手眼标定问题总结
记录平常标定中遇到的问题和总结的方法,方便后续查阅。
目录
- 1.角点检测前图像需要去畸变
- 2.眼在手上标定的结果
- 3.眼在手外标定公式
- 4.标定过程中数据采集的注意事项
1.角点检测前图像需要去畸变
做手眼标定时,获取到的图像都需要做畸变校正(事先需要做相机标定,通过相机内参进行畸变矫正,可以用opencv自带的函数),使用畸变校正后的图像进行手眼标定计算
2.眼在手上标定的结果
需要注意,输入机器人位姿的时候,如果带TCP,那么最终的结果就是计算相机到TCP的位姿,如果不带TCP,拿结果就是计算相机到机械臂末端的位姿。
3.眼在手外标定公式
眼在手外标定的过程是机械臂夹持标定板去拍照,此时输入公式的是取机械臂末端或者TCP相对于机器人基座的位姿数据,但是标定板和机械臂末端不是有距离吗?
因为标定板到机械臂末端的位姿关系是始终不变的,下面的公式中,等式左边是不变的,我们罗列等式右边的计算关系。

4.标定过程中数据采集的注意事项
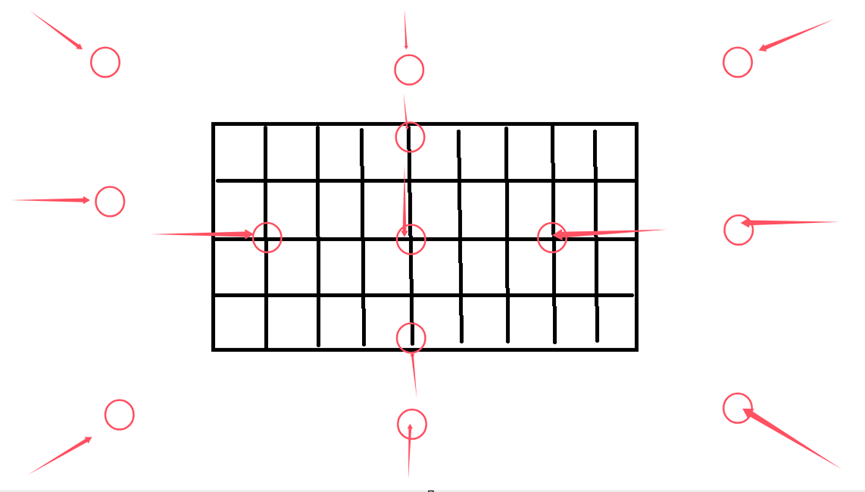
拍摄的标定板图像要尽量覆盖整张图像,至少13张(因为有12个未知数),每张图像进行角点检测时,需要看下识别的角点方向是否一致,否则对结果影响很大。
可以参考如下的角度进行图像的采集。