图像处理~多尺度边缘检测算法
差量算子(Difference Operator)
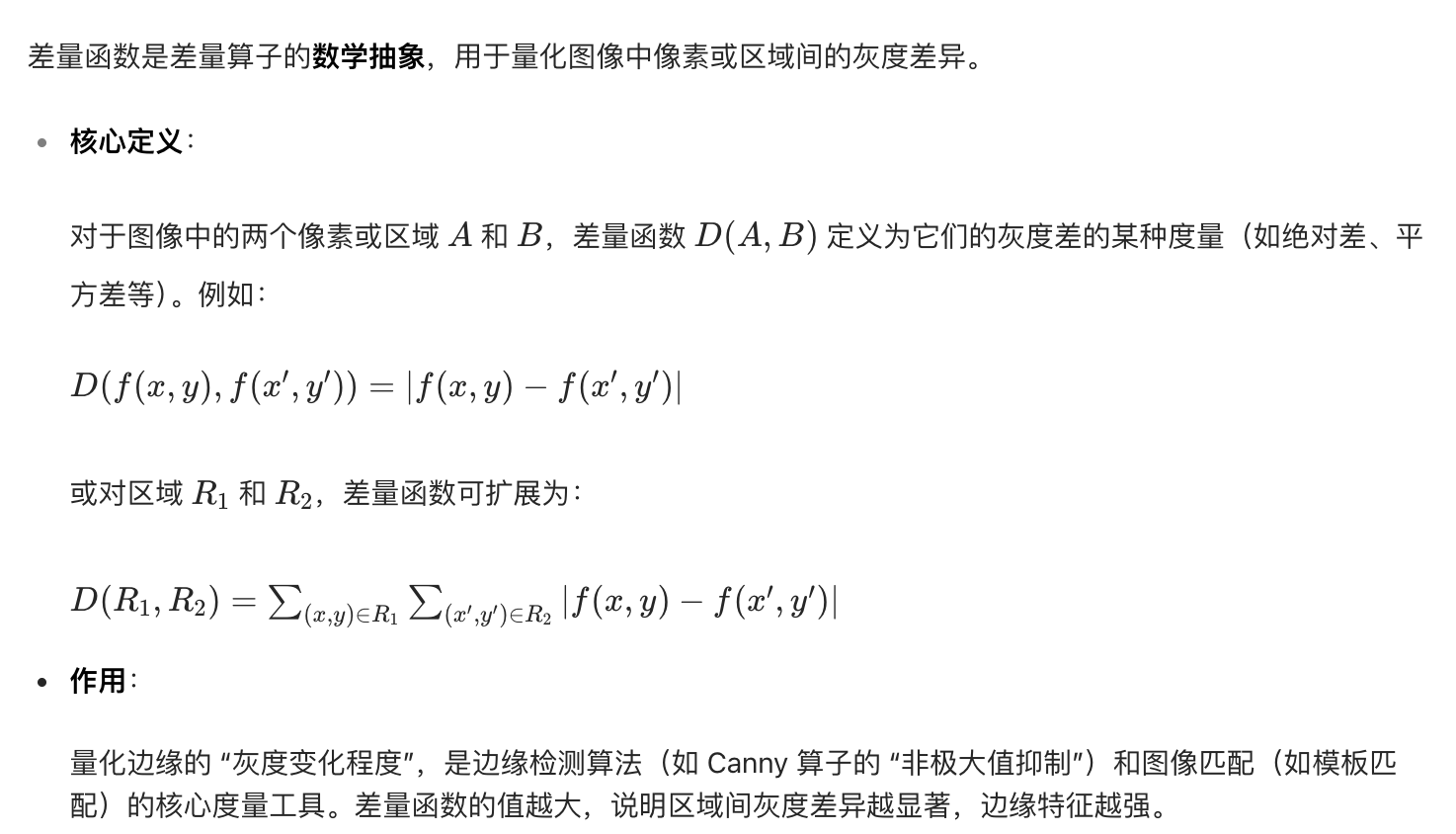
差量算子是边缘检测的基础工具,通过计算像素间的灰度差来识别图像中的边缘(灰度变化剧烈的区域)
核心定义:差量算子是一个 “模板”(如 Roberts、Sobel 算子),通过对图像像素进行局部差分运算,输出像素的灰度变化强度。例如:
一阶差分算子 - Roberts 算子
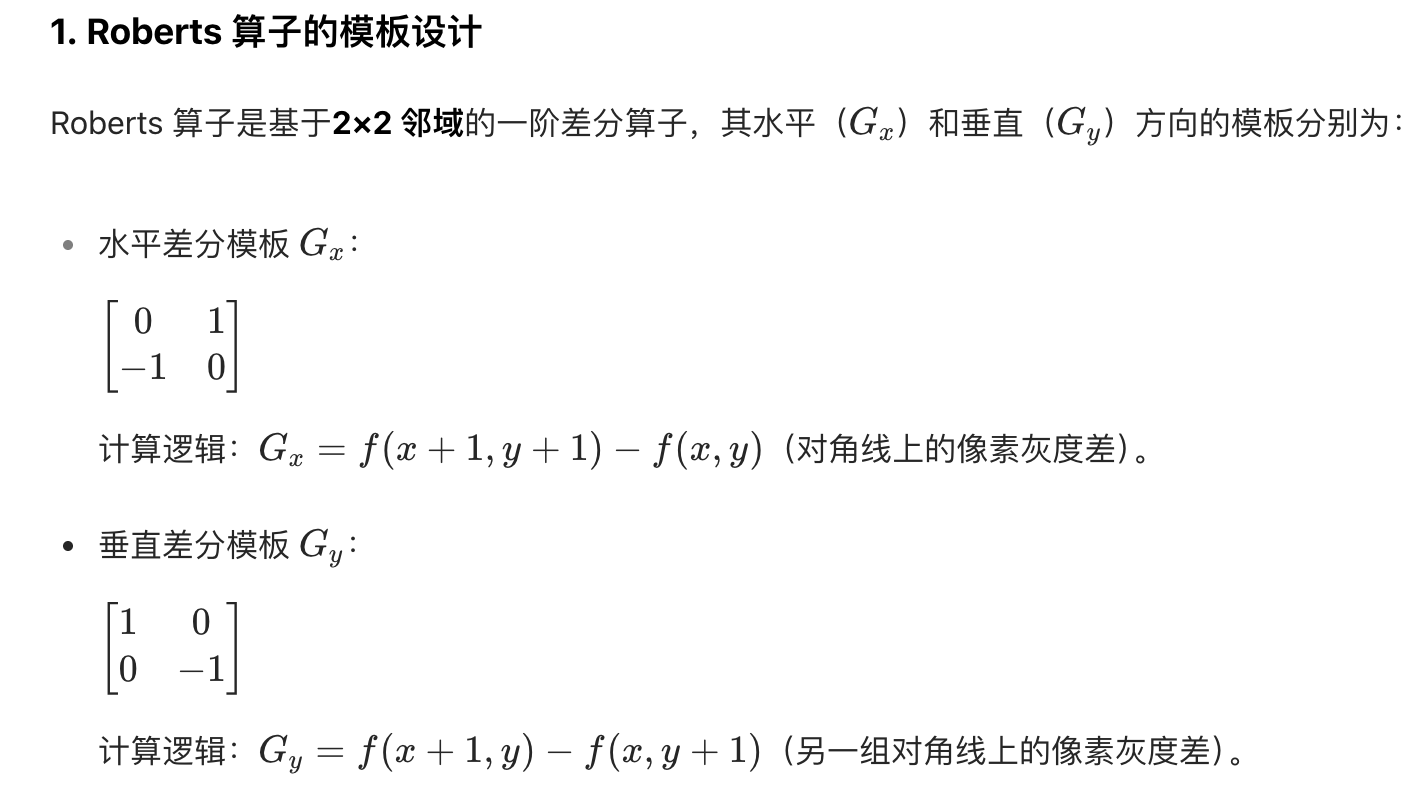
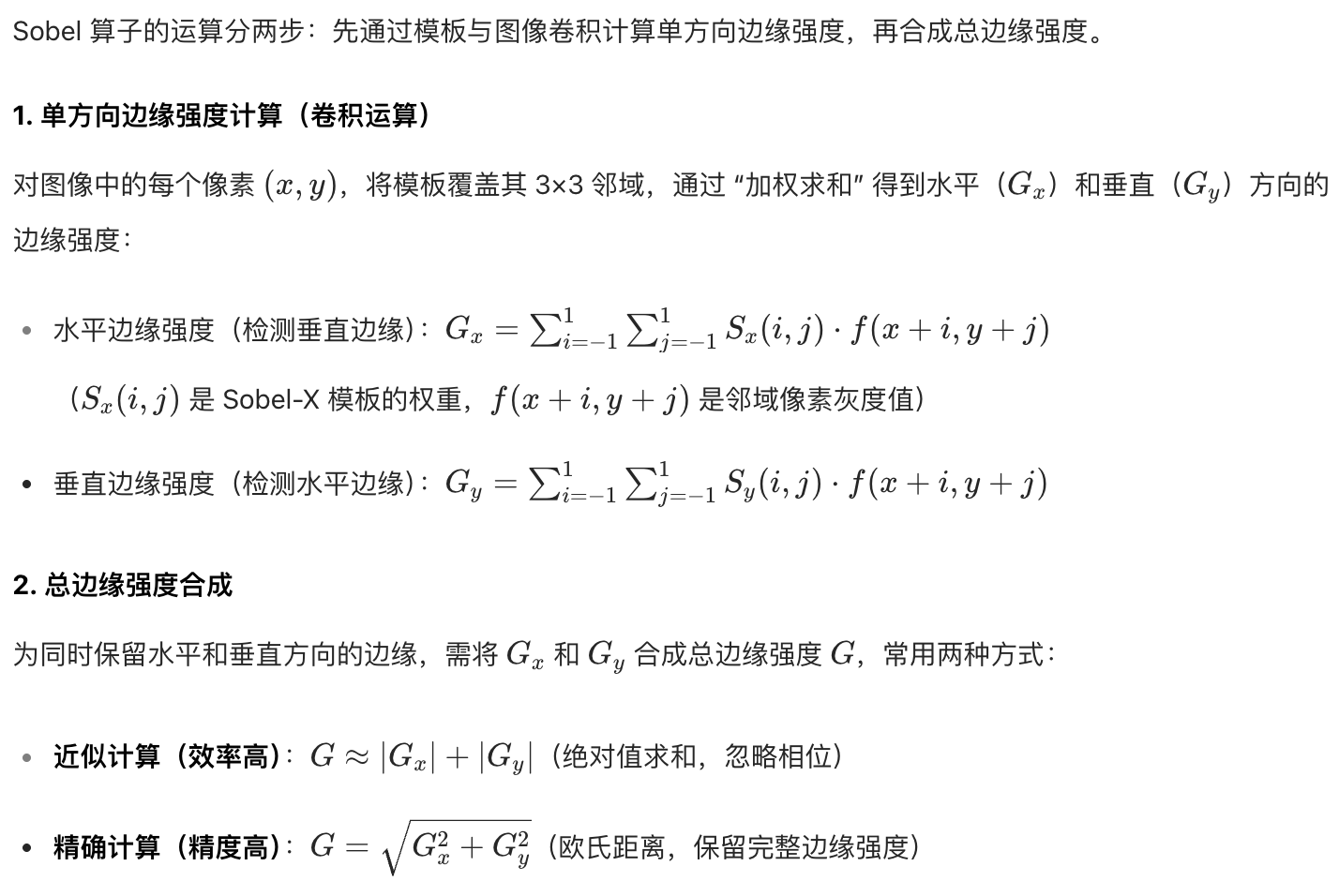
最终边缘强度的计算公式
差分模板是实现差分计算的 “工具载体”,计算逻辑是模板的 “运算规则”,二者是 “形式” 与 “内涵” 的关系
模板通过特定的计算逻辑,完成对图像像素的差分运算,从而提取边缘、纹理等特征。
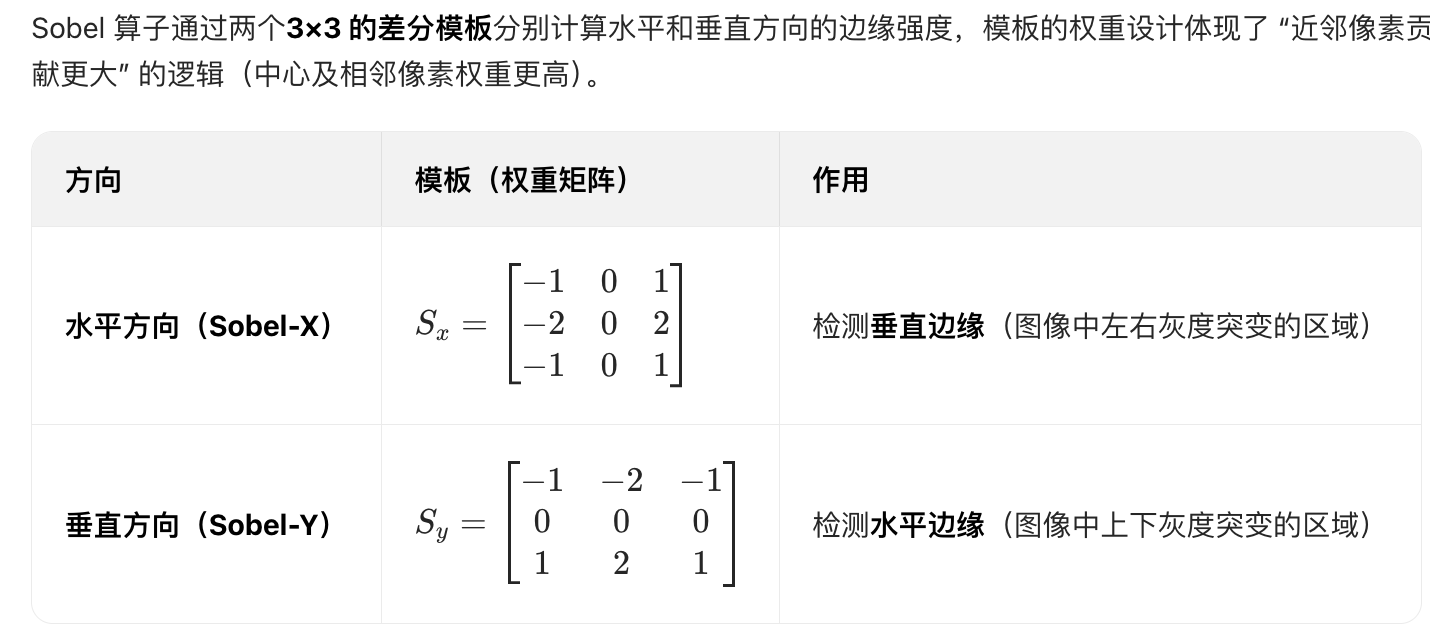
一阶差分算子 - Sobel 算子
Sobel 的标准发音是 /ˈsoʊbəl/(美式音标),中文可简单读作 “索贝尔”
Sobel 算子是图像处理中经典的一阶微分边缘检测算子
核心优势:提取边缘的同时通过 “加权平均” 抑制噪声,对水平和垂直方向的边缘检测效果突出,广泛用于图像边缘提取、特征识别等场景
它通过计算图像灰度值的 “一阶导数”(即灰度变化率)来检测边缘
它通过 3×3 邻域的加权差分,既保留一阶差分 “捕捉灰度变化率” 的核心能力,又通过加权平均抑制噪声
