LSTM核心参数与输入输出解读
快速一览表
# 前向传播 output, (hn, cn) = lstm(input, (h0, c0))
我先用一个表格来总结LSTM的核心参数和不同结构下的输出形状:
| 组件/结构 | 参数/输出 | 说明 | 单层单向示例 | 多层单向示例 | 单层双向示例 | 多层双向示例 |
|---|---|---|---|---|---|---|
| 核心参数 | input_size | 输入特征维度 | - | - | - | - |
hidden_size | 隐藏层特征维度 | - | - | - | - | |
num_layers | LSTM层数 | - | - | - | - | |
bidirectional | 是否为双向 | - | - | - | - | |
输出 output | 形状 | (序列长度, 批次大小, 隐藏维度×方向数) (当 batch_first=True时批次大小和序列长度位置互换) | (5, 3, 20)(序列5,批次3,隐藏20) | (5, 3, 20)(序列5,批次3,隐藏20) | (5, 3, 40)(序列5,批次3,隐藏40=20x2) | (5, 3, 40)(序列5,批次3,隐藏40=20x2) |
| 含义 | 最后一层,所有时间步的隐藏状态 | 最后一层所有时间步输出 | 最后一层所有时间步输出 | 最后一层所有时间步输出,含双向信息 | 最后一层所有时间步输出,含双向信息 | |
隐藏状态 hn | 形状 | (层数×方向数, 批次大小, 隐藏维度) | (1, 3, 20)(1层,批次3,隐藏20) | (2, 3, 20)(2层,批次3,隐藏20) | (2, 3, 20)(2方向,批次3,隐藏20) | (4, 3, 20)(4=2层x2方向,批次3,隐藏20) |
| 含义 | 所有层的最后一个时间步的隐藏状态 | 唯一层最后时间步隐藏状态 | 所有层(此处2层)最后时间步隐藏状态 | 两个方向最后时间步隐藏状态 | 所有层及方向最后时间步隐藏状态 | |
细胞状态 cn | 形状 | (层数×方向数, 批次大小, 隐藏维度) | 同hn | 同hn | 同hn | 同hn |
| 含义 | 所有层的最后一个时间步的细胞状态(长期记忆) | 唯一层最后时间步细胞状态 | 所有层最后时间步细胞状态 | 两个方向最后时间步细胞状态 | 所有层及方向最后时间步细胞状态 |
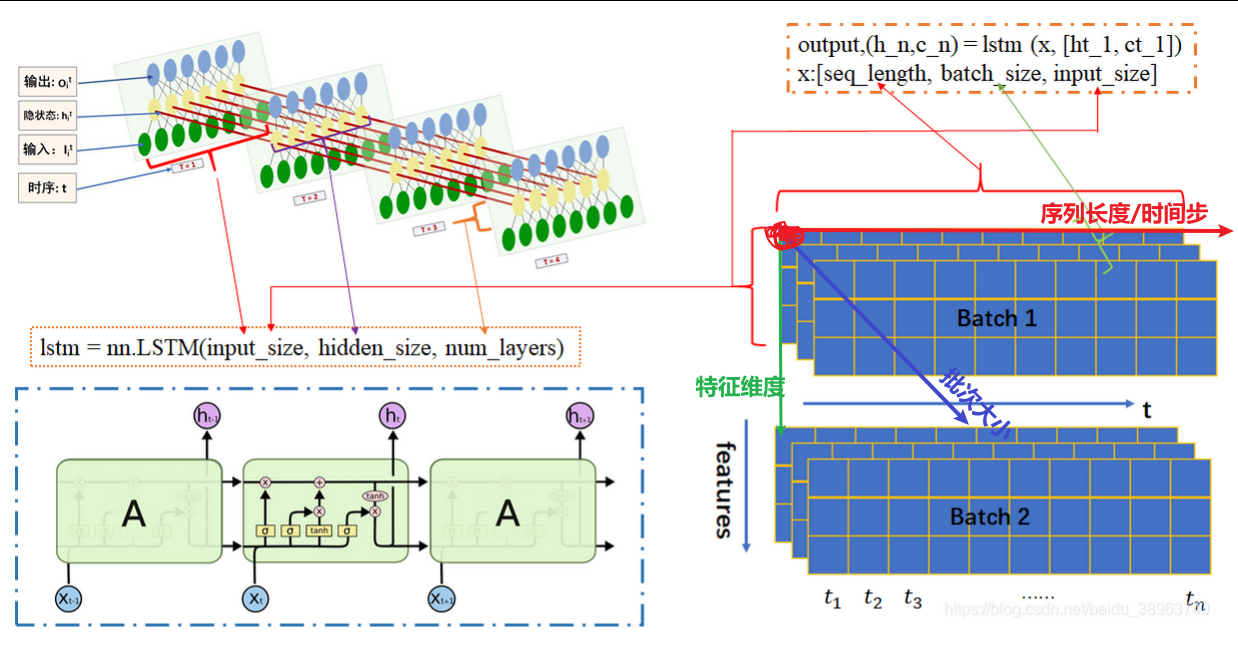
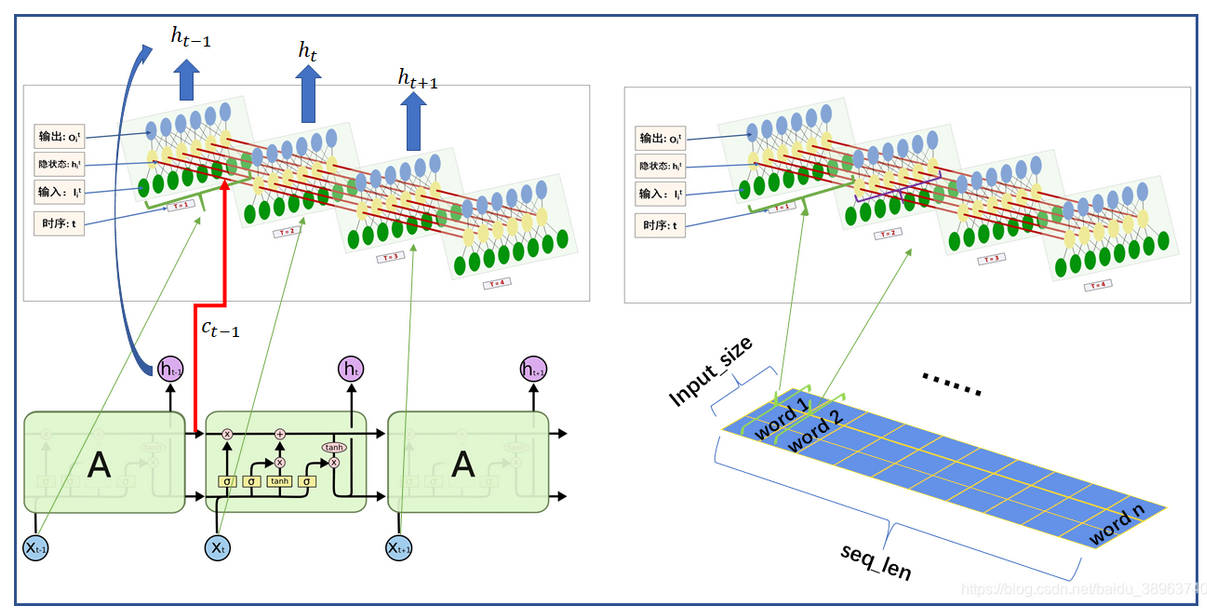
下图是我手动推导关于LSTM前向传播的一个图:

LSTM核心参数与输入输出解读
lstm核心参数
在PyTorch中,我们使用torch.nn.LSTM来创建LSTM层,它的核心参数包括:
-
input_size:输入数据在每个时间步的特征维度。 -
hidden_size:隐藏状态h的特征维度,决定了LSTM的输出能力。
-
num_layers:LSTM的层数。层数大于1时,多个LSTM层将堆叠,前一层的输出作为下一层的输入(深层循环神经网络)。 -
batch_first:当设置为True时,输入和输出张量的形状为(批次大小, 序列长度, 特征维度),这更符合常见的习惯。默认为False,即(序列长度, 批次大小, 特征维度)。 -
bidirectional:是否使用双向LSTM。双向LSTM会沿着序列的两个方向(正向和反向)分别处理序列,然后将每个时间步两个方向的隐藏状态进行合并(通常是拼接),从而捕获序列的前向和后向信息
输入:(input,(h0,c0))
LSTM的输入主要包括:
input:序列数据本身。其形状为(序列长度, 批次大小, 输入特征维度),如果设置了batch_first=True,则为(批次大小, 序列长度, 输入特征维度)-
h0:初始隐藏状态。形状为(层数 * 方向数, 批次大小, 隐藏层维度)。对于单向LSTM,方向数为1;对于双向LSTM,方向数为2。如未提供,默认为零。 -
c0:初始细胞状态。形状与h0相同。如未提供,默认为零。
输出:(output(hn,cn))
LSTM的输出包括:
-
output:包含最后一层LSTM每个时间步的隐藏状态。其形状为(序列长度, 批次大小, 隐藏层维度 * 方向数)(若batch_first=True则批次大小在前)。对于双向LSTM,每个时间步的输出是正向和反向隐藏状态的拼接,因此特征维度是hidden_size * 2。
-
hn:所有层(对于双向LSTM,包含所有方向)在最后一个有效时间步的隐藏状态。形状为(层数 * 方向数, 批次大小, 隐藏层维度)。 -
cn:所有层(对于双向LSTM,包含所有方向)在最后一个有效时间步的细胞状态。形状与hn相同。
理解output和hn之间的关系很重要:
-
在单向LSTM中,
output的最后一个时间步(output[-1])与hn的最后一层(hn[-1])是相同的。output包含所有时间步的隐藏状态,而hn是所有层的最后一个时间步的隐藏状态。
-
在双向LSTM中,
output的每个时间步都包含了正向和反向的隐藏状态。output的第一个时间步对应反向LSTM的最后一个时间步的隐藏状态(即hn的对应位置),而output的最后一个时间步对应正向LSTM的最后一个时间步的隐藏状态(即hn的对应位置)。
关于output和hn的使用场景:
-
如果你需要每个时间步的输出(例如序列标注任务,如词性标注,每个词都需要输出),那么你应该使用
output。 -
如果你只需要整个序列的最终汇总信息(例如序列分类任务,如文本情感分析,整个句子只需要一个分类结果),那么使用
hn(通常是最后一层或特定层的最后隐藏状态)是常见且高效的做法。对于双向LSTM,通常会将hn的最后两个隐藏状态(代表正向和反向的最终状态)进行拼接或聚合,以得到整个序列的完整表示。
不同LSTM结构示例
一、处理等长的序列
1.单层单向LSTM
(1)batch_first默认为False
import torch
import torch.nn as nn# 定义参数
input_size = 3 # 每个时间步输入特征维度为3
seq_len = 150 # 序列长度为150
batch_size = 16 # 批次大小为16
hidden_size = 64 # 隐藏层特征维度为64
num_layers = 1 # 一层LSTM
num_directions = 1 # 单向,方向数为1# 创建单层单向LSTM
lstm = nn.LSTM(input_size, hidden_size, num_layers)# 准备输入数据 input(序列长度, 批次大小, 输入特征维度)
input = torch.randn(seq_len, batch_size, input_size) # (150,16,3)
# 初始化隐藏状态和细胞状态 h0,c0(层数×方向数, 批次大小, 隐藏维度)
h0 = torch.randn(num_layers * num_directions, batch_size, hidden_size) # (1*1,16,64)
c0 = torch.randn(num_layers * num_directions, batch_size, hidden_size)# 前向传播 output(序列长度, 批次大小, 隐藏维度×方向数)
