基于单片机直流电机PWM调速闭环控制系统Proteus仿真(含全部资料)
全套资料包含:Proteus仿真源文件+keil C语言源程序+AD原理图+流程图+元器件清单+说明书等
资料下载:
通过网盘分享的文件:资料分享
链接: 百度网盘 请输入提取码 提取码: tgnu
目录
资料下载:
Proteus仿真功能
项目文件资料:
一、Proteus仿真源文件
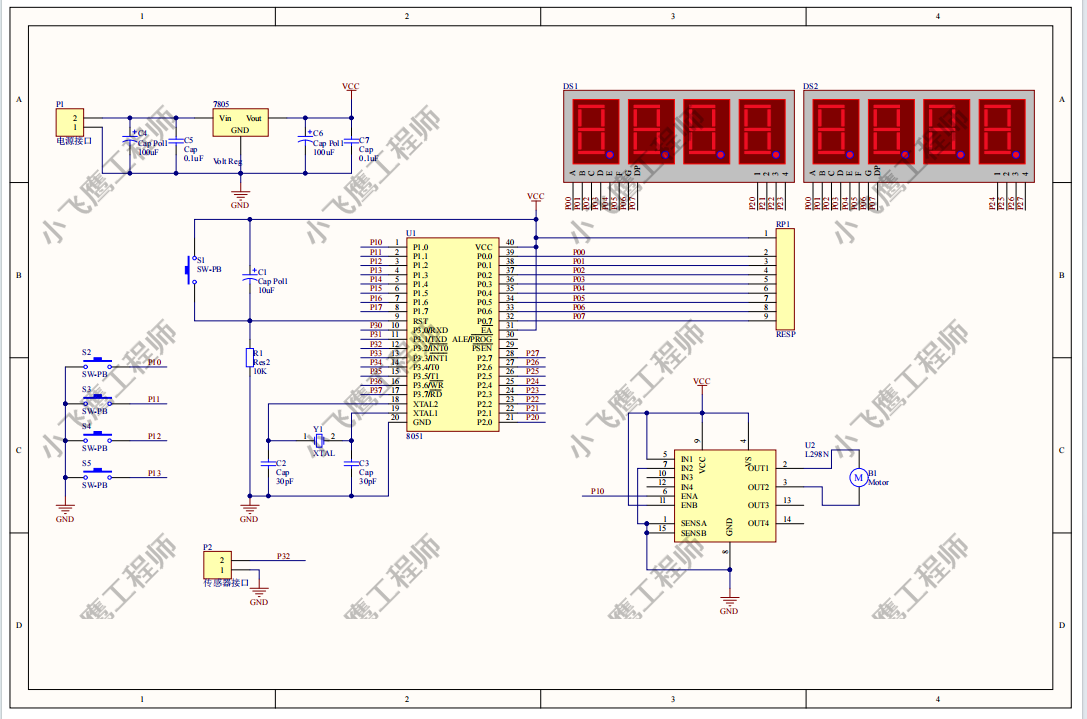
二、AD原理图文件
二、报告说明书
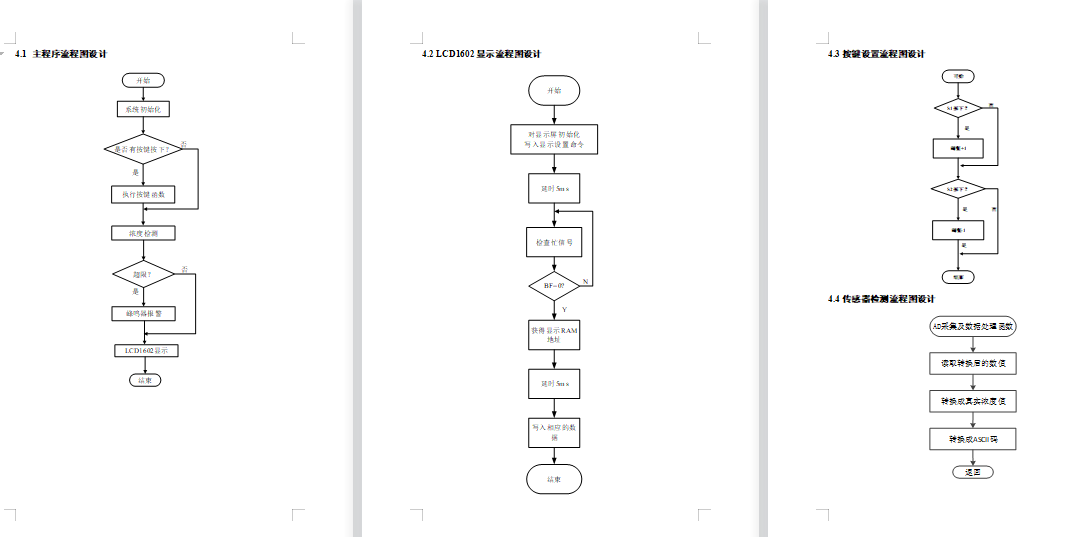
三、系统流程图
四、Keil c语言程序源代码
项目功能:
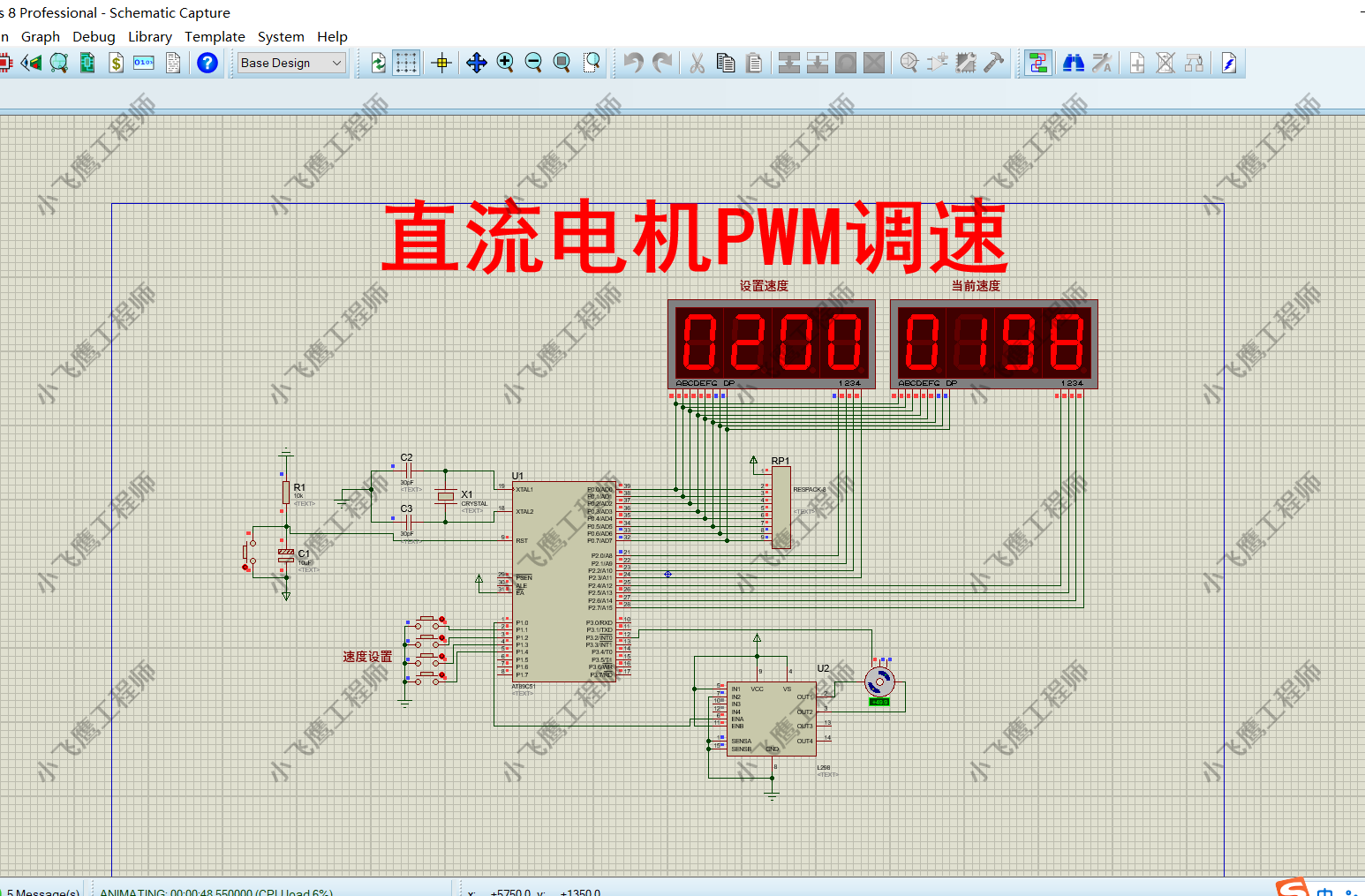
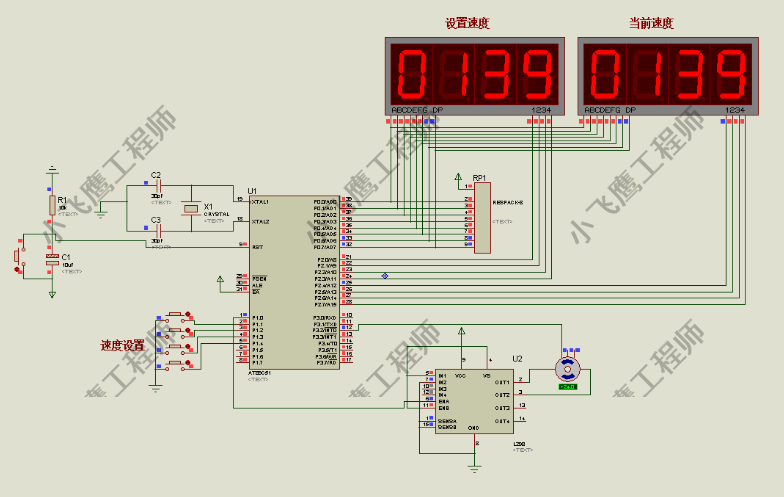
闭环直流PWM调速电机
1.仿真电路引脚说明
采用AT89C51单片机,晶振为12MHz,2个四位的共阴数码管,一个显示速度设定值,一个显示速度测量值,单位r/min;
P1.0用于产生PWM,用于直流电机调速;
P1.1~P1.4接4个独立按键,分别实现按下速度设定值加10,加1,减10,减1;
P2.0~P2.7接共阴数码管的段选,连接见仿真图;
P0.0~P0.7用于数码管位选,P0.3~P0.0对应实时速度的显示位选;P1.7~P1.4对应速度设定值的显示位选;
P3.2/INT0用于采集测速传感器的秒冲;
2.程序要求
四个按键(加10,加1,减10,减1)设置速度初定值,并送4位共阴数码管显示;测量实时速度,送另一个4位共阴数码管显示。能利用产生占空比可调的PWM控制速度到达设定值,由此形成闭环PWM调速直流电机。
项目文件:
一、Proteus仿真源文件
二、AD原理图文件
二、报告说明书
三、系统流程图
四、器件清单
| Designator | Footprint | LibRef |
| 7805 | D2PAK_N | Volt Reg |