因此比 2×2 一阶差分算子(如 Roberts)应用更广泛
sobel算子的运算:
抗噪声能力强:3×3 邻域的 “加权平均”(中心像素权重为 2,相邻像素为 1)能平滑局部噪声,避免噪声被误判为边缘
边缘定位较准:一阶微分特性能有效捕捉灰度突变的位置,且加权设计让边缘响应更集中,不易出现边缘 “弥散”
方向针对性强:Sobel-X 和 Sobel-Y 模板分别对垂直、水平边缘敏感,可按需单独提取某一方向的边缘
示例:
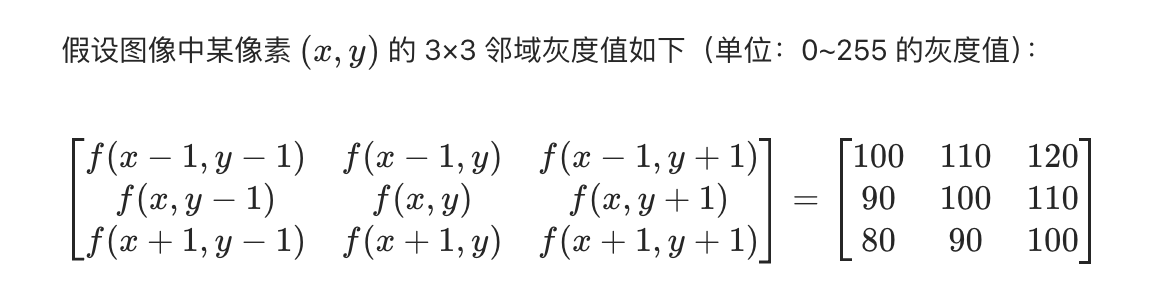
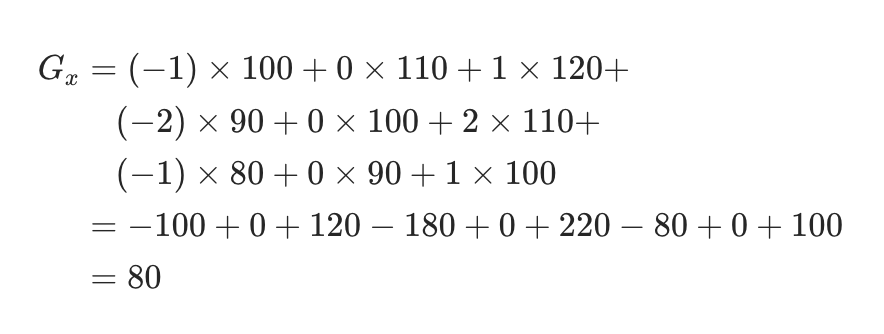
个人理解:相当于 120 - 100,2 * (110 - 90) 、100 - 80,中心及相邻像素权重更高(从左往右权重分别是1、2、1),抑制局部噪声
一阶差分算子和二阶差分算子对比

差量函数 - Difference Function
多尺度边缘检测算法
核心是在不同 “尺度”(如不同大小的滤波核、不同分辨率的图像)下提取边缘,以解决单一尺度下边缘检测的局限性
(如小尺度易受噪声干扰、大尺度易丢失细节)
通过构建尺度空间(如高斯金字塔、小波变换的多尺度分解),在多个尺度上分别检测边缘,再综合各尺度的边缘响应
例如:
高斯-拉普拉斯(LoG)多尺度检测:先对图像做不同尺度高斯模糊,再用拉普拉斯算子检测边缘,小尺度捕捉细边缘,大尺度捕捉粗边缘
小波变换多尺度检测:通过小波分解将图像分为高频(细节)和低频(概貌)子带,在不同子带(对应不同尺度)中提取边缘
优势:
能同时保留细边缘(如纹理、小物体轮廓)和粗边缘(如大物体轮廓、场景结构),避免单一尺度下 “要么噪点多、要么细节丢” 的问题
应用:高精度图像分析(如医学图像的多组织边缘提取)、场景理解(如自动驾驶中同时识别车道线细边缘和车辆粗轮廓)
多尺度边缘融合算法
在多尺度边缘检测的基础上,将不同尺度的边缘信息整合为统一的边缘图,解决多尺度边缘 “如何取舍、如何互补” 的问题
通过 “权重分配” 或 “特征投票” 的方式,融合各尺度的边缘响应。常见策略包括:
- 基于置信度的融合:给不同尺度的边缘响应赋予 “置信权重”(如小尺度边缘易受噪声影响,权重低;大尺度边缘更稳定,权重高),再加权求和得到最终边缘。
- 基于梯度的融合:计算各尺度边缘的梯度幅值和方向,选择 “梯度最显著、方向最一致” 的边缘作为最终边缘。
- 基于学习的融合:用深度学习模型(如 U-Net、EdgeCNN)直接学习 “多尺度边缘到融合边缘” 的映射关系,端到端输出最优边缘图
优势:输出的边缘图既包含细粒度细节,又具备全局一致性,解决了多尺度边缘 “碎片化、冗余化” 的问题
应用:图像增强(如老照片修复中的边缘补全)、目标识别(如同时识别小零件的细边缘和大设备的粗边缘,提升识别精度)
多尺度边缘检测和融合的关联与区别
对比维度 多尺度边缘检测算法 多尺度边缘融合算法
核心任务 从不同尺度 “提取” 边缘 将多尺度边缘 “整合” 为统一边缘图
技术逻辑 尺度空间构建 + 单尺度边缘检测 多尺度边缘评估 + 权重/投票融合
输出形式 多个尺度的边缘图(如小尺度边缘图、大尺度边缘图) 单一的融合边缘图
典型工具链 LoG 金字塔、小波分解 置信度加权、梯度投票、深度学习模型
以城市街景图像的边缘分析为例:
- 多尺度边缘检测:
小尺度提取 “交通标志的细边缘、行人轮廓的细节”,大尺度提取 “建筑轮廓、道路结构的粗边缘”,得到多个尺度的边缘图 - 多尺度边缘融合:
给小尺度边缘(易受噪声干扰)分配低权重,大尺度边缘(更稳定)分配高权重,再融合出 “既清晰又完整” 的街景边缘图,用于后续的道路分割、目标追踪等任务
多尺度边缘检测是 “分解问题”—— 在不同尺度下分别提取边缘
多尺度边缘融合是 “解决问题”—— 将分解的边缘信息整合为更优的结果
附录
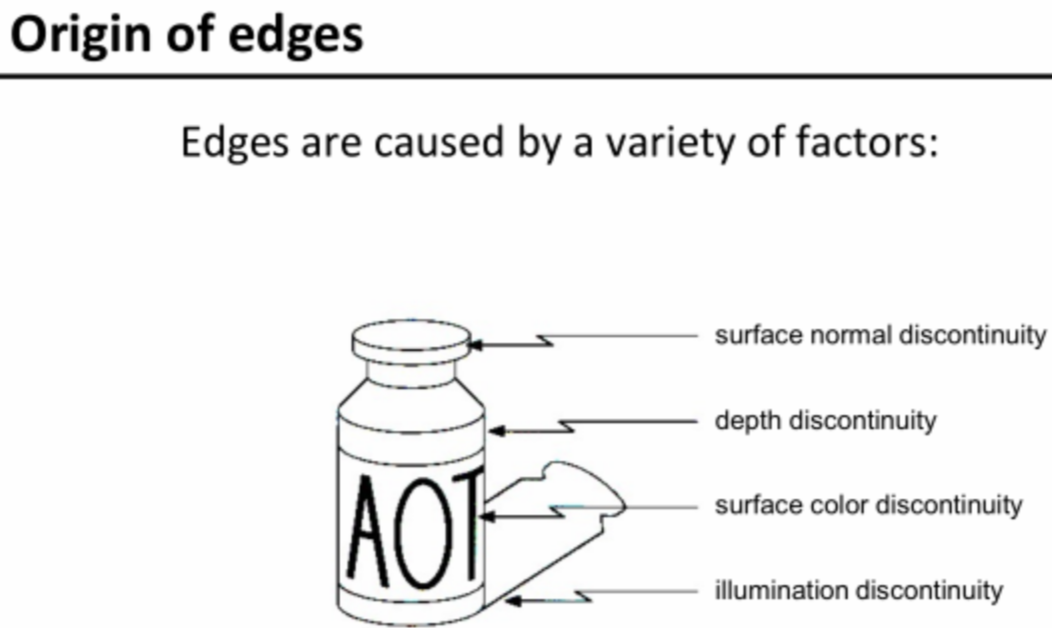
边缘的成因
- Surface Normal Discontinuity(表面不连续)
指物体表面的朝向突然改变。如图中药瓶的 “瓶盖顶部” 和 “瓶身侧面” 朝向不同,一个向上、一个向外,这种表面方向的突变会在图像中形成边缘。 - Depth Discontinuity(深度不连续)
指物体在空间深度上的突变。例如药瓶的边缘是 “前景药瓶” 和 “背景空间” 的分界,深度从药瓶的 “近” 突然变为背景的 “远”,这种深度跳变会在图像中产生边缘。 - Surface Color Discontinuity(表面颜色不连续)
指物体表面颜色或灰度的突然变化。图中药瓶上的 “AOT” 文字与瓶身颜色不同,这种颜色差异会在图像中形成明显的边缘。 - Illumination Discontinuity(光照不连续)
指光照条件的突变(如阴影、高光的边界)。例如药瓶表面的阴影边缘,或光线照射导致的明暗突变,这些光照变化会在图像中产生边缘。
discontinuity ˌdɪsˌkɒntɪˈnjuːəti 不连续;中断;间断性;断绝
illumination ɪˌluːmɪˈneɪʃn 光亮,照明;启迪,阐明;<英>彩灯,灯饰;(旧时书上通常用手工绘制的)彩饰,彩图
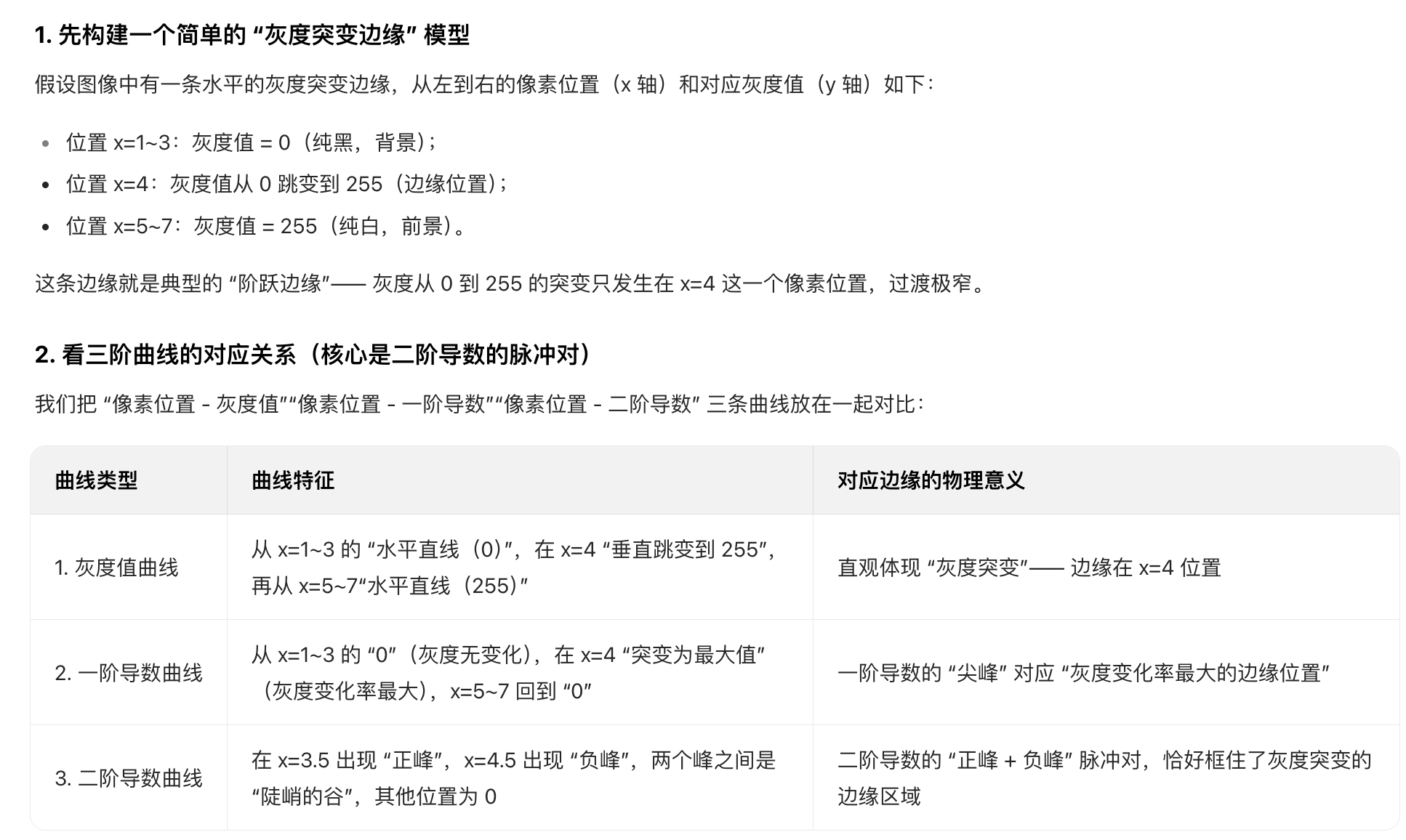
灰度突变的边缘(Step Edge)
灰度突变的边缘又称 “阶跃边缘”,是最典型的边缘类型
核心特征:边缘两侧的灰度值在极短距离内发生剧烈跳变,从一个稳定灰度值 “瞬间” 过渡到另一个稳定灰度值
视觉表现:边缘轮廓清晰、锐利,过渡区域极窄(通常只有 1-2 个像素宽度)
示例效果:黑白文字的边缘(黑色字体到白色背景的跳变)、纯色物体与背景的边界(如红色苹果放在白色桌面上的边缘)
数学特性:
从灰度变化率(一阶导数)来看,突变边缘的一阶导数在边缘位置会出现尖锐的峰值(对应 “瞬间跳变”)
从二阶导数来看,会出现 “正峰 + 负峰” 的脉冲对(对应 “跳变的起始和结束”)
检测适配:
适合用二阶差分算子(如 Laplace 算子)检测,因为二阶导数对 “突变” 的响应更敏感
一阶算子(如 Sobel)也能检测,但对 “突变” 的定位精度略逊于二阶算子
示例:
灰度渐变的边缘(Ramp Edge)
灰度渐变的边缘又称 “斜坡边缘”,核心特征是边缘两侧的灰度值不是瞬间跳变,而是通过一个 “过渡区域” 缓慢变化,从一侧灰度值逐渐过渡到另一侧灰度值。