output, (hn, cn) = lstm(input, (h0, c0))print(f"单层单向LSTM:")
print(f"output shape: {output.shape}") # (150, 16, 64)
print(f"hn shape: {hn.shape}") # (1, 16, 64)
print(f"cn shape: {cn.shape}") # (1, 16, 64)
# 验证 output[-1] == hn[-1]
print(torch.allclose(output[-1], hn[-1])) # 应为 True(2)batch_first设置为True
如果再将batch_first=True, 则
输入input为 (batch_size, seq_len, input_size),
输出output为 (batch_size, seq_len, hidden_dim*num_directions)
# 创建单层单向LSTM (batch_first=True)
lstm = nn.LSTM(input_size, hidden_size, num_layers,batch_first=True) # 将batch之前,更加符合直观习惯# 准备输入数据 input(批次大小, 序列长度, 输入特征维度)
input = torch.randn(batch_size, seq_len, input_size) # (16,150,3)
# 初始化隐藏状态和细胞状态 h0,c0(层数×方向数, 批次大小, 隐藏维度)
h0 = torch.randn(num_layers * num_directions, batch_size, hidden_size) # (1*1,16,64)
c0 = torch.randn(num_layers * num_directions, batch_size, hidden_size)# 前向传播 output(批次大小, 序列长度, 隐藏维度×方向数)
output, (hn, cn) = lstm(input, (h0, c0))print(f"单层单向LSTM:")
print(f"output shape: {output.shape}") # (16, 150, 64)
print(f"hn shape: {hn.shape}") # (1, 16, 64)
print(f"cn shape: {cn.shape}") # (1, 16, 64)# 验证 output 的最后一个时间步与 hn 的最后一层相同
print(torch.allclose(output[:, -1, :], hn[-1])) # 应为 True总结:【前提:batch_first=True】
output,(hn,cn) = lstm(input,(h0,c0))
由于
output(序列长度, 批次大小, 隐藏维度×方向数):返回最后一层,所有时间步的隐藏状态
hn(层数×方向数, 批次大小, 隐藏维度):返回所有层的最后一个时间步的隐藏状态
所以在单层单向LSTM中,输出的最后一个时间步与隐藏状态的最后一层相同,最终取的都是最后一层+最后一个时间步的隐藏状态。即:
output[:,-1,:] = hn[-1,:,:] = hn[0]
1.batch_first只会影响input、output的维度,而不会影响h0、c0、hn、cn这些隐藏状态和细胞状态的维度。
2.两层单向LSTM
多层LSTM通过堆叠多个LSTM层来提取更深层的序列特征,上一层的输出作为下一层的输入。
(1)batch_first默认为False
import torch
import torch.nn as nn# 定义参数
input_size = 3 # 每个时间步输入特征维度为3
seq_len = 150 # 序列长度为150
batch_size = 16 # 批次大小为16
hidden_size = 64 # 隐藏层特征维度为64
num_layers = 2 # 两层LSTM
num_directions = 1 # 单向,方向数为1# 创建多层单向LSTM
lstm = nn.LSTM(input_size, hidden_size, num_layers) # batch_first默认为False# 准备输入数据 input(序列长度, 批次大小, 输入特征维度)
input = torch.randn(seq_len, batch_size, input_size) # (150,16,3)
# 初始状态 h0,c0(层数×方向数, 批次大小, 隐藏维度)
h0 = torch.randn(num_layers * num_directions, batch_size, hidden_size) # (2*1,16,64)
c0 = torch.randn(num_layers * num_directions, batch_size, hidden_size)# 前向传播 output(序列长度, 批次大小, 隐藏维度×方向数)
output, (hn, cn) = lstm(input, (h0, c0))print(f"\n多层单向LSTM:")
print(f"output shape: {output.shape}") # (150, 16, 64*1) # 注意:output仍是最后一层的输出
print(f"hn shape: {hn.shape}") # (2, 16, 64) # 两层最后时间步的隐藏状态
print(f"cn shape: {cn.shape}") # (2, 16, 64)# 验证 output 的最后一个时间步与 hn 的最后一层相同
print(f"output[-1,:,:] == hn[-1]: {torch.allclose(output[-1,:,:], hn[-1])}")
(2)batch_first设置为True
# 创建多层单向LSTM (batch_first=True)
lstm = nn.LSTM(input_size, hidden_size, num_layers, batch_first=True)# 准备输入数据 input(批次大小, 序列长度, 输入特征维度)
input = torch.randn(batch_size, seq_len, input_size) # (16,150,3)
# 初始化隐藏状态和细胞状态 h0,c0(层数×方向数, 批次大小, 隐藏维度)
h0 = torch.randn(num_layers * num_directions, batch_size, hidden_size) # (2*1, 16, 20)
c0 = torch.randn(num_layers * num_directions, batch_size, hidden_size)# output(批次大小, 序列长度, 隐藏维度×方向数)
output, (hn, cn) = lstm(input, (h0, c0))print(f"\n多层单向LSTM (batch_first=True):")
print(f"output shape: {output.shape}") # (16, 150, 64)
