac{1}{N} \sum_{i} \mathbf{p}_i, \quad \bar{\mathbf{q}} = \frac{1}{N} \sum_{i} \mathbf{q}_i pˉ=N1i∑pi,qˉ=N1i∑qi - 中心化点云:
pi′=pi−pˉ,qi′=qi−qˉ \mathbf{p}_i' = \mathbf{p}_i - \bar{\mathbf{p}}, \quad \mathbf{q}_i' = \mathbf{q}_i - \bar{\mathbf{q}} pi′=pi−pˉ,qi′=qi−qˉ - 构建协方差矩阵:
H=∑iqi′pi′⊤ \mathbf{H} = \sum_{i} \mathbf{q}_i' \mathbf{p}_i'^\top H=i∑qi′pi′⊤ - 使用SVD分解H=UΣV⊤\mathbf{H} = \mathbf{U} \mathbf{\Sigma} \mathbf{V}^\topH=UΣV⊤,最优旋转和平移为:
R=VU⊤,t=qˉ−Rpˉ \mathbf{R} = \mathbf{V} \mathbf{U}^\top, \quad \mathbf{t} = \bar{\mathbf{q}} - \mathbf{R} \bar{\mathbf{p}} R=VU⊤,t=qˉ−Rpˉ
注意:需确保det(R)=1\det(\mathbf{R}) = 1det(R)=1,否则调整符号。
- 计算点云质心:
-
步骤3:应用变换
使用计算出的R\mathbf{R}R和t\mathbf{t}t更新源点云:
Pnew={Rpi+t∣pi∈P} P_{\text{new}} = \{ \mathbf{R} \mathbf{p}_i + \mathbf{t} \mid \mathbf{p}_i \in P \} Pnew={Rpi+t∣pi∈P} -
步骤4:检查收敛
计算平均误差:
ϵ=1N∑i∥qi−(Rpi+t)∥ \epsilon = \frac{1}{N} \sum_{i} \| \mathbf{q}_i - (\mathbf{R} \mathbf{p}_i + \mathbf{t}) \| ϵ=N1i∑∥qi−(Rpi+t)∥
如果ϵ<τ\epsilon < \tauϵ<τ(预设阈值)或达到最大迭代次数,则停止;否则,返回步骤1。
整个算法流程可总结为以下伪代码:
def icp(source, target, max_iter=100, tol=1e-6):# 初始化变换R = np.eye(3) # 单位旋转矩阵t = np.zeros(3) # 零平移向量error = float('inf')for i in range(max_iter):# 找到最近点对应correspondences = find_nearest_neighbors(source, target)# 计算最优R和tR_new, t_new = compute_optimal_transform(correspondences)# 应用变换source = apply_transform(source, R_new, t_new)# 更新总变换R = R_new @ Rt = R_new @ t + t_new# 计算新误差new_error = compute_error(correspondences, R_new, t_new)# 检查收敛if abs(new_error - error) < tol:breakerror = new_errorreturn R, t
3. ICP方法的数学推导
ICP的核心是优化问题,其数学基础基于最小二乘。以下简化推导:
-
目标函数:
E(R,t)=∑i∥qi−Rpi−t∥2 E(\mathbf{R}, \mathbf{t}) = \sum_{i} \| \mathbf{q}_i - \mathbf{R} \mathbf{p}_i - \mathbf{t} \|^2 E(R,t)=i∑∥qi−Rpi−t∥2 -
平移优化:
固定R\mathbf{R}R,对t\mathbf{t}t求导:
∂E∂t=−2∑i(qi−Rpi−t)=0 \frac{\partial E}{\partial \mathbf{t}} = -2 \sum_{i} (\mathbf{q}_i - \mathbf{R} \mathbf{p}_i - \mathbf{t}) = 0 ∂t∂E=−2i∑(qi−Rpi−t)=0
解得:
t=qˉ−Rpˉ \mathbf{t} = \bar{\mathbf{q}} - \mathbf{R} \bar{\mathbf{p}} t=qˉ−Rpˉ -
旋转优化:
代入t\mathbf{t}t后,目标函数简化为:
E(R)=∑i∥(qi−qˉ)−R(pi−pˉ)∥2=∑i∥qi′−Rpi′∥2 E(\mathbf{R}) = \sum_{i} \| (\mathbf{q}_i - \bar{\mathbf{q}}) - \mathbf{R} (\mathbf{p}_i - \bar{\mathbf{p}}) \|^2 = \sum_{i} \| \mathbf{q}_i' - \mathbf{R} \mathbf{p}_i' \|^2 E(R)=i∑∥(qi−qˉ)−R(pi−pˉ)∥2=i∑∥qi′−Rpi′∥2
最大化∑iqi′⊤Rpi′\sum_{i} \mathbf{q}_i'^\top \mathbf{R} \mathbf{p}_i'∑iqi′⊤Rpi′,等价于最大化trace(R⊤H)\text{trace}(\mathbf{R}^\top \mathbf{H})trace(R⊤H)。通过SVD分解H=UΣV⊤\mathbf{H} = \mathbf{U} \mathbf{\Sigma} \mathbf{V}^\topH=UΣV⊤,最优解为R=VU⊤\mathbf{R} = \mathbf{V} \mathbf{U}^\topR=VU⊤。
4. ICP方法的优缺点
-
优点:
- 简单高效,计算复杂度为O(NlogN)O(N \log N)O(NlogN)(使用KD树加速)。
- 适用于刚性变换(旋转和平移),在初始位置较好时收敛快。
- 广泛集成于SLAM框架(如LOAM、Cartographer),用于局部点云对齐。
-
缺点:
- 对初始位置敏感:如果初始偏差大,可能陷入局部最优。
- 假设点云完全重叠:在部分重叠或噪声大时性能下降。
- 仅处理刚体变换:无法处理非刚性变形。
5. 在SLAM中的应用
在SLAM中,ICP常用于:
- 帧到帧配准:实时对齐连续点云,估计机器人位姿变化。
- 局部地图优化:将新点云与局部子地图对齐,减少累积误差。
- 回环检测:对齐历史点云以检测回环,优化全局地图。
为提升鲁棒性,常结合其他技术,如点云滤波(去除噪声)或特征匹配(如FPFH)来初始化ICP。
总结
ICP是一种基础且强大的点云配准方法,通过迭代优化最小化点间距离,实现高效配准。尽管有局限性,但其简单性和效率使其成为SLAM中不可或缺的组件。理解ICP的原理和实现,有助于深入掌握SLAM的点云处理流程。