| B1 | RB5-10.5 | Motor |
| C1, C4, C6 | RB7.6-15 | Cap Pol1 |
| C2, C3, C5, C7 | RAD-0.3 | Cap |
| DS1, DS2 | 数码管4 | |
| P1 | HDR1X2 | Header 2 |
| P2 | HDR1X2 | Header 2 |
| R1 | AXIAL-0.4 | Res2 |
| RP1 | RESP | |
| S1, S2, S3, S4, S5 | SPST-2 | SW-PB |
| U1 | 8051 | |
| U2 | L298N | |
| Y1 | R38 | XTAL |
五、Keil c语言程序源代码(部分)
#include "reg51.h" //此文件中定义了单片机的一些特殊功能寄存器#define uint unsigned int //对数据类型进行声明定义
#define uchar unsigned charsbit pwm=P1^0;//PWMsbit key1=P1^1;
sbit key2=P1^2;
sbit key3=P1^3;
sbit key4=P1^4;
//===============================
uint speed=0;
uint time=0,sec=0;//计时
uint sudu=200;//速度设定
uint pwm_time=500;//占空比0-1000
uint k;
//===================================================显示相关
uchar code smgduan0[10]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};//显示0~9,无小数点
uchar code smgduan1[10]={0xbf,0x86,0xdb,0xcf,0xe6,0xed,0xfd,0x87,0xff,0xef};//显示0~9,有小数点uchar see[8]={0x3f,0x06,0x3f,0x3f,0x3f,0x3f,0x3f,0x3f};//显存,设定速度+当前速度sbit smg1=P2^0;
sbit smg2=P2^1;
sbit smg3=P2^2;
sbit smg4=P2^3;
sbit smg5=P2^4;
sbit smg6=P2^5;
sbit smg7=P2^6;
sbit smg8=P2^7;void delay(uint i)//延时
{
while(i--)
{if(sec<1000)sec++;elsesec=0;if(sec<pwm_time)pwm=1;elsepwm=0;
}
}void display()//显示
{uchar i;for(i=0;i<8;i++){P0=0;P2=~(1<<i);P0=see[i];delay(100);}
}
//============================================================
/*******************************************************************************
* 函 数 名 : main
* 函数功能 : 主函数
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
void main()
{ //设置INT0TMOD|=0X01;//选择为定时器0模式,工作方式1,仅用TR0打开启动。TH0=(65536-50000)/256; //给定时器赋初值TL0=(65536-50000)%256; ET0=1;//打开定时器0中断允许EA=1;//打开总中断TR0=1;//打开定时器delay(50000);while(1){display();//显示if((k<sudu)&&(sudu-k>10)&&(pwm_time<1000)){ pwm_time++;}if((k>sudu)&&(k-sudu>10)&&(pwm_time>1))pwm_time--; if(!key1) //按键检测{if(sudu<1000)sudu+=10;while(!key1);}if(!key2){if(sudu<1000)sudu++;while(!key2);}if(!key3){if(sudu>1)sudu-=10;while(!key3);}if(!key4){if(sudu>1)sudu--;while(!key4);}}
}void Int0() interrupt 0 //外部中断0的中断函数
{
speed++;//速度计数
}void Timer0() interrupt 1
{ //=========================速度测量if(time<20)time++;else{time=0; //计算速度k=speed;speed=0;see[0]=smgduan0[sudu/1000];see[1]=smgduan0[sudu%1000/100];see[2]=smgduan0[sudu%100/10];see[3]=smgduan0[sudu%10];see[4]=smgduan0[k/1000];see[5]=smgduan0[k%1000/100];see[6]=smgduan0[k%100/10];see[7]=smgduan0[k%10];//调速,微调if((k<sudu)&&(sudu-k<11)&&(pwm_time<1000)){ pwm_time++;}if((k>sudu)&&(k-sudu<11)&&(pwm_time>1))pwm_time--; }TH0=(65536-50000)/256; //给定时器赋初值TL0=(65536-50000)%256;
}
六、全套资料包含
七:项目资源获取
需要完整的资料可以点击下面的名片关注,回复“资料”!
↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓↓