【不背八股】15.kmp算法/ Dijkstra算法/二叉树遍历
引言
在最近的笔试中,看到某些题型:KMP算法、Dijkstra算法等,以前学过,但印象不深,本文重新来温故梳理一下。
1. KMP算法
KMP 算法的核心在于:当匹配失败时,模式串并不需要完全回退,而是通过 部分匹配表(next 数组) 来决定下一步从哪里继续匹配。
换句话说,它利用了“已经匹配的前缀和后缀”之间的关系,避免了对主串的重复扫描。
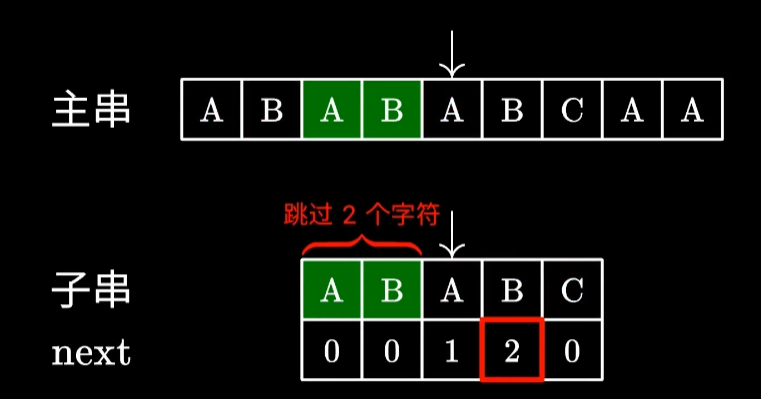
如下图[1]所示:
当字串C和主串A出现不匹配时,找到next数组前一个值(2),即跳过2个字符再开始匹配。
用程序可以表示如下:
vector<int> KMP(const string& text, const string& pattern) {vector<int> result;vector<int> next = buildNext(pattern);int n = text.size();int m = pattern.size();int j = 0; // 当前匹配的模式串长度for (int i = 0; i < n; i++) {while (j > 0 && text[i] != pattern[j]) {j = next[j - 1]; // 利用 next 回退}if (text[i] == pattern[j]) {j++;}if (j == m) {result.push_back(i - m + 1); // 记录匹配起始位置j = next[j - 1]; // 继续寻找下一个匹配}}return result;
}
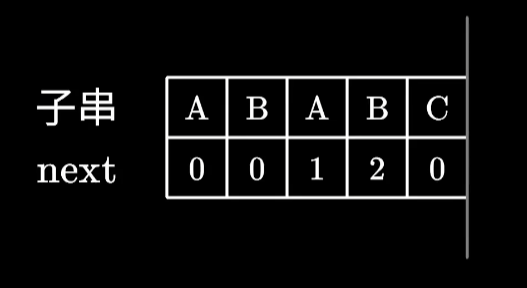
进一步思考,next数组是如何构建的?
next数组本质是记录相同前缀的长度,例如,下图第二个A发现前面已经有一个A了,next数组的对应位置就为1,第二个B发现前面已经有一个AB的共同前缀,next数组的对应位置就为2。
构建next数组的过程中,如果遇到下一个字符和前面不匹配的情况,并不是从头开始重新匹配,而是回退到上一个位置开始匹配,也是节省时间的一个小技巧,具体的代码如下:
vector<int> buildNext(const string& pattern) {int m = pattern.size();vector<int> next(m, 0);int j = 0; // 已匹配的前缀长度for (int i = 1; i < m; i++) {while (j > 0 && pattern[i] != pattern[j]) {j = next[j - 1]; // 回退}if (pattern[i] == pattern[j]) {j++;}next[i] = j;}return next;
}
2. Dijkstra算法
Dijkstra 算法属于单源最短路径问题,其理论基础是最短路径的最优子结构性质:
-
性质:如果从源点 sss 到终点 ttt 的最短路径是 P=(s→…→u→v→…→t)P = (s \to … \to u \to v \to … \to t)P=(s→…→u→v→…→t),
