【论文精读】FDGaussian:基于几何感知扩散模型的单图快速高斯溅射 3D 重建
标题:FDGaussian: Fast Gaussian Splatting from Single Image via Geometric-aware Diffusion Model
作者:Qijun Feng, Zhen Xing, Zuxuan Wu, Yu-Gang Jiang
单位:Fudan University, Shanghai, China(中国上海复旦大学)
发表:arXiv preprint arXiv:2403.10242v1 [cs.CV], 15 Mar 2024
论文链接:https://arxiv.org/pdf/2403.10242v1
项目代码:https://qjfeng.net/FDGaussian/
关键词:3D 重建(3D Reconstruction)、高斯溅射(Gaussian Splatting)、扩散模型(Diffusion Model)
在计算机视觉领域,单视图 3D 重建一直是极具挑战性的任务,其核心难点在于如何从单张 2D 图像中挖掘足够的 3D 几何信息,同时保证多视角一致性与重建效率。复旦大学团队提出的FDGaussian框架,创新性地结合几何感知扩散模型与加速高斯溅射技术,为这一难题提供了高效解决方案。
一、研究背景与挑战
单视图 3D 重建旨在从单张 RGB 图像中恢复物体的 3D 几何结构与外观,是虚拟现实(VR)、增强现实(AR)、机器人交互等领域的关键技术。然而,该任务面临三大核心挑战:
- 信息局限性:单张 2D 图像丢失了深度维度信息,导致 3D 几何推断存在歧义;
- 表示权衡难题:
- 显式表示(点云、体素、网格)直观且易变形,但难以呈现真实外观;
- 隐式表示(NeRF)可通过神经网络优化建模复杂结构,但渲染时需大量随机采样,耗时且易产生噪声;
- 多视角一致性与效率矛盾:现有基于 2D 扩散模型的方法(如 Zero-1-to-3)要么存在多视角不一致问题,要么无法高效处理复杂几何结构,且传统高斯溅射(Gaussian Splatting)优化中存在大量冗余操作,影响效率。
为解决上述问题,FDGaussian 提出两阶段框架:先通过几何感知扩散模型生成多视角一致的图像,再利用加速高斯溅射技术完成高质量 3D 重建。
二、相关工作回顾
在深入解读 FDGaussian 之前,需先了解 3D 重建领域的核心技术演进,这是 FDGaussian 创新的基础。
2.1 3D 重建表示方法对比
不同表示方法各有优劣,FDGaussian 的设计正是为了融合各类方法的优势,规避其缺陷:
| 表示类型 | 典型方法 | 优势 | 劣势 |
|---|---|---|---|
| 显式表示 | 点云(PointNet)、体素(VoxNet)、网格(Pixel2Mesh) | 直观易懂、支持变形、工业应用成熟 | 拓扑灵活性差、难以捕捉真实外观细节 |
| 隐式表示 | SDF/UDF、NeRF | 可建模任意拓扑结构、支持数据驱动学习 | 渲染需大量采样、计算成本高、难实时 |
| 混合表示 | 3D Gaussian Splatting | 结合神经网络优化与显式存储,兼顾质量与速度 | 传统方法忽略高斯间距,存在冗余分裂 / 克隆操作 |
2.2 基于 2D 扩散模型的 3D 重建
近年来,2D 扩散模型(如 Stable Diffusion)在图像生成领域取得突破,其强大的 3D 世界先验能力被用于辅助 3D 重建。现有工作可分为两类:
- 逐形状优化(如 DreamFusion):优化 3D 表示并利用 2D 扩散模型提供梯度指导,但存在优化时间长、“多脸问题”(同一物体不同视角出现多张脸)等缺陷;
- 单图生成多视角(如 Zero-1-to-3):无需训练数据即可生成新视角,但多视角一致性差、复杂几何结构建模能力弱。
FDGaussian 正是针对上述方法的不足,提出几何感知与加速优化策略。
三、FDGaussian 核心方法详解
FDGaussian 的两阶段框架(几何感知多视角生成 + 加速高斯重建)环环相扣,每一步都针对具体痛点设计创新模块。整体流程如图 2 所示:
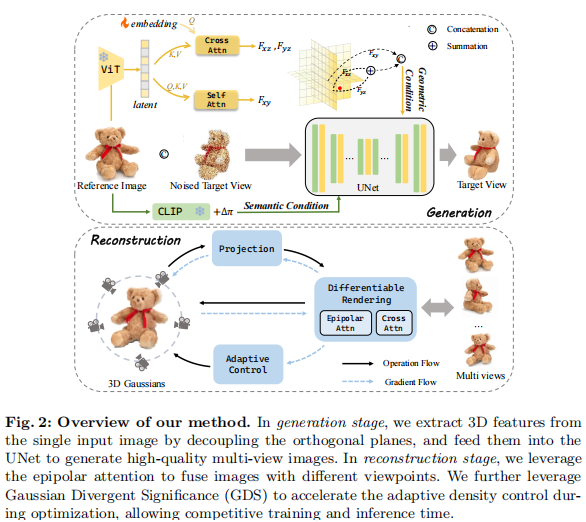
注:左侧为多视角生成阶段(提取几何与语义特征指导扩散模型),右侧为 3D 重建阶段(极线注意力融合多视角 + GDS 加速优化)。
3.1 阶段一:几何感知多视角图像生成
该阶段的目标是生成3D 感知、多视角一致、高保真的图像,核心创新在于 “正交平面分解” 与 “多条件融合”。
3.1.1 几何特征提取:正交平面分解
单张 2D 图像(xy 平面)无法直接提供 3D 信息,FDGaussian 通过正交平面解耦,从 xy 平面中分离出 yz、xz 平面的几何特征,具体步骤如下:
- 图像编码:使用视觉 Transformer(ViT)对输入图像编码,生成高维 latent 特征
,捕捉图像全局相关性;
- 平面解码:
- xy 平面特征(F_xy):通过自注意力解码器逆转编码过程,直接从
- yz/xz 平面特征(F_yz/F_xz):引入可学习嵌入(Learnable Embedding),通过交叉注意力将
h转换为正交平面特征,同时保证与 xy 平面的结构对齐;
- xy 平面特征(F_xy):通过自注意力解码器逆转编码过程,直接从
- 几何条件融合:将 F_xy、F_yz、F_xz 通过 “拼接 + 求和” 操作组合,形成最终的几何条件
C_geo,公式如下:C_geo = Concat(F_xy, F_yz, F_xz) + Sum(F_xy, F_yz, F_xz)
3.1.2 语义特征与扩散模型优化
为进一步保证生成图像的语义一致性,FDGaussian 引入CLIP 语义条件:
- 使用 CLIP 图像编码器编码输入参考图,CLIP 文本编码器编码视角变化 Δπ(如 “从上方 30 度观察物体”);
- 将两者嵌入拼接,形成语义条件
C_sem = Concat(CLIP_img, CLIP_text(Δπ))。
