遥测自跟踪天线系统组成、特点、功能、工作流程
遥测自跟踪天线目的是追踪和接收视距范围内飞行目标发出的遥测信号,并输出左旋和右旋圆极化射频信号到遥测接收机,从而完成遥测数据的解调与接收。
遥测自跟踪天线系统由8个子系统构成,包括:天线子系统、信道子系统、跟踪子系统、伺服控制子系统、电源子系统、结构子系统、配套子系统以及天线控制子系统。其组成框图。

天线组成
-
• 天线子系统
天线子系统系统包含天线面、和差器和自跟踪组件,其主要功能是接收无线遥测信号,并输出左旋和右旋圆极化射频信号。
-
• 信道子系统
信道子系统由LNA、腔体滤波器、AGCA和功分器组成。它负责对接收到的射频信号进行放大,并将功率分配给自跟踪接收机和遥测接收机。采用AGCA的设计,是为了提高系统的动态范围。
-
• 跟踪子系统
由跟踪接收机和组合导航系统构成。跟踪接收机解算方位和俯仰的误差电压,并将其提供给伺服控制器以实现信号的自动跟踪。组合导航仪可实时提供天线的位置和姿态参数给伺服控制器,为天线自跟踪和GNSS外引导数据跟踪提供稳定的平台。
-
• 伺服控制子系统
伺服控制子系统由伺服控制器、伺服电机、驱动器、光电编码器、电气限位开关等组件组成。伺服控制器通过网络与上位机连接,接收远程控制指令;同时,它也通过串口接收跟踪接收机和组合导航仪的数据,从而实现对天线方位和俯仰转动的精确控制,最终完成天线的跟踪与指向。

核心子系统
-
• 电源子系统
电源子系统由保险丝、220VAC电源滤波器模块和电源模块等组成。该系统负责将220VAC交流电转换为48VDC和12VDC。其中,48VDC用于为伺服直流电机供电,而12VDC则为整个系统提供电源。电源滤波器模块用于输入电源滤波,确保设备在复杂供电环境下的电磁兼容性。
-
• 结构子系统
该子系统包括A/E型座架机箱、方位转台和高频滑环。座架结构采用方位、俯仰两轴设计,并利用射频滑环,实现方位360°无限旋转。
-
• 配套子系统
配套子系统则负责提供必要的附件和辅助功能。监控摄像机可提供近距离监视,以观察跟踪目标和跟踪效果;天线安装底座和支架作为附件,便于移动和便携式安装;加热器和温度传感器用于控制机箱温度在指定范围内;包装箱、配套电缆及配套工具则保障设备的正常使用。
-
• 天线控制子系统
天线控制子系统由网络交换机和人机交互组件组成。人机交互组件安装在外部计算机中,负责完成系统内部数据以及与外部计算机的数据交互,从而实现网络远程控制和天线工作状态的监控。
配套的天线控制软件能够监测天线的工作状态,并配置天线的频率参数、运动参数和跟踪模式等。
系统工作流程
遥测自跟踪天线的工作流程:
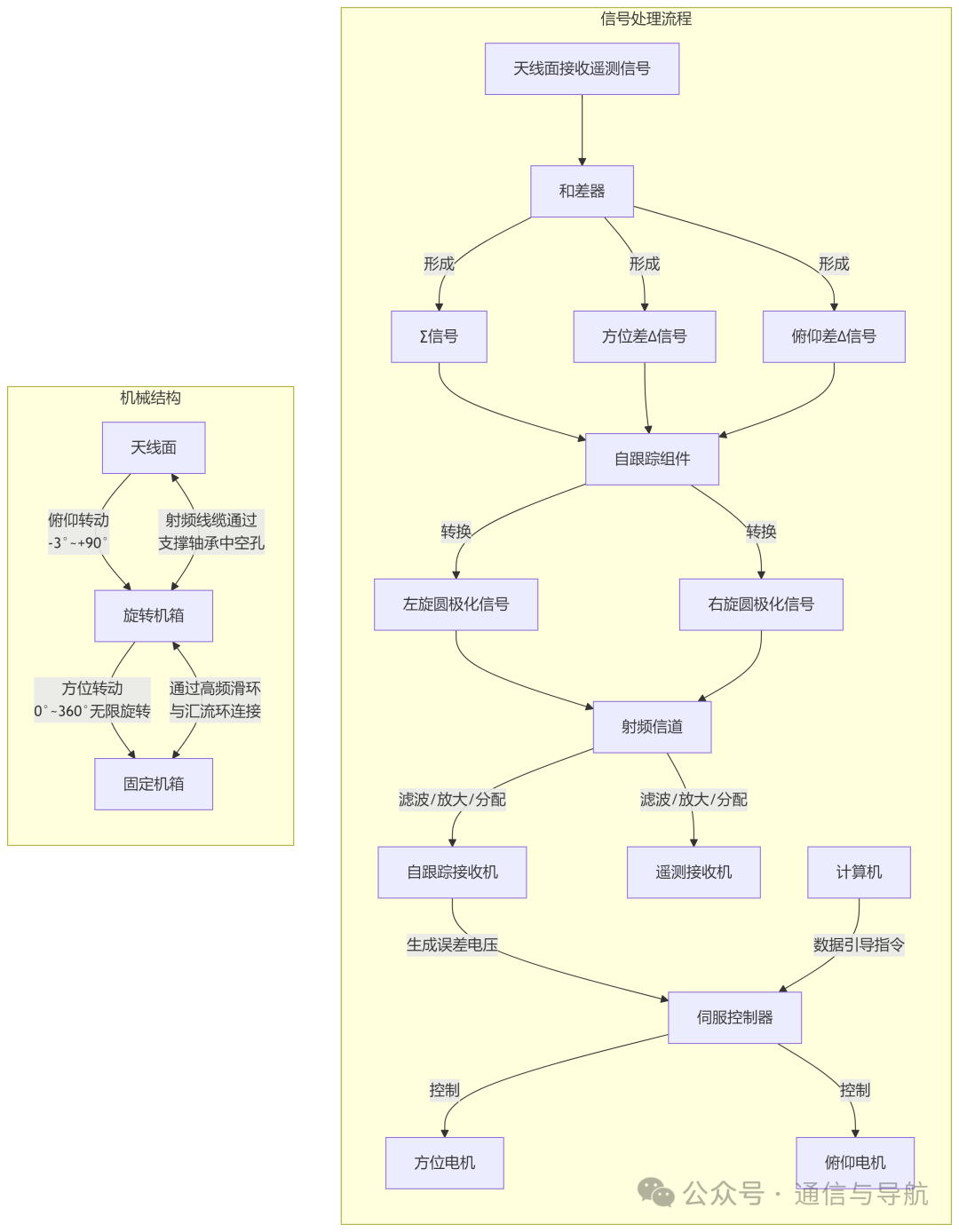
遥测自跟踪天线工作流程
天线面接收遥测信号后,和差器将之形成∑信号、方位差和俯仰差信号。自跟踪组件将这些信号转换为单通道单脉冲的左旋和右旋圆极化信号。基于此,射频信道对信号进行滤波、放大,并将功率分配给自跟踪接收机和遥测接收机。伺服控制器接收自跟踪接收机传来的误差电压,以此控制伺服电机完成自跟踪;同时,它也能接收计算机的控制指令,完成数据引导跟踪。
结构布置划分为天线面、旋转机箱和固定机箱三个部分。天线面通过俯仰电机与旋转机箱连接,其俯仰转动范围为-3°~+90°,射频线缆通过支撑轴承的中空孔连接。旋转机箱则通过方位电机与固定机箱连接,方位转动范围为0°~360°无限旋转,通过高频滑环与汇流环实现信号线连接。
遥测接收机可以与遥测自跟踪天线采用一体化设计,即安装在遥测自跟踪天线的机箱内,对外提供网口数据接口,直接连接外部设备。
遥测自跟踪天线对外输出左旋和右旋信号,也能够连接外部的遥测接收机。
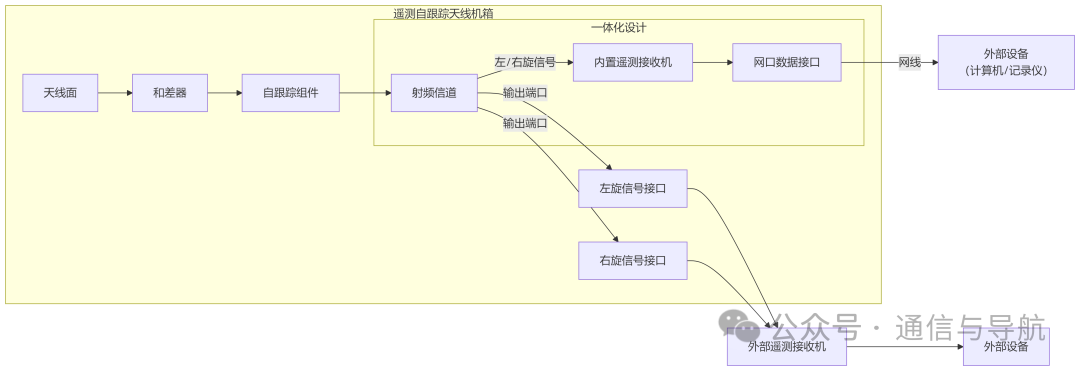
天线输出信号
功能特性
-
1. 伺服驱动:具备通过伺服机构驱动天线精确指向飞行目标的功能。
-
2. 多样化跟踪模式:提供自动跟踪、GPS/BD数字引导跟踪、程序跟踪、手动跟踪、手动置位、自动搜索和记忆跟踪等多种功能。
-
• 自动跟踪:根据跟踪接收机提供的方位、俯仰误差数据,控制天线完成自动跟踪。
-
• GPS/BD数字引导跟踪:接收跟踪目标的GPS/北斗定位数据(经度、纬度、高度等),结合天线自身的定位数据和航向角定向数据进行指向解算,从而控制天线完成跟踪。
-
• 程序跟踪:通过软件预置的程序数据自动引导天线按设定的轨迹运动。若飞行目标轨迹与预设轨迹高度吻合,遥测天线将持续稳定跟踪目标,避免信号中断。
-
• 手动跟踪:通过鼠标或手柄控制天线进行跟踪,可手动调整天线的角度指向,并可设置跟踪速度。
-
• 手动置位:利用预先存储或手动输入的天线指向数据,完成天线的精确置位。
-
• 自动搜索:天线将按照预定的扇扫搜索范围、扫描步进和搜索顺序,自动搜寻目标信号。根据接收到的信号强度、自动跟踪门限、跟踪接收机误差电压及其他判定条件,系统会给出捕获目标的提示或自动进入自动跟踪状态。扇扫搜索范围、扫描步进、扫描速度和搜索顺序均可设置,搜索时间可控,且不超过30秒。
-
• 记忆跟踪:当天线处于自动跟踪状态时,一旦目标信号丢失,它将自动进入记忆跟踪状态,按信号丢失前的状态继续跟踪10秒钟。在此期间,若目标重新出现,系统将自动转入跟踪状态。若信号丢失时间超过10秒,软件将控制系统进入待机状态。记忆跟踪有两种模式:惯性跟踪和原地不动。
-
• 组合导航:配置GPS/BD双天线MEMS组合导航仪,能够自主完成天线定位、定向,以及天线基座的姿态角测量,使天线系统适用于车载、船载等平台环境。
-
• 待机功能:具备待机功能,可通过远程控制使天线进入静止状态,天线朝上。系统上电后,天线默认处于待机状态。
-
• 远程控制:配备RJ45控制接口,支持1000M网络,可与上位机连接,通过天线控制软件完成系统参数设置、控制和状态监视,包括供电、连接和设备告警等。
-
• 日志记录:具备跟踪轨迹自动记录和设备运行日志功能,天线能够实时输出俯仰角、方位角等角度信息。
-
• 易用性:设备易于使用、维护和维修,人机交互界面友好。
-
• 附件配置:设备附带射频信号传输线缆、天线控制网络线缆、电源供电线缆、天线支架及天线安装底座等。
总结
文章介绍了遥测自跟踪天线系统的核心构成、工作流程及主要功能。多样化的跟踪模式,如自动跟踪、GPS/BD引导跟踪和记忆跟踪等,极大地提升了系统在复杂动态环境下的适应性和可靠性。
遥测自跟踪天线系统不仅是遥测技术的关键组成部分,也能运用在其他无线通信领域的目标追踪上,为无人机、卫星等飞行器的遥测任务提供了强有力的技术保障。
码字不易,大家觉得文章不错,就安排一下一键三连吧:点赞、分享、推荐。
推荐阅读:
遥测自跟踪天线具体是怎么做自跟踪的?
用比较不严谨的文字介绍遥测自跟踪天线的基本原理