print(f"hn shape: {hn.shape}") # (2, 16, 64)
print(f"cn shape: {cn.shape}") # (2, 16, 64)# 验证 output 的最后一个时间步与 hn 的最后一层相同
print(f"output[:, -1, :] == hn[-1]: {torch.allclose(output[:, -1, :], hn[-1])}")
总结:【前提:batch_first=True】
output,(hn,cn) = lstm(input,(h0,c0))
由于
output(序列长度, 批次大小, 隐藏维度×方向数):返回最后一层,所有时间步的隐藏状态
hn(层数×方向数, 批次大小, 隐藏维度):返回所有层的最后一个时间步的隐藏状态
所以,在多层单向LSTM中,输出的最后一个时间步与隐藏状态的最后一层相同。即:
output[:,-1,:] = hn[-1,:,:] != hn[0]
1.lstm层数只会改变h0、c0、hn、cn这些隐藏状态和细胞状态的维度,而不会改变output的维度。
3.单层双向LSTM
双向LSTM通过增加一个从序列末尾向开头处理的反向LSTM,能够同时捕捉前后文信息。
(1)batch_first默认为False
import torch
import torch.nn as nn# 定义参数
input_size = 3 # 每个时间步输入特征维度为3
seq_len = 150 # 序列长度为150
batch_size = 16 # 批次大小为16
hidden_size = 64 # 隐藏层特征维度为64
num_layers = 1 # 1层LSTM
num_directions = 2 # 双向,方向数为2# 创建单层双向LSTM
lstm = nn.LSTM(input_size, hidden_size, num_layers, bidirectional=True) # 双向LSTM# 准备输入数据 input(序列长度, 批次大小, 输入特征维度)
input = torch.randn(seq_len, batch_size, input_size) # (150, 16, 3)
# 初始化隐藏状态和细胞状态 h0,c0(层数×方向数, 批次大小, 隐藏维度)
h0 = torch.randn(num_layers * num_directions, batch_size, hidden_size) # (1*2, 16, 64)
c0 = torch.randn(num_layers * num_directions, batch_size, hidden_size)# 前向传播 output(序列长度, 批次大小, 隐藏维度×方向数)
output, (hn, cn) = lstm(input, (h0, c0))print(f"\n单层双向LSTM:")
print(f"output shape: {output.shape}") # (150, 16, 64*2) 因为是双向LSTM,每个时间步的输出是正向和反向的拼接
print(f"hn shape: {hn.shape}") # (1*2, 16, 64) 两个方向的最后隐藏状态(前者hn[0,:,:]是正向最后隐藏状态,后者hn[1,:,:]是反向最后隐藏状态)
print(f"cn shape: {cn.shape}") # (1*2, 16, 64) 两个方向的最后记忆状态# 验证 output 最后一个时间步的前半部分对应正向LSTM的最后隐藏状态,第一个时间步的后半部分对应反向LSTM的最后隐藏状态
print(torch.allclose(output[-1, :, :hidden_size], hn[0])) # 正向最后时间步
print(torch.allclose(output[0, :, hidden_size:], hn[1])) # 反向最后时间步 (注意是0位置)(2)batch_first设置为True
# 创建单层双向LSTM (batch_first=True)
lstm = nn.LSTM(input_size, hidden_size, num_layers, bidirectional=True, batch_first=True) # 将模型的input和output的batch_size参数前置# 准备输入数据 input(批次大小, 序列长度, 输入特征维度)
input = torch.randn(batch_size, seq_len, input_size) # (16, 150, 3)
# 初始化隐藏状态和细胞状态 h0,c0(层数×方向数, 批次大小, 隐藏维度)
h0 = torch.randn(num_layers * num_directions, batch_size, hidden_size) # (1*2, 16, 64)
c0 = torch.randn(num_layers * num_directions, batch_size, hidden_size)# 前向传播 output(批次大小, 序列长度, 隐藏维度×方向数)
output, (hn, cn) = lstm(input, (h0, c0))print(f"\n单层双向LSTM (batch_first=True):")
print(f"output shape: {output.shape}") # (16, 150, 64*2)
print(f"hn shape: {hn.shape}") # (1*2, 16, 64)
print(f"cn shape: {cn.shape}") # (1*2, 16, 64)# 验证双向LSTM的输出关系
# output的最后一个时间步的前半部分 对应 正向LSTM的最后隐藏状态
# output的第一个时间步的后半部分 对应 反向LSTM的最后隐藏状态
print(f"正向验证: {torch.allclose(output[:, -1, :hidden_size], hn[0])}") # hn[0]是正向LSTM的最后隐藏状态
print(f"反向验证: {torch.allclose(output[:, 0, hidden_size:], hn[1])}") # hn[1]是反向LSTM的最后隐藏状态注意:【前提:batch_first = True】
output(序列长度, 批次大小, 隐藏维度×方向数):双向LSTM,每个时间步的输出是正向和反向的拼接。
其中,output[:, -1, :hidden_size] 对应 output 最后一个时间步的前半部分,即正向LSTM的最后隐藏状态。
其中,output[:, 0, hidden_size:] 对应 output 第一个时间步的后半部分,即反向LSTM的最后隐藏状态。
hn(层数×方向数, 批次大小, 隐藏维度):双向LSTM,需要手动拼接
前者hn[-2,:,:]是最后一层 正向最后隐藏状态,
后者hn[-1,:,:]是最后一层 反向最后隐藏状态
1.lstm层数只会改变h0、c0、hn、cn这些隐藏状态和细胞状态的维度,而不会改变output的维度。
2.而方向数会改变output+h0、c0、hn、cn的维度
4.多层双向LSTM
多层双向LSTM结合了深度结构和双向处理的优势,能捕捉更复杂的序列依赖关系。
(1)batch_first默认为False
import torch
import torch.nn as nn# 定义参数
input_size = 3 # 每个时间步输入特征维度为3
seq_len = 150 # 序列长度为150
batch_size = 16 # 批次大小为16
hidden_size = 64 # 隐藏层特征维度为64
num_layers = 2 # 2层LSTM
num_directions = 2 # 双向,方向数为2# 创建多层双向LSTM
lstm = nn.LSTM(input_size, hidden_size, num_layers, bidirectional=True)# 准备输入数据 input(序列长度, 批次大小, 输入特征维度)
input = torch.randn(seq_len, batch_size, input_size) # (150, 16, 3)
# 初始化隐藏状态和细胞状态 h0,c0(层数×方向数, 批次大小, 隐藏维度)
h0 = torch.randn(num_layers * num_directions, batch_size, hidden_size) # (2*2, 16, 64)
c0 = torch.randn(num_layers * num_directions, batch_size, hidden_size)# 前向传播 output(序列长度, 批次大小, 隐藏维度×方向数)
output, (hn, cn) = lstm(input, (h0, c0))print(f"\n多层双向LSTM:")
print(f"output shape: {output.shape}") # (150, 16, 64*2)
print(f"hn shape: {hn.shape}") # (2*2, 16, 64) # 2层 * 2方向 = 4
print(f"cn shape: {cn.shape}") # (2*2, 16, 64) # 验证双向LSTM的输出关系
# output的最后一个时间步的前半部分 对应 正向LSTM的最后隐藏状态
# output的第一个时间步的后半部分 对应 反向LSTM的最后隐藏状态
print("验证双向LSTM的输出关系:")
print("output的最后一个时间步的前半部分 对应 正向LSTM的最后隐藏状态:", torch.allclose(output[-1, :, :hidden_size], hn[-2, :, :])) # 最后一层正向LSTM的最后隐藏状态 hn[-2, :, :] = hn[2]
print("output的第一个时间步的后半部分 对应 反向LSTM的最后隐藏状态:", torch.allclose(output[0, :, hidden_size:], hn[-1, :, :])) # 最后一层反向LSTM的最后隐藏状态 hn[-1, :, :] = hn[3]
(2)batch_first设置为True
# 创建多层双向LSTM
lstm = nn.LSTM(input_size, hidden_size, num_layers, bidirectional=True, batch_first=True) # 准备输入数据 input(批次大小,序列长度,输入特征维度)
input = torch.randn(batch_size, seq_len, input_size) # (16, 150, 3)
# 初始化隐藏状态和细胞状态 h0,c0(层数×方向数, 批次大小, 隐藏维度)
h0 = torch.randn(num_layers * num_directions, batch_size, hidden_size) # (2*2, 16, 64)
c0 = torch.randn(num_layers * num_directions, batch_size, hidden_size)# 前向传播 output(批次大小, 序列长度, 隐藏维度×方向数)
output, (hn, cn) = lstm(input, (h0, c0))print(f"\n多层双向LSTM (batch_first=True):")
print(f"output shape: {output.shape}") # (16, 150, 64*2)
print(f"hn shape: {hn.shape}") # (2*2, 16, 64)
print(f"cn shape: {cn.shape}") # (2*2, 16, 64)# 验证双向LSTM的输出关系
# 验证双向LSTM的输出是否正确
print("output的最后一个时间步的前半部分 对应 正向LSTM的最后隐藏状态:", torch.allclose(output[:, -1, :hidden_size], hn[-2, :, :])) # 最后一层正向LSTM的最后隐藏状态 hn[-2, :, :] = hn[2]
print("output的第一个时间步的后半部分 对应 反向LSTM的最后隐藏状态:", torch.allclose(output[:, 0, hidden_size:], hn[-1, :, :])) # 最后一层反向LSTM的最后隐藏状态 hn[-1, :, :] = hn[3]总结:
output(批次大小, 序列长度, 隐藏维度×方向数):无论多少层的双向LSTM,输出的都是最后一层的每个时间步的隐藏状态,且每个时间步的隐藏状态是前向和后向的拼接。
其中,output[:, -1, :hidden_size] 对应 output 最后一个时间步的前半部分,即正向LSTM的最后隐藏状态。
其中,output[:, 0, hidden_size:] 对应 output 第一个时间步的后半部分,即反向LSTM的最后隐藏状态。
hn(层数×方向数, 批次大小, 隐藏维度):双向LSTM,最后一层的正向最后隐藏状态和反向最后隐藏状态需要手动拼接。
其中,hn[-2,:,:] 对应 最后一层 正向最后隐藏状态。
其中,hn[-1,:,:] 对应 最后一层 反向最后隐藏状态。
例如:由于是两层双向LSTM,所以hn的形状是(层数×方向数, 批次大小, 隐藏维度),即(2*2, 16, 64)
其中,hn[0,:,:] 对应 第一层lstm 正向最后隐藏状态。
其中,hn[1,:,:] 对应 第一层lstm 反向最后隐藏状态。
其中,hn[2,:,:] 对应 第二层lstm 正向最后隐藏状态。同时也是 最后一层lstm 正向最后隐藏状态,即hn[-2,:,:]
其中,hn[3,:,:] 对应 第二层lstm 反向最后隐藏状态。同时也是 最后一层lstm 反向最后隐藏状态,即hn[-1,:,:]
所以,可以得出:无论lstm有多少层,都可以通过hn[-2,:,:]和hn[-1,:,:]来获取最后一层lstm的正向最后隐藏状态和反向最后隐藏状态。
最后一层lstm 正向最后隐藏状态 = hn[-2,:,:] 等价于 output[:, -1, :hidden_size] (前提batch_first=True)
最后一层lstm 反向最后隐藏状态 = hn[-1,:,:] 等价于 output[:, 0, hidden_size:]
上面的例子都是在处理等长的序列,那么如果序列长度不同,该怎么办?
接下来再加一个条件,即在batch_first=True的条件上,通过nn.utils.rnn.pack_padded_sequence打包来处理变长序列(序列分类任务,无需解包),请分别将4种不同LSTM结构示例代码重新返回一下,注意:每种例子要分别给出两个实现方案(方案一:通过hidden直接取隐藏状态;方案二:通过output取每个序列的最后一个有效输出)
二、处理不等长的序列(batch_first=True)
前提:(batch_first=True + pack_padded_sequence打包序列)
1.单层单向LSTM
基础设置:
import torch
import torch.nn as nn
from torch.nn.utils.rnn import pack_padded_sequence, pad_packed_sequence# 定义参数
input_size = 5 # 输入特征维度
hidden_size = 64 # 隐藏层神经元数量
batch_size = 3 # 批次大小
max_seq_len = 10 # 最大序列长度# 创建变长序列数据(就模拟生成了3条序列,这里就当batch_size=3)
sequences = [torch.randn(8, input_size), # 长度8torch.randn(9, input_size), # 长度9torch.randn(10, input_size) # 长度10
]# 实际长度
lengths = torch.tensor([8, 9, 10], dtype=torch.long) # 序列长度一般设置长整型(int64)# 填充序列 (batch_first=True) # pad_sequence返回一个B x T x * 的Tensor,其中T是最长序列的长度。
padded_sequences = torch.nn.utils.rnn.pad_sequence([seq for seq in sequences], batch_first=True, padding_value=0.0
)print(f"填充后序列形状: {padded_sequences.shape}") # (3, 10, 5)
padded_sequences方案一:通过hidden取最后一层lstm的 最后一个时间步的隐藏状态
# 创建单层单向LSTM
lstm = nn.LSTM(input_size, hidden_size, num_layers=1, batch_first=True) # batch_first=True# 按长度降序排序
lengths_sorted, sorted_idx = torch.sort(lengths, descending=True) # 对序列长度进行降序排序,返回排序后的长度和索引
sequences_sorted = padded_sequences[sorted_idx] # 使用排序后的索引对填充序列进行排序# 打包序列以处理变长序列
packed_input = pack_padded_sequence(sequences_sorted, # 按长度降序排序后的序列 形状(3,10,5)lengths_sorted.cpu(), # 按长度降序排序后的长度 [10,9,8],注意:如果以tensor形式提供,则必须在CPU上batch_first=True)'''
正常的input(批次大小, 序列长度, 输入特征维度)
打包后的input:是一个PackedSequence对象(注意:所有RNN模块都接受已打包序列作为输入)
PackedSequence对象包含两个主要属性:data:包含所有有效(非填充)元素的张量 形状(8+9+10,5)batch_sizes:每个时间步的有效序列数量 [3, 3, 3, 3, 3, 3, 3, 3, 2, 1] 三维横截面
'''# 前向传播
packed_output, (hn, cn) = lstm(packed_input) # 如果不给初始状态h0和c0,默认初始状态为0'''
正常的output(批次大小, 序列长度, 隐藏维度×方向数)
打包后的lstm前向传播输出的output:是一个PackedSequence对象
PackedSequence对象包含两个主要属性:data:包含所有有效(非填充)元素的张量 形状(27,64) 64是隐藏维度batch_sizes:每个时间步的有效序列数量 [3, 3, 3, 3, 3, 3, 3, 3, 2, 1] 三维思维但是无论打不打包,hn都是每个序列最后一个有效时间步的隐藏状态,形状为(层数×方向数, 批次大小, 隐藏维度)
'''# hn(层数×方向数, 批次大小, 隐藏维度)
print("单层单向LSTM - 方案一 (通过hidden取隐藏状态):")
print(f"hn shape: {hn.shape}") # (1*1,3,64)
print(f"取最后一层隐藏状态(还未恢复顺序): {hn[-1].shape}") # (3, 64)# 恢复原始顺序(根据排序后索引)
_, unsorted_indices = torch.sort(sorted_idx) # 降序# 取最后一层的隐藏状态,再根据原始索引恢复顺序
final_hidden = hn[-1][unsorted_indices]
print(f"恢复顺序后: {final_hidden.shape}")方案二:通过 output 取每个序列的最后一个有效输出
# 创建单层单向LSTM(同上)
lstm = nn.LSTM(input_size, hidden_size, num_layers=1, batch_first=True)# 排序和打包(同上)
lengths_sorted, sorted_idx = lengths.sort(descending=True)
sequences_sorted = padded_sequences[sorted_idx]
packed_input = pack_padded_sequence(sequences_sorted, lengths_sorted.cpu(), batch_first=True)# 前向传播(同上)
packed_output, (hn, cn) = lstm(packed_input) # 如果不给初始状态h0和c0,默认初始状态为0
'''
正常的output(批次大小, 序列长度, 隐藏维度×方向数)
打包后的lstm前向传播输出的output:是一个PackedSequence对象
PackedSequence对象包含两个主要属性:data:包含所有有效(非填充)元素的张量 形状(27,64) 64是隐藏维度batch_sizes:每个时间步的有效序列数量 [3, 3, 3, 3, 3, 3, 3, 3, 2, 1] 三维思维
'''
# 解包:返回填充后的输出张量output、每个序列的实际长度的张量output_lengths
output, output_lengths = pad_packed_sequence(packed_output, batch_first=True)print("单层单向LSTM - 方案二 (通过output取最后一个有效输出):")
print(f"解包后output shape: {output.shape}") # (3, 10, 64) output(批次大小, 序列长度, 隐藏维度×方向数)# 手动取每个序列的最后一个有效输出
last_outputs = []
for i, length in enumerate(output_lengths):last_outputs.append(output[i, length-1, :])# stack()函数将列表中的张量按指定维度拼接起来
last_outputs = torch.stack(last_outputs) # (批次大小, 隐藏维度×方向数)-> (3, 64)# 获取原始顺序(根据排序后索引)
_, unsorted_indices = torch.sort(sorted_idx)# 取最后一层的隐藏状态,再根据原始索引恢复顺序
final_output = last_outputs[unsorted_indices]
print(f"最后一个有效输出: {final_output.shape}") # (3, 64)# 验证两种方案结果相同
print(f"两种方案结果相同: {torch.allclose(final_hidden, final_output, atol=1e-6)}")附录:
0.torch.allclose()方法
torch.allclose(input, other, rtol=1e-05, atol=1e-08, equal_nan=False):用于判断两个张量是否在允许的误差范围内"足够接近"。
参数:
input: 第一个张量
other: 第二个张量
rtol: 相对容差 (relative tolerance),默认 1e-05
atol: 绝对容差 (absolute tolerance),默认 1e-08
equal_nan: 是否将 NaN 视为相等,默认 False
判断条件:
当满足以下条件时返回
True:|input - other| ≤ atol + rtol × |other|为什么不直接使用==进行判断呢?