那么其中的子路径 (s→…→u)(s \to … \to u)(s→…→u) 也是从 sss 到 uuu 的最短路径。 -
意义:这说明可以通过逐步扩展最短路径来得到整体最优解,类似于贪心算法。
算法的具体思路如下图[2]所示
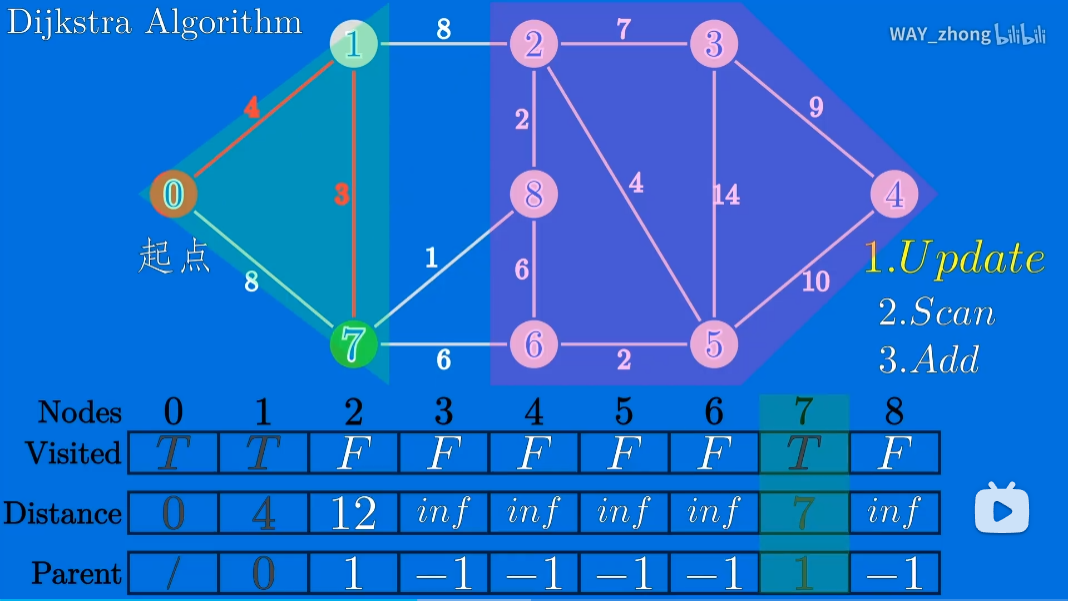
通过下面三个数组记录状态:
- Visited:记录每个节点是否访问过
- Distance:记录到起点到每一个节点的最短距离
- Parent:记录该点的上一个节点值
Dijkstra 算法将图分成两部分:
1.已访问集合(Visited = true)
- 起点开始,逐步扩展。
- 集合中的点的最短路径已被确定,不会再改变。
2.未访问集合(Visited = false)
- 存放那些还没有被完全确认最短路径的节点。
- 它们的 Distance 值会随着算法进行不断被更新。
算法的循环过程是:
-
1.从未访问集合中,选择一个 当前距离最小 的节点 u。
-
2.将 u 标记为已访问(Visited[u] = true)。
-
3.遍历 u 的所有邻居 v,如果通过 u 到 v 的路径更短,则更新:
Distance[v]=Distance[u]+w(u,v)Distance[v] = Distance[u] + w(u, v)Distance[v]=Distance[u]+w(u,v)
并记录
Parent[v]=uParent[v] = uParent[v]=u
-
4.重复以上步骤,直到所有节点访问完毕,或者目标节点的最短路径已经确定。
3. 二叉树前序、中序、后序遍历
还有一类经典的题型是给定两个二叉树序列遍历,求另一个序列遍历。
基础知识
在二叉树的遍历中,最常见的三种遍历方式是:
-
前序遍历(Preorder Traversal)
- 访问顺序:根 → 左子树 → 右子树
- 例如:
A B D E C F
-
中序遍历(Inorder Traversal)
- 访问顺序:左子树 → 根 → 右子树
- 例如:
D B E A F C
-
后序遍历(Postorder Traversal)
- 访问顺序:左子树 → 右子树 → 根
- 例如:
D E B F C A
已知前序和中序,求后序
思路解析
-
利用前序序列确定根节点
- 前序遍历的第一个元素一定是整棵树的根。
-
利用中序序列划分左右子树
- 在中序遍历中,根节点左边的部分是左子树,右边的部分是右子树。
-
递归处理子树
-
在左右子树中,重复上面的过程:
- 利用前序找到根;
- 在中序中分割;
- 递归构建。
-
-
得到后序遍历
- 根据定义,先递归输出左子树,再递归输出右子树,最后输出根。
示例
假设:
- 前序:
A B D E C F - 中序:
D B E A F C
过程如下:
-
前序首位
A→ 根节点。 -
中序中
A左边为D B E(左子树),右边为F C(右子树)。 -
左子树:
- 前序为
B D E - 中序为
D B E - 根为
B,左子树D,右子树E→ 后序为D E B。
- 前序为
-
右子树:
- 前序为
C F - 中序为
F C - 根为
C,左子树F→ 后序为F C。
- 前序为
-
整体后序为:
D E B F C A。
