2025年ESWA SCI1区TOP,复杂威胁环境下带偏差采样的多无人机路径规划、候选物评估与路径重构问题,深度解析+性能实测
目录
- 1.摘要
- 2.问题描述
- 3.MU-RRT*-BCR
- 4.结果展示
- 5.参考文献
- 6.代码获取
- 7.算法辅导·应用定制·读者交流
1.摘要
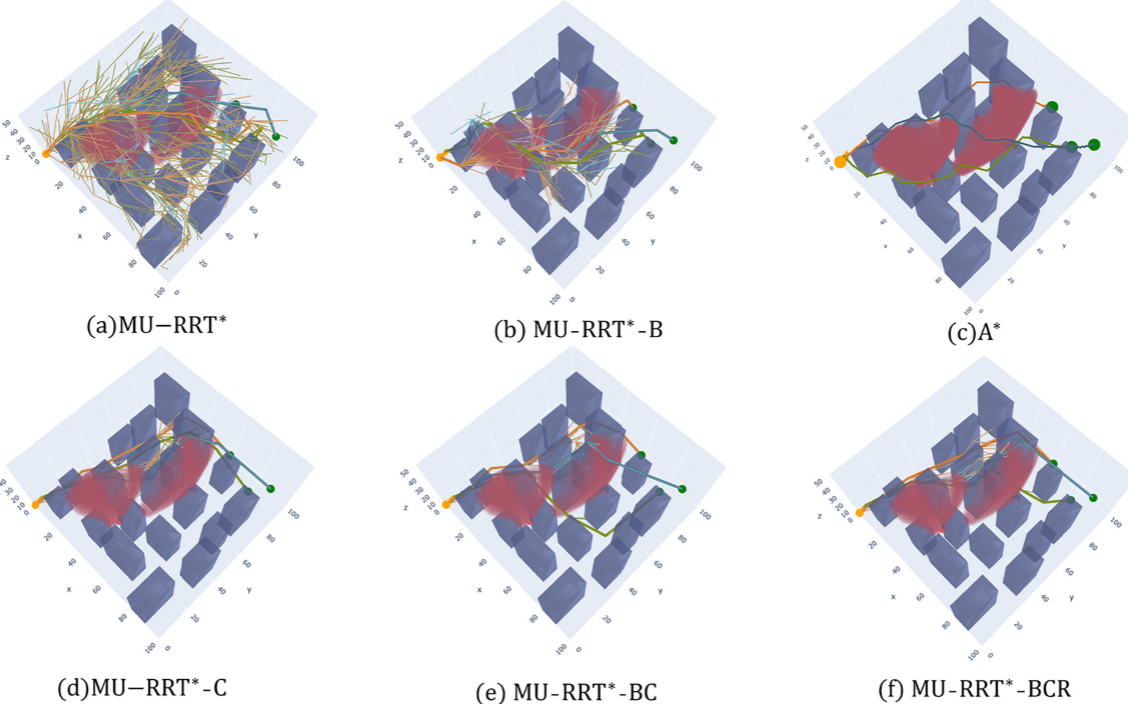
本文研究聚焦于复杂城市环境下的多无人机路径规划问题,传统方法在面对障碍物、信号干扰区及危险区域等威胁因素时往往力不从心。因此,本文提出了一种基于网格的建模方法,并设计了改进多无人机快速扩展随机树算法(MU-RRT*-BCR),融合了偏向采样、候选评估和路径重构方法。结果显示,该方法在节点选择与轨迹优化方面显著优于传统 MU-RRT* 与 A* 算法:相较于 MU-RRT* ,平均目标函数值下降 17.59%,CPU 时间缩短 81.26%;相较于 A*,则分别降低了 4.86% 与 65.91%。此外,算法还引入了安全检测机制以避免无人机间碰撞,并通过 Dubins 方法确保路径符合无人机运动学约束。
2.问题描述
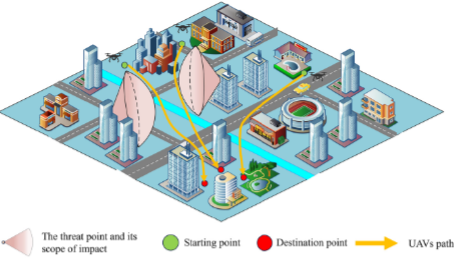
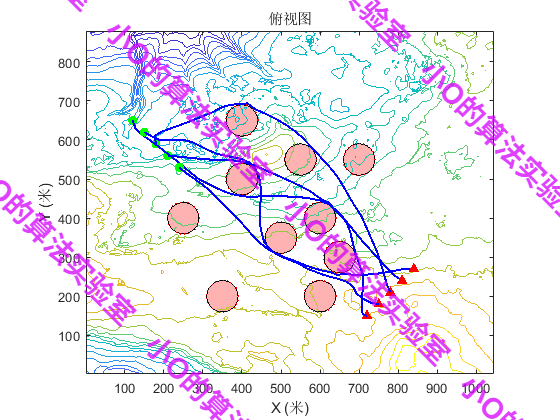
在城市威胁环境中,多无人机需规避建筑障碍并最小化威胁暴露以实现路径规划。环境模型中定义了两类危险源:建筑障碍(不可通行区域)和威胁点(风险可通行区域)。威胁值采用0-1量化体系,其中1代表绝对危险,0代表绝对安全。通过四元组参数定义威胁点特性,并引入建筑遮蔽效应计算有效威胁范围。
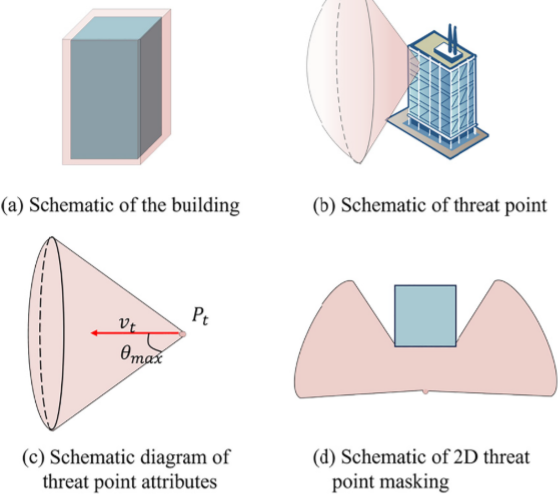
网格化建模
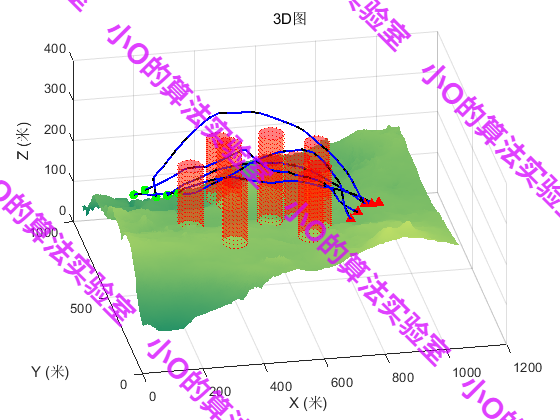
采用改进网格化方法将城市环境离散为立方体网格,蓝色网格表示建筑障碍,红色渐变网格表示威胁区域,灰色网格表示安全区域。威胁矩阵定义:
T={t(x,y,z)}(x=0,y=0,z=0)(xmax−1,ymax−1,zmax−1)T=\{t(x,y,z)\}_{(x=0,y=0,z=0)}^{(x_{\max}-1,y_{\max}-1,z_{\max}-1)} T={t(x,y,z)}(x=0,y=0,z=0)(xmax−1,ymax−1,zmax−1)
为保障飞行安全,将禁飞区域扩展至建筑网格周边26个相邻网格,形成安全缓冲带,对于威胁点影响范围内的网格,威胁值随距离增大而递减。当网格同时受多重威胁源影响时,采用威胁值累加机制,网格综合威胁值:
t(x,y,z)=min(1,∑i=1Nbtib(x,y,z)+∑i=1Nttit(x,y,z))t(x,y,z)=\min(1,\sum_{i=1}^{Nb}t_i^b(x,y,z)+\sum_{i=1}^{Nt}t_i^t(x,y,z)) t(x,y,z)=min(1,i=1∑Nbtib(x,y,z)+i=1∑Nttit(x,y,z))
路径表示
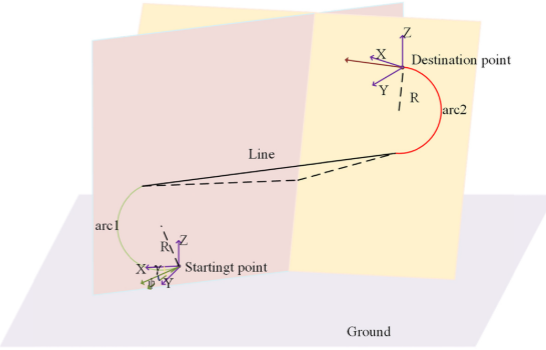
无人机路径需采用参数化表征以实现规划与控制,飞行路径定义为离散点集,并采用精确算法生成三维Dubins路径。
3.MU-RRT*-BCR
节点生成策略
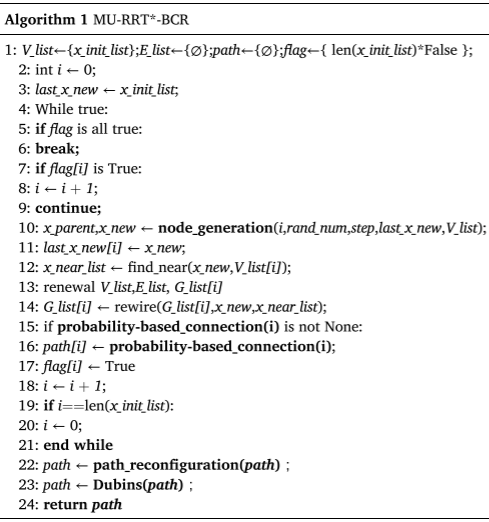
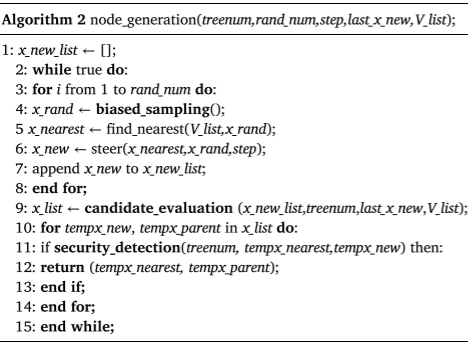
针对RRT* 算法随机采样导致的收敛速度慢和局部最优陷阱问题,本文提出新型节点生成策略,该策略通过三阶段优化:偏置采样,候选点生成,评估优选。通过多候选点并行评估机制,有效提升搜索效率并规避局部最优。
安全检测机制
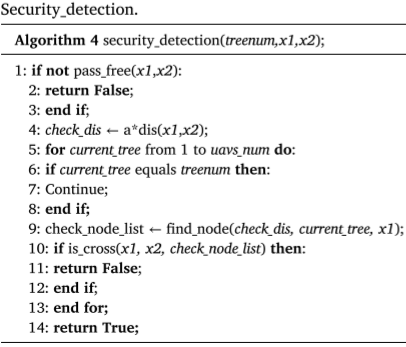
多无人机路径规划中的防撞机制通过安全检测算法实现,核心包含两个层级:可通行性检测和交叉检测。
基于概率的连接策略
引入概率检测机制优化算法终止条件,该机制通过三步骤实现早熟收敛:概率评估,近目标节点筛选,安全验证。
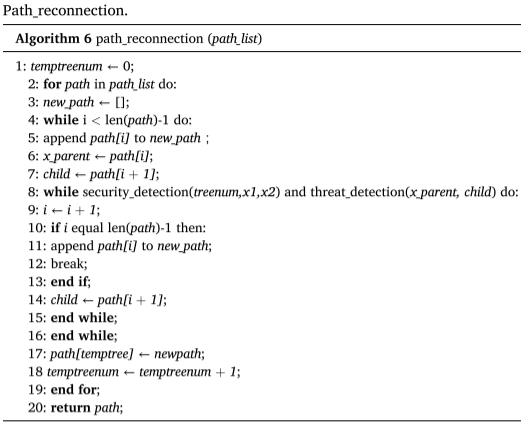
路径重构机制
本文提出基于三角不等式的多无人机路径重构机制,通过三级优化提升路径质量:安全连接验证,局部优化迭代和全局路径精简。
4.结果展示
5.参考文献
[1] Chen Z, Luo Z, Jin X, et al. Multi-UAV path planning problem with biased sampling, candidate evaluation, and path reconfiguration in complex environment with threats[J]. Expert Systems with Applications, 2025: 128558.
6.代码获取
xx
7.算法辅导·应用定制·读者交流
xx