视觉表现:边缘轮廓柔和、模糊,过渡区域有明显的宽度(通常超过 2 个像素)。
示例:阳光下物体的阴影边缘(从亮到暗有渐变过渡带)、渐变色背景的边界(如从浅蓝色到深蓝色的渐变区域)、低分辨率图像中的边缘(像素模糊导致过渡变宽)。
数学特性:从灰度变化率来看,渐变边缘的一阶导数在 “过渡区域” 会形成一个平缓的波峰(对应 “缓慢变化”),波峰宽度与过渡区域宽度一致;二阶导数则会出现 “负峰 + 正峰” 的平缓波形(对应 “变化率的上升和下降”)。
检测适配:适合用一阶差分算子(如 Sobel、Prewitt 算子)检测,因为一阶算子对 “变化率” 的捕捉更稳定,能有效提取渐变区域的整体边缘;二阶算子对渐变边缘的响应较弱,易因过渡平缓导致边缘 “断裂”。
高斯金字塔
一种多尺度图像表示方法,通过对图像进行高斯平滑(模糊)和下采样,生成一系列分辨率逐渐降低的图像层级,形成 “金字塔” 结构
(底层为高分辨率原图,顶层为低分辨率概貌)
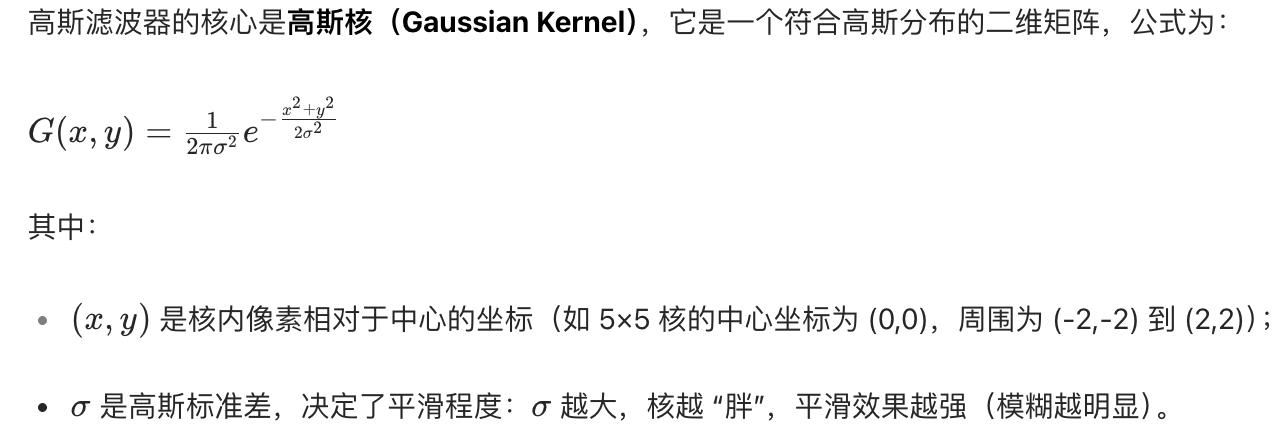
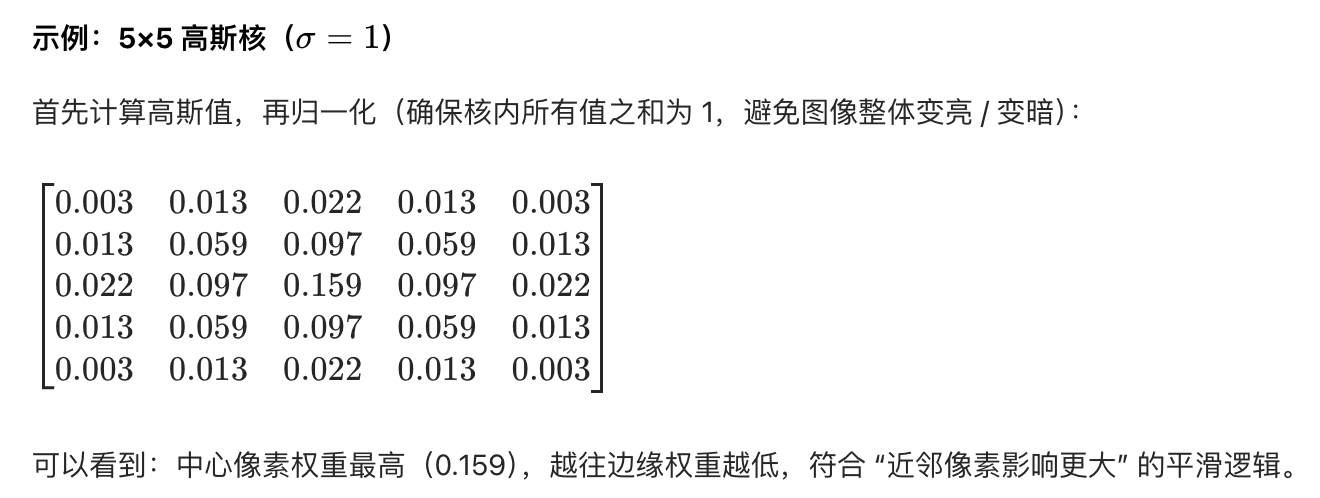
步骤 1:高斯平滑
对图像应用高斯滤波器(如 5×5 高斯核),抑制高频噪声和细节,使图像更平滑
步骤 2:下采样
对平滑后的图像每隔一个像素采样一次(删除偶数行和列),图像尺寸减半
重复上述两步,即可生成多层高斯金字塔
核心特性
多尺度覆盖:不同层级对应不同尺度的图像特征(高层捕捉大结构,低层保留细节)
抗混叠性:高斯平滑先于下采样,避免了直接降采样导致的 “锯齿” 或 “伪影”
典型应用
多尺度特征提取:如 SIFT 算法通过高斯金字塔检测不同大小的物体特征
图像压缩与融合:仅存储低分辨率层和差分信息,实现高效压缩;或在不同层级融合图像,实现无缝拼接
小波变换的多尺度分解
小波变换的多尺度分解是将信号(或图像)分解为不同尺度的频带分量,通过 “伸缩 - 平移” 的小波基函数,同时在时域和频域实现局部化分析,克服傅里叶变换 “全局化” 的缺陷
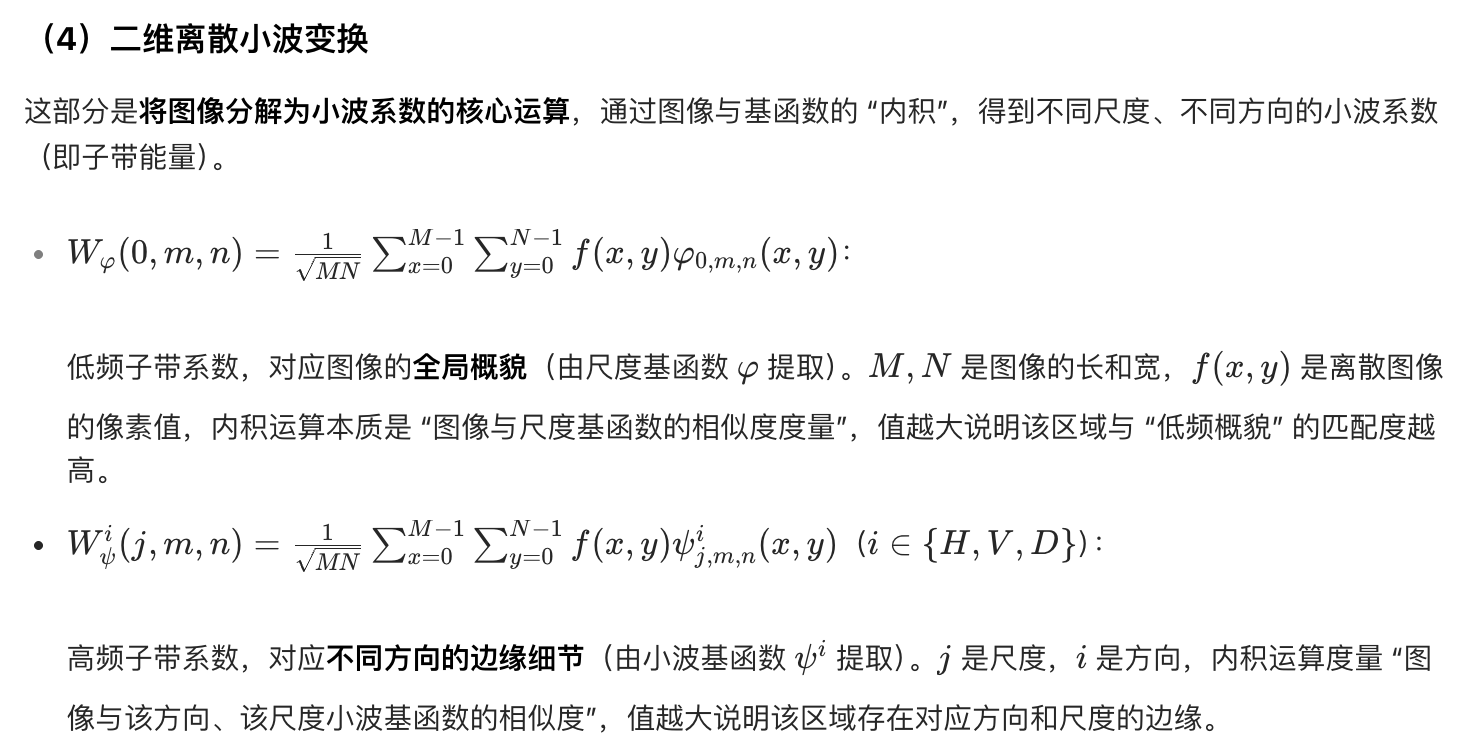
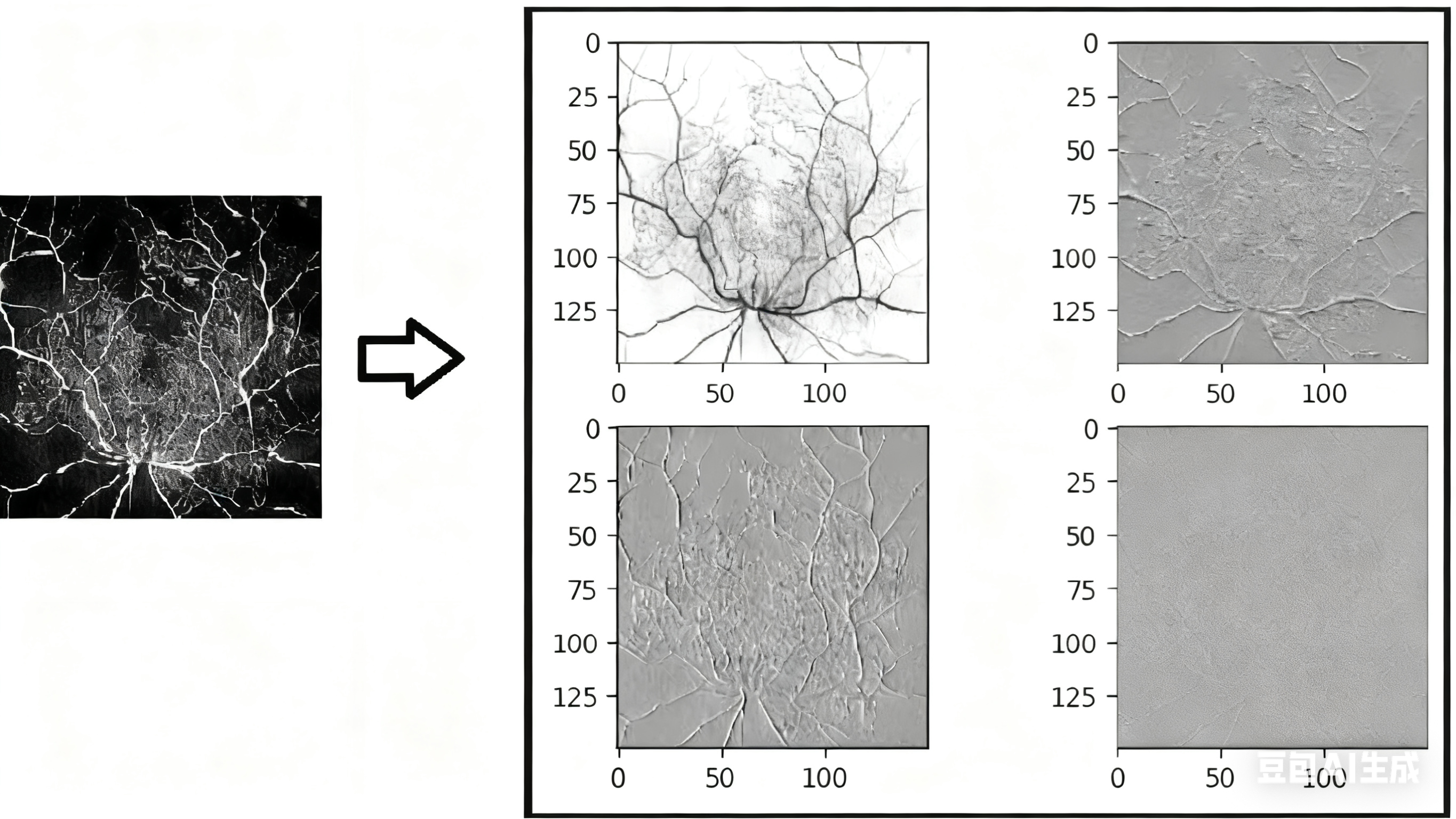
二维离散小波变换(DWT)原理
对图像进行多尺度分解时,每一层会将图像分为 4 个子带:
LL 子带:低频分量(图像的概貌,分辨率降低)
LH 子带:水平高频分量(垂直边缘信息)
HL 子带:垂直高频分量(水平边缘信息)
HH 子带:对角高频分量(斜向边缘和细节)
对 LL 子带重复上述分解,可得到多层小波金字塔
效果
核心特性
时频局部化:小尺度(高频)对应时域的精细细节,大尺度(低频)对应时域的全局结构
稀疏表示:自然图像的小波系数多集中在低频和少量高频,适合压缩和降噪
典型应用
图像压缩:如 JPEG2000 标准基于小波变换,通过量化和编码高频子带实现高效压缩
多尺度边缘检测:不同子带对应不同方向和尺度的边缘,可用于纹理分析、目标识别
高斯金字塔和小波变换的多尺度分解的区别

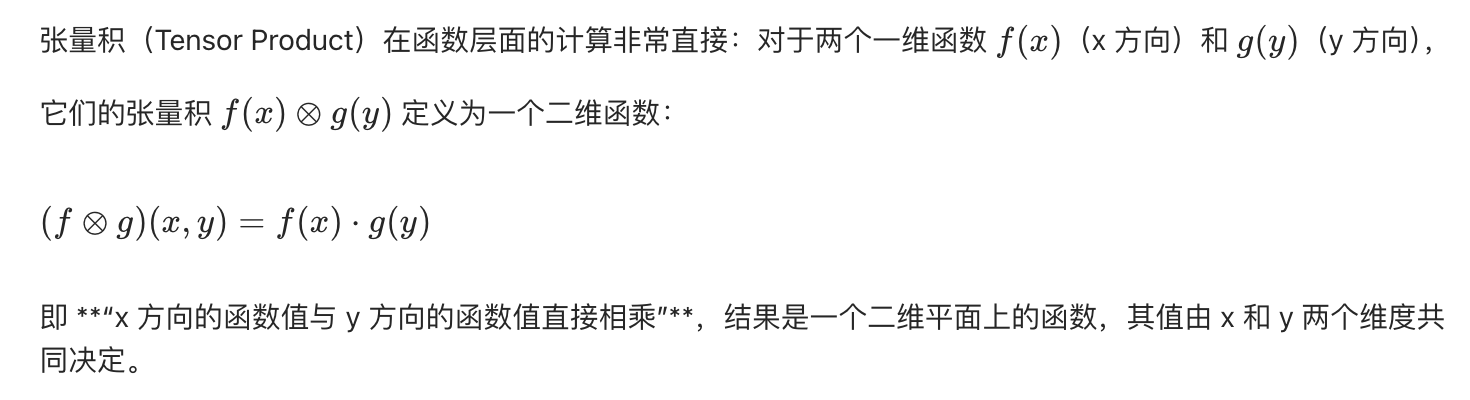
张量积 - Tensor Product
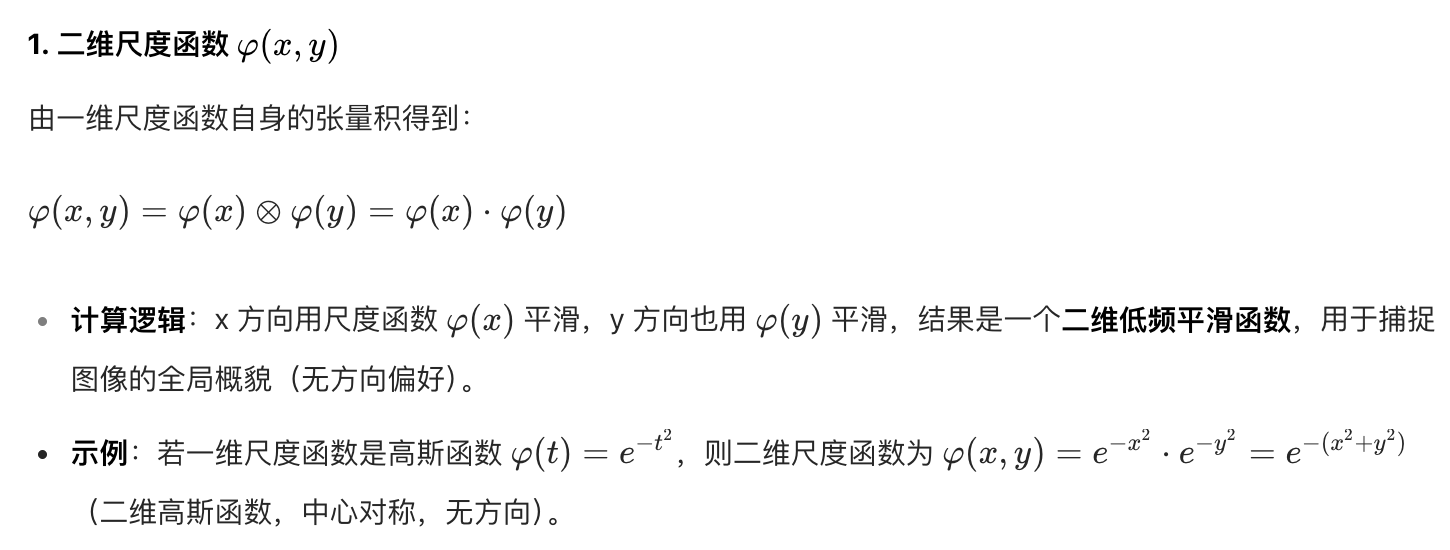
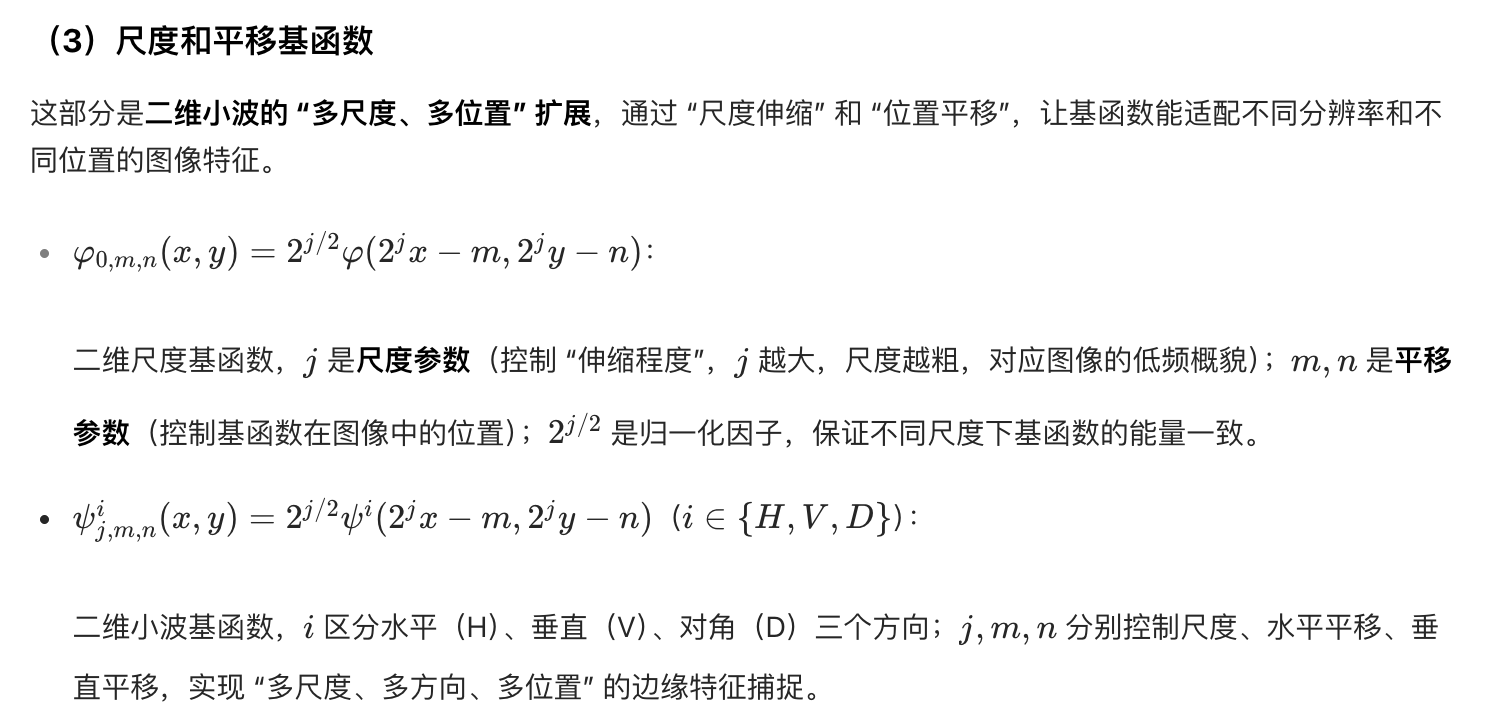
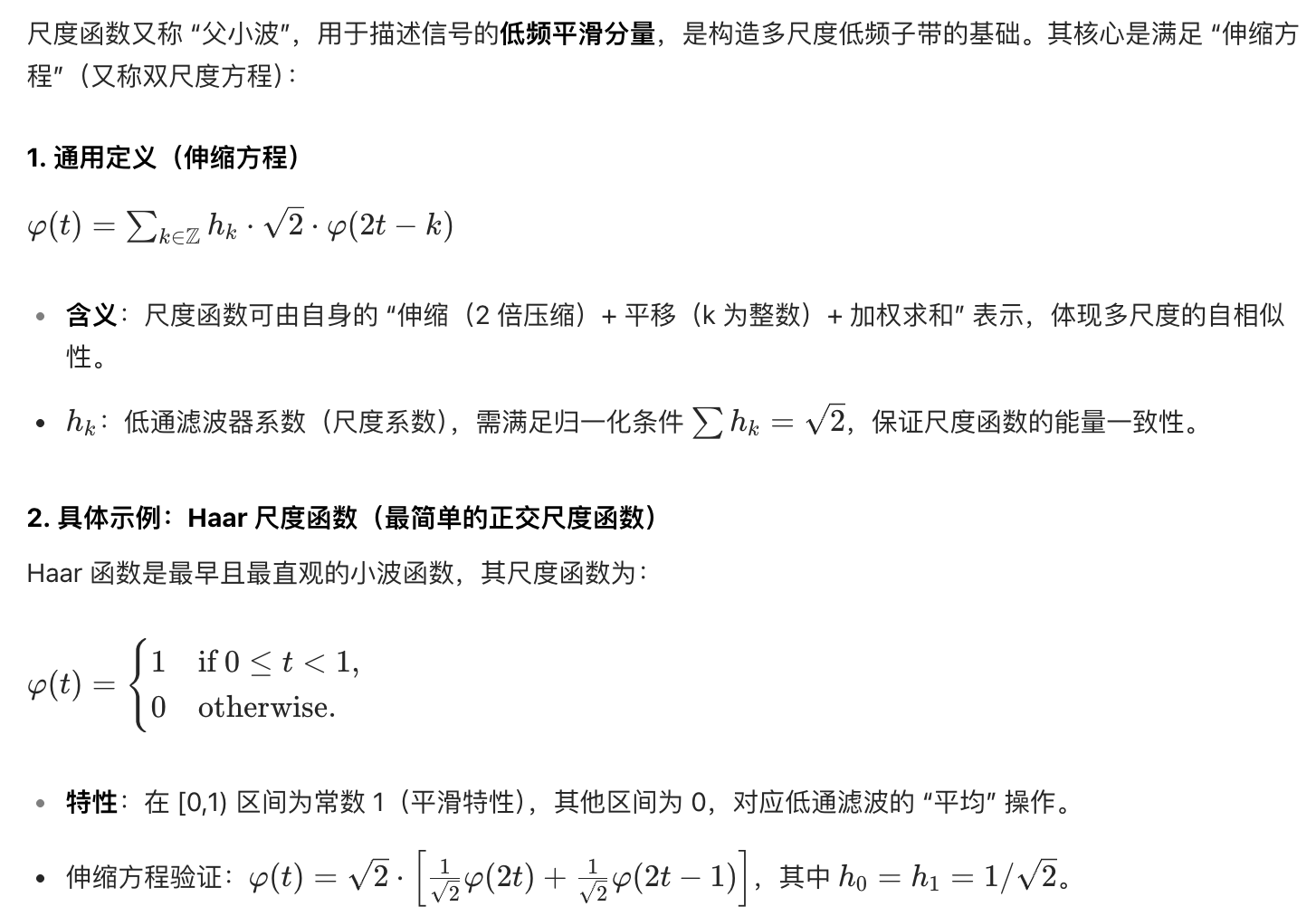
一维尺度函数(Scaling Function)
一维小波函数(Wavelet Function)
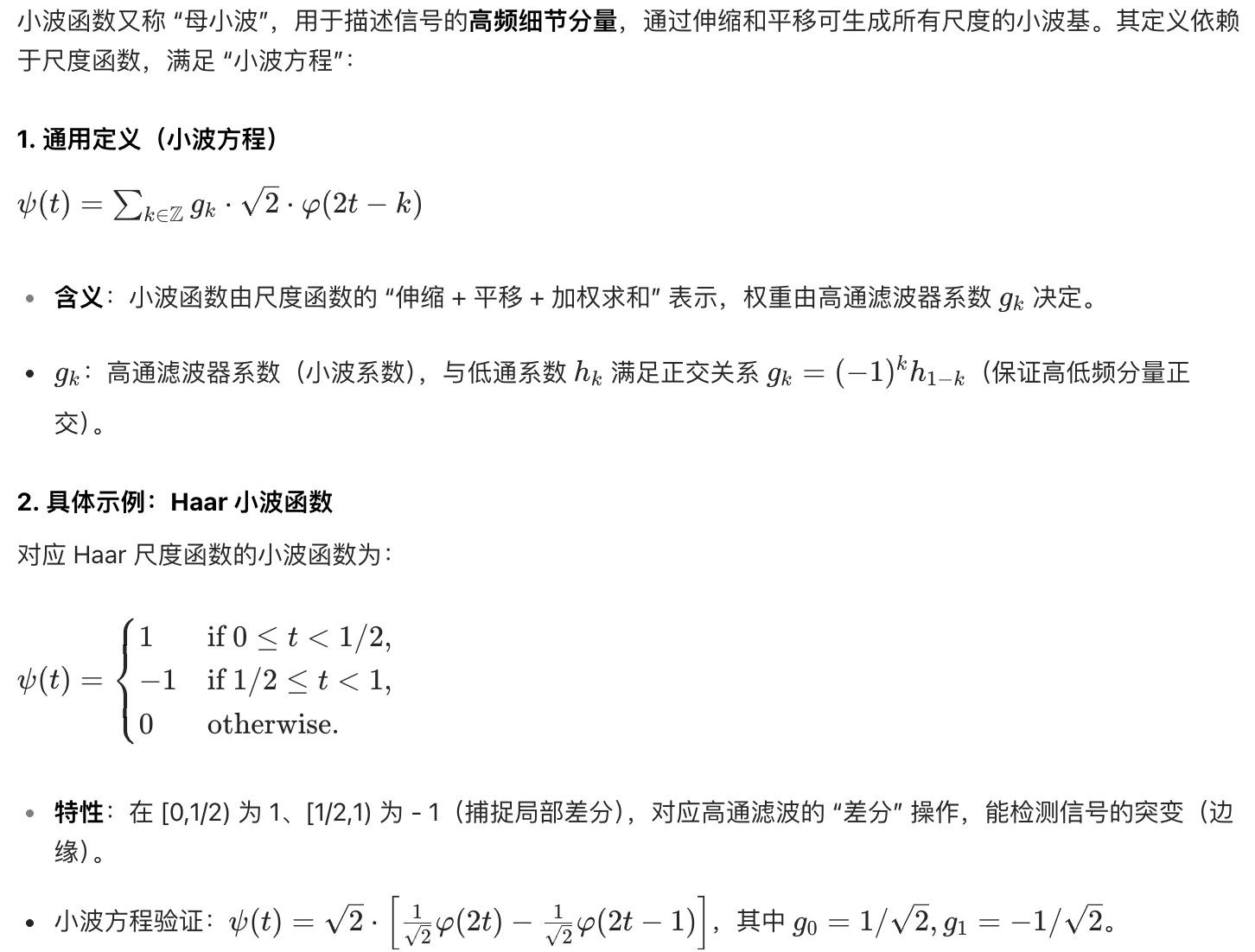
φ和ψ
φ:是希腊字母表的第二十一位字母,标准发音为 /ˈfaɪə/(美式音标),中文通常读作 “斐” 或 “菲”
ψ:是希腊字母表的第二十三位字母,标准发音为 /saɪ/(美式音标),中文通常读作 “赛”
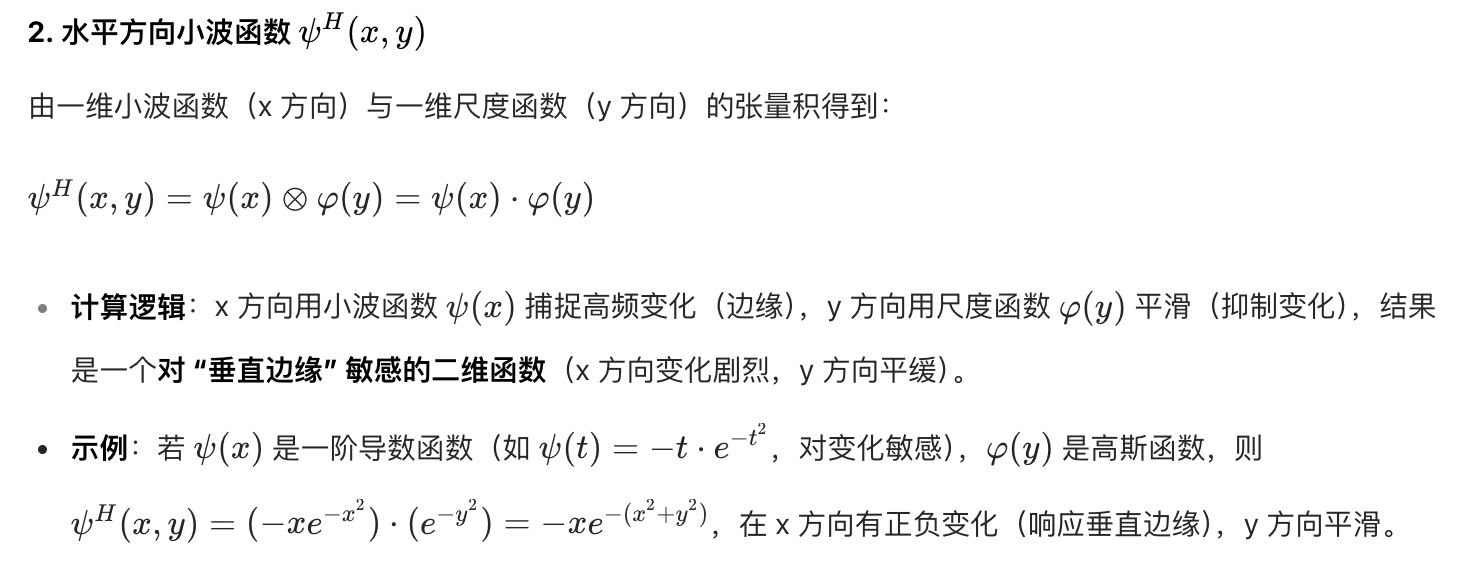
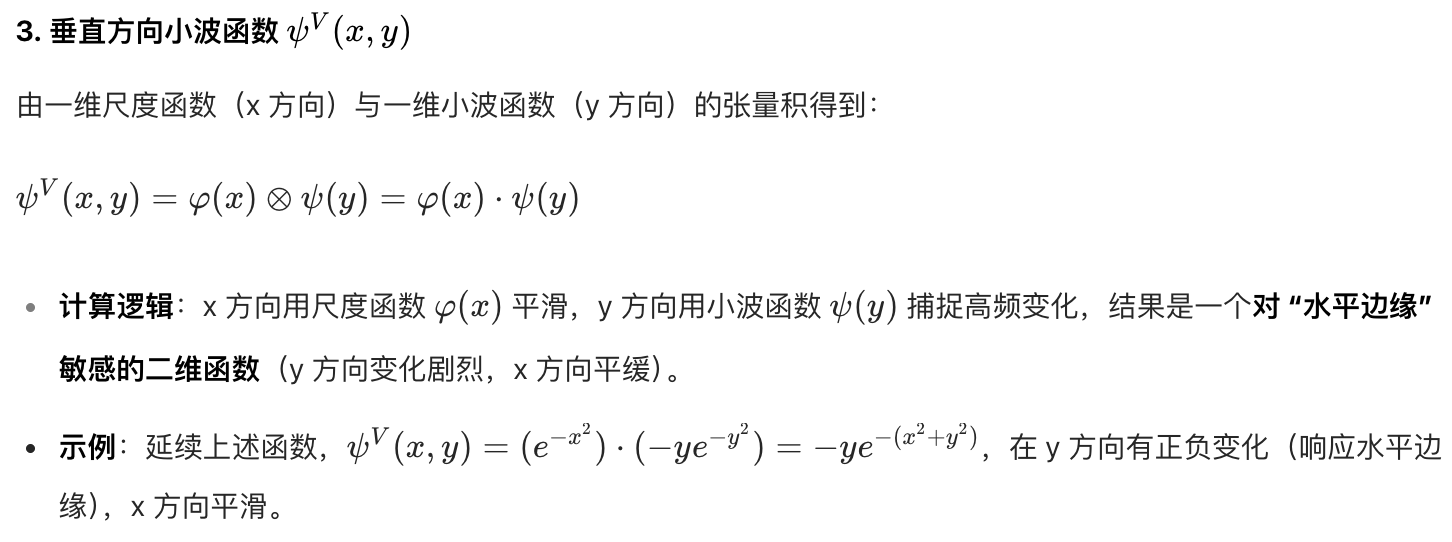
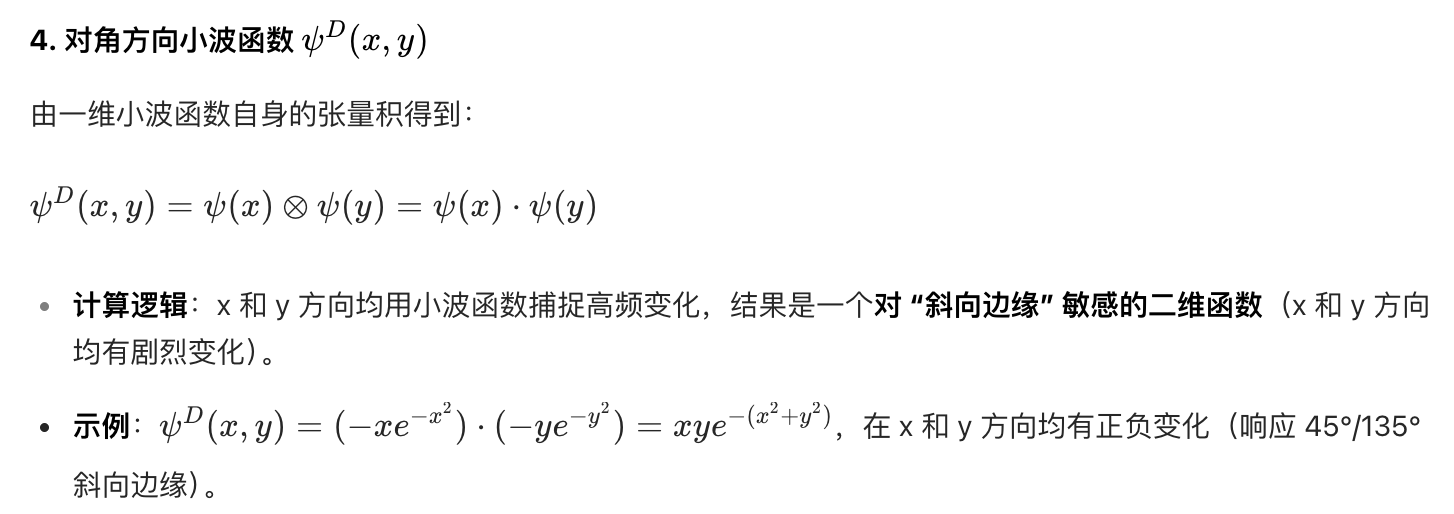
二维小波基元的具体计算
Diagonal daɪˈæɡən(ə)l 对角线的,对角的;斜的,斜线的;沿斜线运动的;斜线,斜纹;(几何学中的)对角线;矩阵对角线元素
张量积如何实现 “方向敏感性”
通过张量积构造的二维基元,本质是分离 x 和 y 方向的特征响应:
若某一方向用 “平滑的尺度函数”,则该方向的变化被抑制;
若某一方向用 “敏感的小波函数”,则该方向的变化被放大。
这种 “分离性” 使得 3 个小波函数能分别聚焦于垂直、水平、斜向的边缘
这正是小波变换能 “多方向提取特征” 的数学根源,也是它比高斯金字塔(无方向区分)更适合边缘检测的关键。