已知中序和后序,求前序
思路解析
-
利用后序序列确定根节点
- 后序遍历的最后一个元素一定是整棵树的根。
-
利用中序序列划分左右子树
- 在中序遍历中,根节点左边是左子树,右边是右子树。
-
递归处理子树
- 在左右子树中重复以上过程,逐步确定前序遍历。
-
得到前序遍历
- 根据定义,先输出根,再输出左子树,最后输出右子树。
示例
假设:
- 中序:
D B E A F C - 后序:
D E B F C A
过程如下:
-
后序最后一个
A→ 根节点。 -
中序中
A左边为D B E(左子树),右边为F C(右子树)。 -
左子树:
- 中序为
D B E - 后序为
D E B - 根为
B,左子树D,右子树E→ 前序为B D E。
- 中序为
-
右子树:
- 中序为
F C - 后序为
F C - 根为
C,左子树F→ 前序为C F。
- 中序为
-
整体前序为:
A B D E C F。
已知前序和后序,求中序
这一类题型相对特殊:
- 仅凭前序和后序序列,无法唯一确定一棵二叉树(因为中间的划分不唯一)。
- 但如果题目限定为 满二叉树,则可以唯一确定。
思路解析(满二叉树条件下)
-
前序序列确定根节点
- 前序的第一个元素为根。
-
后序序列确定子树范围
- 在后序中,最后一个元素是根。
- 前序第二个元素一定是左子树的根,可以在后序中找到它的位置,从而确定左子树的范围。
-
递归划分左右子树
- 重复该过程,逐步恢复中序。
-
得到中序遍历
- 根据定义,先输出左子树,再输出根,最后输出右子树。
示例
假设:
- 前序:
A B D E C F - 后序:
D E B F C A
过程如下(假设是满二叉树):
-
前序首位
A→ 根节点。 -
前序第二位
B是左子树的根,在后序中找到B,左子树范围是D E B。 -
左子树:
- 前序为
B D E - 后序为
D E B - 中序为
D B E。
- 前序为
-
右子树:
- 前序为
C F - 后序为
F C - 中序为
F C。
- 前序为
-
整体中序为:
D B E A F C。
总结
| 已知序列 | 可以唯一确定? | 确定方法 | 求解目标 | 思路简述 |
|---|---|---|---|---|
| 前序 + 中序 | ✅ 可以唯一确定 | 前序首位 → 根;在中序中定位根 → 左右子树 | 后序 | 递归构建左右子树,后序为「左 → 右 → 根」 |
| 中序 + 后序 | ✅ 可以唯一确定 | 后序末位 → 根;在中序中定位根 → 左右子树 | 前序 | 递归构建左右子树,前序为「根 → 左 → 右」 |
| 前序 + 后序 | ❌ 一般情况不唯一 ✅ 满二叉树时唯一 | 前序首位 → 根;前序第二位定位左子树,在后序中找到范围 | 中序 | 满二叉树条件下,递归划分左右子树,中序为「左 → 根 → 右」 |
参考
[1] 最浅显易懂的 KMP 算法讲解:https://www.bilibili.com/video/BV1AY4y157yL
[2] 图论最短距离(Shortest Path)算法动画演示-Dijkstra(迪杰斯特拉)和Floyd(弗洛伊德):https://www.bilibili.com/video/av5466852