最终,扩散模型(基于 Stable Diffusion 改进)的输入为 “参考图 + 带噪目标视图 + 几何条件 + 语义条件”,优化目标为最小化去噪误差:,其中,
是 latent 空间带噪特征,
是 UNet 去噪网络,
是融合后的几何 - 语义条件。
3.2 阶段二:加速高斯溅射 3D 重建
传统高斯溅射(Gaussian Splatting)虽兼顾质量与速度,但存在两大问题:1)多视角信息融合不充分;2)优化中存在大量冗余的高斯分裂 / 克隆操作。FDGaussian 通过极线注意力与高斯发散显著性(GDS) 分别解决这两个问题。
3.2.1 高斯溅射基础回顾
3D 高斯溅射用大量 3D 高斯元表示场景,每个高斯元由以下参数定义:
- 位置
(均值);
- 3D 协方差矩阵
(通过缩放矩阵 S 与旋转矩阵 R 分解:
,保证半正定性);
- 颜色 c 与透明度
。
渲染时,先将 3D 高斯投影到 2D 图像平面,计算每个像素的高斯贡献,最终通过加权融合得到像素颜色:,其中 N 是覆盖该像素的高斯元集合。
3.2.2 极线注意力:多视角特征融合
传统方法仅用单图初始化高斯,或用普通交叉注意力融合多视角,无法利用视角间的几何约束。FDGaussian 提出极线注意力,基于极线几何缩小特征匹配范围:
- 极线几何原理:对于视角 s 中的特征点
,其在视角 t 中的对应点
必定落在一条固定直线(极线)上,该直线由两视角的相对姿态
决定(如图 4 所示)。
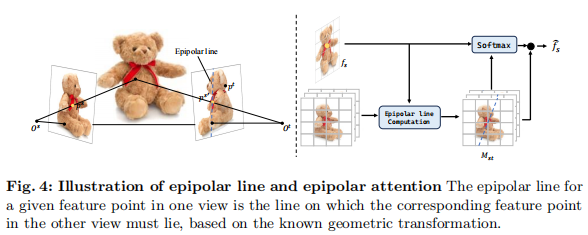
注:极线约束限定了跨视角特征匹配的范围,减少无效计算并提升准确性。
- 极线注意力计算:
- 对每个视角 s 的 UNet 中间特征
,计算其在所有其他视角 t 上的极线集合
;
- 生成极线权重矩阵
:仅保留极线附近像素的权重,其他位置权重设为 0;
- 加权融合多视角特征:
,得到融合后特征用于高斯参数预测。
- 对每个视角 s 的 UNet 中间特征
该机制不仅提升了多视角一致性,还减少了注意力计算量,兼顾准确性与效率。
3.2.3 高斯发散显著性(GDS):加速优化
传统高斯溅射的分裂 / 克隆操作忽略高斯间距,即使两个高斯元距离极近仍会执行操作,导致大量冗余计算。FDGaussian 提出GDS 指标,衡量高斯元间的 “发散程度”,仅对必要的高斯元执行优化操作:
-
GDS 定义:结合高斯元的位置差与协方差,量化两者的空间发散程度:
,其中
是高斯位置,
是协方差矩阵,
是矩阵迹。GDS 值越大,说明两个高斯元空间上越分散。
-
加速策略:
- 阈值筛选:仅对 “位置梯度> 阈值且 GDS > 阈值” 的高斯元执行分裂 / 克隆;
- k-NN 简化计算:通过 k 近邻算法找到每个高斯元的最近邻,仅计算这对高斯元的 GDS,将时间复杂度从
降至
(N 为高斯元数量);
- 协方差分解简化:利用
实验表明,GDS 可将优化时间缩短至原来的 1/15,且不损失重建质量。
3.3 损失函数设计
为保证重建图像的结构相似性与感知质量,FDGaussian 采用多损失融合:
:结构相似性损失,衡量重建图与真值的结构一致性;
:感知损失,基于预训练 CNN 提取特征,衡量主观视觉质量;
- 超参数设置:
,
(通过实验验证的最优值)。
四、实验验证与结果分析
FDGaussian 在Objaverse(800K CAD 模型)与GSO(高质量扫描家居物品)数据集上进行了全面验证,从定量、定性、消融实验三方面证明其优越性。
4.1 实验设置
- 硬件环境:NVIDIA V100(16GB)GPU;
- 基线方法:Zero-1-to-3、Realfusion、Consistent-123、Shap-E、DreamGaussian(覆盖隐式 / 显式 / 混合表示方法);
- 评价指标:
- 新视角合成(NVS):PSNR(峰值信噪比,越高越好)、SSIM(结构相似性,越高越好)、LPIPS(感知距离,越低越好);
- 3D 重建:Chamfer Distance(CD,点云相似度,越低越好)、CLIP 相似度(语义一致性,越高越好)、重建时间(越低越好)。
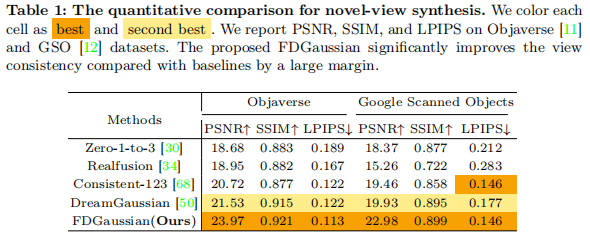
4.2 定量结果:全面超越基线
4.2.1 新视角合成性能
如表 1 所示,FDGaussian 在两个数据集上的 PSNR、SSIM、LPIPS 均优于所有基线,尤其在 Objaverse 上 PSNR 达到 23.97,比第二名 DreamGaussian 高 2.44,证明其多视角一致性与图像质量优势。
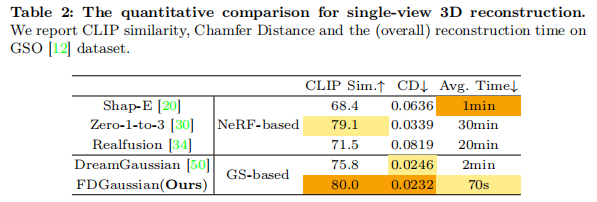
4.2.2 3D 重建性能
如表 2 所示,FDGaussian 在 CD(0.0232)与 CLIP 相似度(80.0)上最优,且重建时间仅 70 秒,远快于 Zero-1-to-3(30 分钟)与 DreamGaussian(2 分钟),实现 “质量与效率双优”。
4.3 定性结果:细节与一致性兼顾
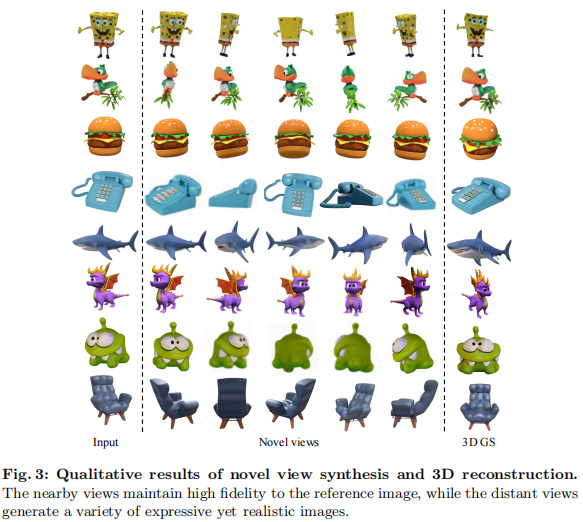
4.3.1 新视角合成
如图 3 所示,FDGaussian 生成的近视角与参考图高度一致(几何、语义无偏差),远视角则在保证合理性的同时展现多样性,避免了 “过度一致” 导致的僵硬感。
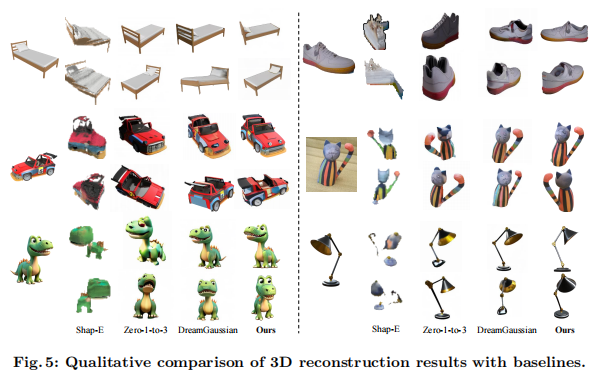
4.3.2 3D 重建对比
如图 5 所示,对比基线方法,FDGaussian 的优势显著:
- Shap-E:易出现几何坍缩,结果模糊;
- Zero-1-to-3:多视角不一致(如物体侧面细节错位);
- DreamGaussian:纹理过度平滑,丢失细节;
- FDGaussian:几何结构完整、纹理细节清晰、多视角完全一致。
4.4 消融实验:验证核心模块有效性
消融实验针对 FDGaussian 的三大核心模块(正交平面分解、CLIP 语义嵌入、极线注意力、GDS)展开,验证其必要性与贡献。
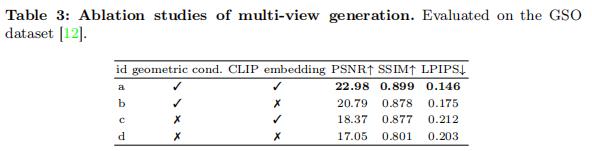
4.4.1 多视角生成模块消融
如表 3 所示,移除 “正交平面分解”(几何条件)后,PSNR 从 22.98 降至 18.37,LPIPS 从 0.146 升至 0.212,证明几何条件是保证多视角一致性的关键;移除 “CLIP 语义嵌入” 也会导致性能下降,说明语义约束可提升图像保真度。
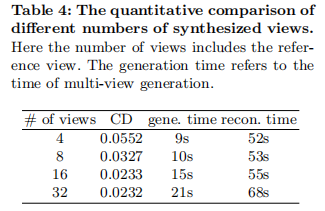
4.4.2 生成视角数量影响
如表 4 所示,随着生成视角数量从 4 增加到 16,CD 从 0.0552 降至 0.0233,重建质量显著提升;但视角数量增至 32 时,CD 仅降至 0.0232,时间却从 70 秒增至 89 秒(生成 21 秒 + 重建 68 秒),证明 16 个视角是 “质量 - 效率” 平衡点。
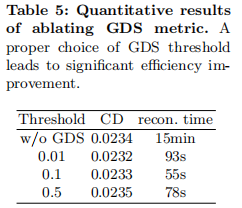
4.4.3 GDS 加速效果消融
如表 5 所示,不使用 GDS 时,重建时间长达 15 分钟;使用 GDS(阈值 0.1)后,时间缩短至 55 秒,且 CD 仅从 0.0234 升至 0.0233,几乎无质量损失,证明 GDS 的高效性。
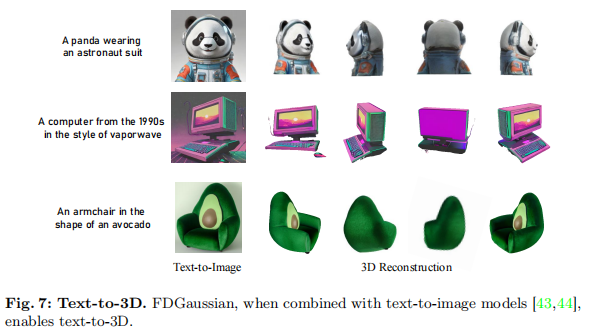
4.5 拓展能力:文本到 3D 生成
FDGaussian 可与文本到图像模型(如 DALL-E2、Stable Diffusion)无缝结合,实现 “文本→2D 图像→3D 重建” 的端到端流程。如图 7 所示,即使是 “穿宇航服的熊猫”“90 年代电脑(蒸汽波风格)” 等创意场景,FDGaussian 也能准确捕捉细节,甚至还原遮挡部分的几何结构。
五、局限性与未来展望
尽管 FDGaussian 表现出色,但仍存在以下局限:
- 固定视角数量:当前生成的视角数量固定(16 个),无法根据物体拓扑对称性自适应调整,可能导致冗余计算;
- 单物体重建限制:仅支持单个物体的 3D 重建,无法处理复杂场景(如室内环境)或多物体交互;
- 极端视角鲁棒性:对于极远距离或遮挡严重的视角,仍可能出现细节丢失。
未来研究方向可围绕以下几点展开:
- 设计自适应视角生成策略,根据物体形状动态调整视角数量与分布;
- 扩展框架至场景级 3D 重建,引入场景分割与深度估计模块,处理多物体与背景;
- 增强极端视角建模能力,结合深度先验或物理引擎,提升重建鲁棒性。
六、总结
FDGaussian 通过 “几何感知扩散模型 + 加速高斯溅射” 的两阶段框架,突破了单视图 3D 重建的核心瓶颈:
- 创新点 1:正交平面分解与多条件融合,解决多视角一致性问题;
- 创新点 2:极线注意力,高效利用多视角几何约束,提升特征融合质量;
- 创新点 3:高斯发散显著性(GDS),大幅减少冗余计算,兼顾质量与效率。
实验证明,FDGaussian 在定量指标与定性效果上全面超越现有方法,且支持文本到 3D 的拓展应用,为单视图 3D 重建的工业化落地提供了参考。