import torch# 创建两个非常接近的张量 a = torch.tensor([1.0, 2.0, 3.000001]) b = torch.tensor([1.0, 2.0, 3.0])print("直接比较:", a == b) # tensor([True, True, False]) print("allclose比较:", torch.allclose(a, b)) # True print("差值:", a - b) # tensor([0.0000, 0.0000, 0.0000])
torch.allclose(output[-1], hn[-1])这行代码:
验证理论:确认单向单层LSTM中最后一个时间步的输出与最终隐藏状态相等
处理精度:避免浮点数计算中的微小精度误差导致验证失败
实用性强:是PyTorch中比较张量相等性的推荐方法
1.torch.sort()操作
torch.sort(input, dim=-1, descending=False, *, stable=False, out=None):按值对 input 张量沿给定维度进行升序排序。
如果未指定 `dim`,则选择 `input` 的最后一个维度。如果 descending 为 True,则按值降序排序。
如果 stable 为 True,则排序例程将变为稳定排序,保留等价元素的顺序。
参数:
input (Tensor) – 输入张量。
dim (int, optional) – 要沿其排序的维度
descending (bool, optional) – 控制排序顺序(升序或降序)
关键字参数:
stable (bool, optional) – 使排序例程稳定,保证等价元素的顺序得以保留。
out (tuple, optional) – 可选的输出元组 (Tensor, LongTensor),可用于作为输出缓冲区
返回:
一个 namedtuple,包含 (values, indices),其中 values 是排序后的值,indices 是原始 input 张量中元素的索引。
注意区分 numpy.argsort()和numpy.sort()!!!
示例:
>>> x = torch.randn(3, 4) # 3行4列的随机张量 >>> sorted, indices = torch.sort(x) # 默认按行排序(默认升序),返回排序后的张量和排序后的索引 >>> sorted tensor([[-0.2162, 0.0608, 0.6719, 2.3332],[-0.5793, 0.0061, 0.6058, 0.9497],[-0.5071, 0.3343, 0.9553, 1.0960]]) >>> indices tensor([[ 1, 0, 2, 3],[ 3, 1, 0, 2],[ 0, 3, 1, 2]])>>> sorted, indices = torch.sort(x, 0) # 按列排序(默认升序) >>> sorted tensor([[-0.5071, -0.2162, 0.6719, -0.5793],[ 0.0608, 0.0061, 0.9497, 0.3343],[ 0.6058, 0.9553, 1.0960, 2.3332]]) >>> indices tensor([[ 2, 0, 0, 1],[ 0, 1, 1, 2],[ 1, 2, 2, 0]])
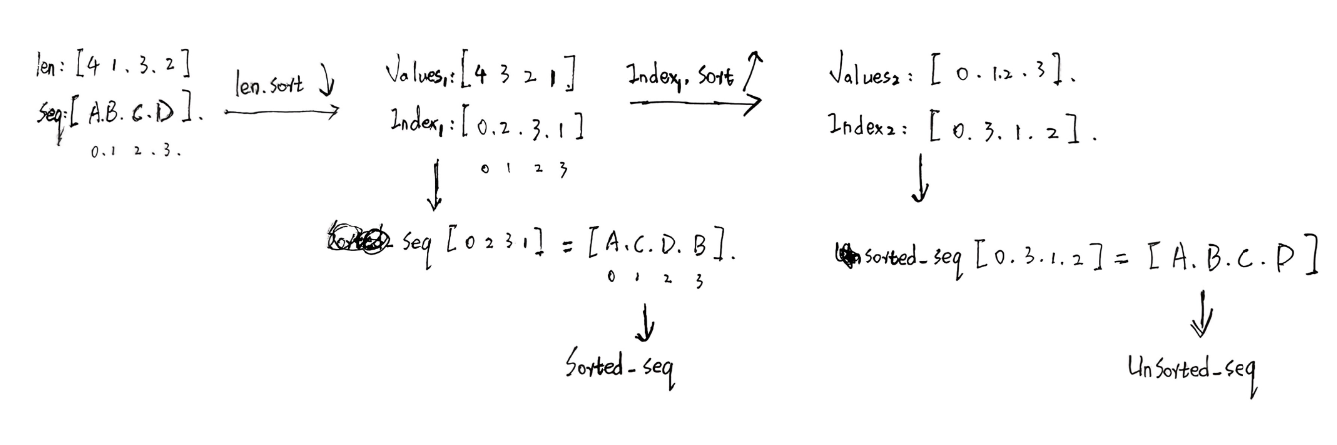
2.使用两次torch.sort()操作恢复原始序列
代码中使用了两次torch.sort(),第一次先对序列长度进行降序排序,返回排序后的长度和索引(实现了对原始序列的降序排序);
第二次又对排序后的索引进行了排序,返回了排序后索引的排序索引(又将排序后序列恢复为原始序列了)。这个过程到底是怎么实现的?分析如下图:
3.pack_padded_sequence()
pack_padded_sequence(input, lengths, batch_first=False, enforce_sorted=True):
input 的形状可以是 T x B x * (如果 batch_first 为 False) 或 B x T x * (如果 batch_first 为 True),其中 T 是最长序列的长度,B 是批次大小,而 * 是任意数量的维度(包括 0)。
对于未排序的序列,请使用 enforce_sorted = False。
如果 enforce_sorted 为 True,序列应该按长度递减排序,即 input[:,0] 应该是最长序列,input[:,B-1] 应该是最短序列。
enforce_sorted = True 仅对 ONNX 导出是必需的。
它是 pad_packed_sequence() 的逆向操作,因此可以使用 pad_packed_sequence() 来恢复 PackedSequence 中打包的底层张量。
参数:
input (Tensor) – 可变长度序列的填充批次。
lengths (Tensor 或 list(int)) – 每个批次元素的序列长度列表(如果以 tensor 形式提供,则必须在 CPU 上)。
batch_first (bool, optional) – 如果为 True,则输入格式为 B x T x *;否则为 T x B x *。默认为 False。
enforce_sorted (bool, optional) – 如果为 True,则输入应包含按长度递减排序的序列。如果为 False,则输入将无条件排序。默认为 True。
返回:
一个 PackedSequence 对象
4.PackedSequence对象分析
PackedSequence对象:存储已打包序列的数据和 batch_sizes 列表。所有 RNN 模块都接受已打包序列作为输入。
注意:此类的实例不应手动创建。它们应由 pack_padded_sequence() 等函数实例化。
Batch_sizes 表示批次中每个序列步的元素数量,而不是传递给 pack_padded_sequence() 的可变序列长度。例如,给定数据 abc 和 x,PackedSequence 将包含数据 axbc,其中 batch_sizes=[2,1,1]。
变量:
data (Tensor) – 包含所有有效(非填充)元素的张量
batch_sizes (Tensor) – 每个时间步的有效序列数量
sorted_indices (Tensor, optional) – 包含此 PackedSequence 如何从序列构建的整数张量。
unsorted_indices (Tensor, optional) – 包含如何恢复具有正确顺序的原始序列的整数张量。
返回类型:
自我PackedSequence
让我们从调试的视角一步一步分析打包后的效果:
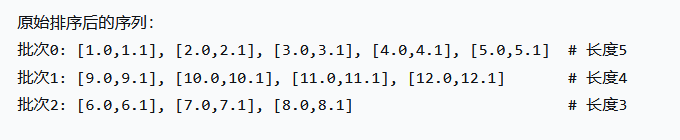
1.假设我们填充后的数据如下所示:
原始三维序列形状: torch.Size([3, 4, 2]) 原始序列: tensor([[[ 1., 10.],[ 2., 20.],[ 3., 30.],[ 4., 40.]],[[ 5., 50.],[ 6., 60.],[ 7., 70.],[ 0., 0.]],[[ 8., 80.],[ 9., 90.],[ 0., 0.],[ 0., 0.]]]) 序列长度: tensor([4, 3, 2])
2.排序(按序列长度降序)、并打包后的数据:
排序后序列: tensor([[[ 1., 10.],[ 2., 20.],[ 3., 30.],[ 4., 40.]],[[ 5., 50.],[ 6., 60.],[ 7., 70.],[ 0., 0.]],[[ 8., 80.],[ 9., 90.],[ 0., 0.],[ 0., 0.]]]) 排序后长度: tensor([4, 3, 2])=== PackedSequence对象分析 === packed_input.data: tensor([[ 1., 10.],[ 5., 50.],[ 8., 80.],[ 2., 20.],[ 6., 60.],[ 9., 90.],[ 3., 30.],[ 7., 70.],[ 4., 40.]]) packed_input.data形状: torch.Size([9, 2]) packed_input.batch_sizes: tensor([3, 3, 2, 1])
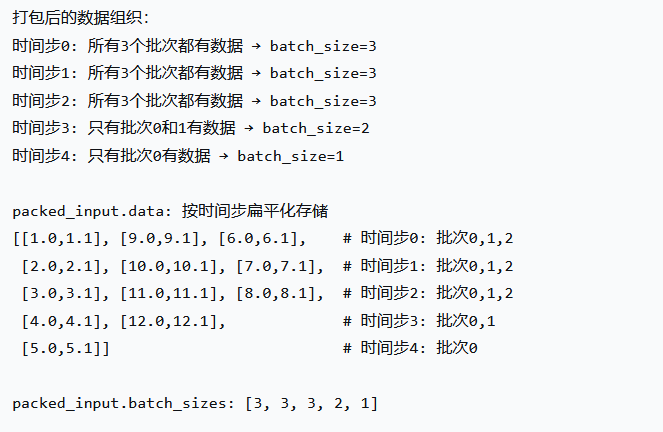
3. 逐步解析三维打包过程
时间步0 (t=0):
所有3个序列都有有效数据
数据: 序列1的[1,10], 序列2的[5,50], 序列3的[8,80]
batch_sizes[0] = 3
data中存储:[[1,10], [5,50], [8,80]]时间步1 (t=1):
所有3个序列都有有效数据
数据: 序列1的[2,20], 序列2的[6,60], 序列3的[9,90]
batch_sizes[1] = 3
data中存储:[[2,20], [6,60], [9,90]]时间步2 (t=2):
只有前2个序列有有效数据
数据: 序列1的[3,30], 序列2的[7,70] (序列3已结束)
batch_sizes[2] = 2
data中存储:[[3,30], [7,70]]时间步3 (t=3):
只有第1个序列有有效数据
数据: 序列1的[4,40] (其他序列已结束)
batch_sizes[3] = 1
data中存储:[[4,40]]
可视化打包过程:时间步: 0 1 2 3 序列1: [[1,10]] --> [[2,20]] --> [[3,30]] --> [[4,40]] 序列2: [[5,50]] --> [[6,60]] --> [[7,70]] --> (结束) 序列3: [[8,80]] --> [[9,90]] --> (结束) (结束)打包后的data: 时间步0: [[1,10], [5,50], [8,80]] (3个序列) 时间步1: [[2,20], [6,60], [9,90]] (3个序列) 时间步2: [[3,30], [7,70]] (2个序列) 时间步3: [[4,40]] (1个序列)batch_sizes: [3, 3, 2, 1]
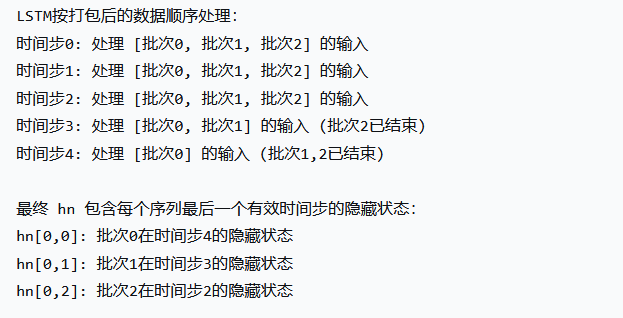
5.打包、前向传播、解包过程
原始序列数据: lens(5,3,4)

填充后的数据:(3,5,2)->(批次大小,序列长度,特征维度)

排序并打包:
# 按长度降序排序 lengths_sorted, sorted_idx = lengths.sort(descending=True) sequences_sorted = padded_sequences[sorted_idx] # 打包序列 packed_input = pack_padded_sequence(sequences_sorted, lengths_sorted.cpu(), # 需要CPU tensorbatch_first=True )
LSTM前向传播:
# 创建LSTM lstm = nn.LSTM(input_size, hidden_size, batch_first=True) # 前向传播 packed_output, (hn, cn) = lstm(packed_input)
packed_output, (hn, cn) = lstm(packed_input) # 前向传播
假如是 batch_size=True + 单层单向LSTM + 隐藏层维度为64,那么就有:
前向传播后的hn(层数×方向数, 批次大小, 隐藏维度) --> (1*1,3,64),hn表示:每个序列在最后一个有效时间步的隐藏状态。
-
形状:
(1, 3, 64)= (1层, 3个序列, 64维隐藏状态) -
内容:每个序列在最后一个有效时间步的隐藏状态
-
顺序:按排序后的批次顺序
[序列0, 序列2, 序列1](因为长度排序后是 [5,4,3])
hn (形状: 1×3×64): [[ [序列0在时间步4的隐藏状态], # 形状(64,)[序列2在时间步3的隐藏状态], # 形状(64,) [序列1在时间步2的隐藏状态] ] # 形状(64,) ]
正常的output(批次大小, 序列长度, 隐藏维度×方向数);打包后的lstm前向传播输出的packed_output:是一个PackedSequence对象,packed_output 的含义:
-
data: 所有时间步的所有有效输出的扁平化张量,形状(原始序列总长度,特征维度) -> (5+4+3,3) -
batch_sizes: 每个时间步有效的序列数量 -> [3, 3, 3, 2, 1]
解包过程:
output, output_lengths = pad_packed_sequence(packed_output, batch_first=True)
返回一个元组,包含:
填充后的输出张量output,形状为(batch_size, max_length, hidden_size) —> (3,5,64)
一个张量,包含每个序列的实际长度。 len [5,4,3]
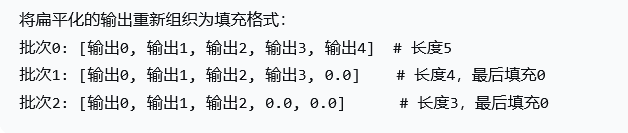
注意:解包后的序列顺序与打包前相同(即排序后的顺序,也就是[序列1, 序列3, 序列2])。我们需要用原始索引恢复顺序。
解包后的优势:
-
清晰的维度:
(batch_size, max_length, hidden_size) -
易于索引:
output[i, t, :]直接获取第i个序列在第t个时间步的输出 -
便于后续处理:可以直接用于其他神经网络层
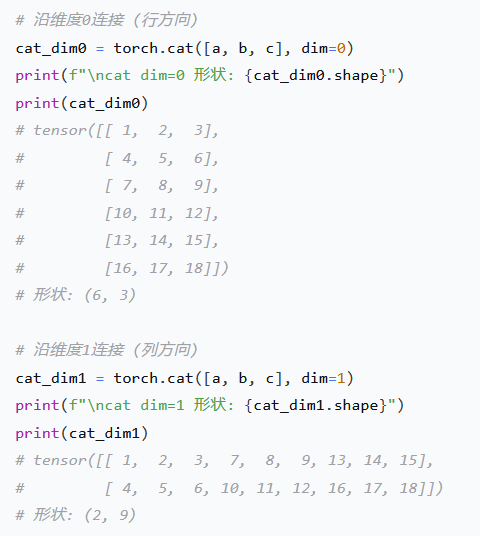
6.torch.stack() 与 torch.cat()的区别
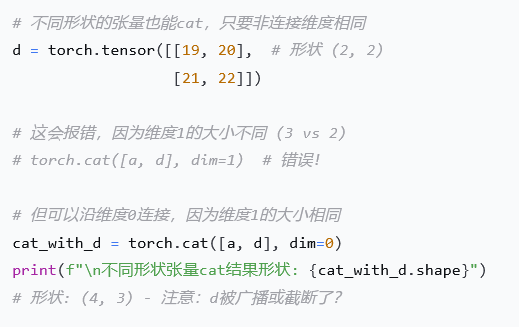
torch.cat()- 连接 (Concatenate)
作用: 在现有维度上连接张量
条件: 所有张量在非连接维度上必须形状相同
结果: 输出张量的维度数不变
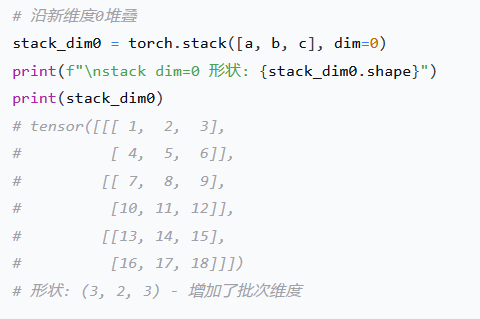
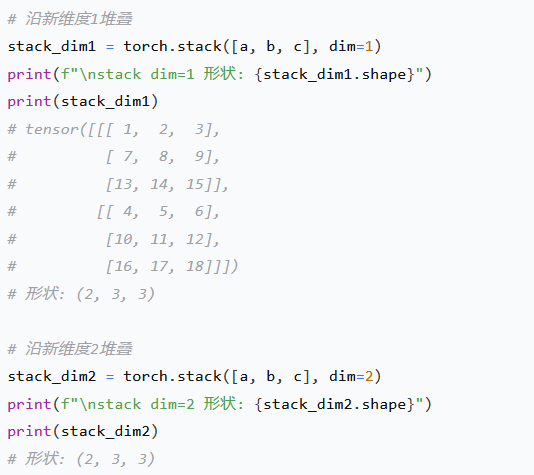
torch.stack()- 堆叠 (Stack)
作用: 创建新维度来堆叠张量
条件: 所有张量必须完全同形
结果: 输出张量的维度数增加1
1.示例数据准备
# 创建几个相同形状的张量 a = torch.tensor([[1, 2, 3],[4, 5, 6]])b = torch.tensor([[7, 8, 9],[10, 11, 12]])c = torch.tensor([[13, 14, 15],[16, 17, 18]])
2.torch.cat()用法详解
cat()的维度要求:
3.torch.stack()用法详解
stack()的严格形状要求: