LeetCode算法领域的经典题目之“三数之和”和“滑动窗口最大值”问题

🧑 博主简介:CSDN博客专家、CSDN平台优质创作者,高级开发工程师,数学专业,10年以上C/C++, C#,Java等多种编程语言开发经验,拥有高级工程师证书;擅长C/C++、C#等开发语言,熟悉Java常用开发技术,能熟练应用常用数据库SQL server,Oracle,mysql,postgresql等进行开发应用,熟悉DICOM医学影像及DICOM协议,业余时间自学JavaScript,Vue,qt,python等,具备多种混合语言开发能力。撰写博客分享知识,致力于帮助编程爱好者共同进步。欢迎关注、交流及合作,提供技术支持与解决方案。\n技术合作请加本人wx(注明来自csdn):xt20160813
一、前言摘要
“三数之和”和“滑动窗口最大值”是LeetCode算法领域的经典题目,分别涉及数组组合查找和动态窗口处理,在医学影像AI中有广泛应用,如特征匹配、像素值配对和时间序列分析。本文以LeetCode 15(三数之和)和LeetCode 239(滑动窗口最大值)为核心,基于Python实现暴力解法、优化解法,并扩展到医学影像场景(如LUNA16数据集的3D特征匹配和时间序列CT分析)。内容涵盖问题描述、解题原理、详细代码、复杂度分析、优化策略、流程图,以及在DICOM影像处理中的应用案例。本文特别关注算法在医学影像中的挑战(如高维数据、实时性、噪声干扰),提出优化方案,并探讨算法在特征提取、病灶检测和诊断中的扩展应用,为算法学习者和医学影像AI从业者提供理论与实践的全面指导。
二、项目概述
2.1 项目目标
- 功能:
- 三数之和:在数组中找到所有和为目标值(默认0)的三个数组合,返回唯一的三元组。
- 滑动窗口最大值:在固定窗口内找到每个窗口的最大值,返回最大值序列。
- 医学影像应用:适配特征匹配(三数之和)和时间序列分析(滑动窗口最大值)。
- 意义:
- 算法基础:掌握数组操作、双指针、单调队列等核心技术。
- 医学影像应用:支持特征匹配、病灶定位、时间序列分析。
- 实时性:优化算法以满足临床低延迟需求。
- 可扩展性:扩展到3D影像或多模态数据处理。
- 目标:
- 实现三数之和的暴力解法和双指针解法,比较性能。
- 实现滑动窗口最大值的暴力解法和单调队列解法,比较性能。
- 扩展到医学影像场景(如LUNA16数据集的特征匹配和CT序列分析)。
- 优化算法性能,降低时间和空间复杂度。
- 提供性能可视化(运行时间、内存占用)。
- 探讨算法在医学影像AI中的应用(如肺结节检测、时间序列诊断)。
2.2 数据背景
- 三数之和(LeetCode 15):
- 输入:整数数组
nums。 - 输出:所有和为0的唯一三元组
[nums[i], nums[j], nums[k]],满足i != j != k。 - 约束:
- 数组长度 nnn 范围:0≤n≤30000 \leq n \leq 30000≤n≤3000。
- 元素范围:−105≤nums[i]≤105-10^5 \leq nums[i] \leq 10^5−105≤nums[i]≤105。
- 结果不能包含重复三元组。
- 医学影像场景:
- 特征匹配:在ViT或U-Net提取的特征向量中,寻找和为目标值的三元特征组合(如肺结节特征配对)。
- 像素值配对:在DICOM影像中,寻找HU值和为目标值的三像素组合。
- 输入:整数数组
- 滑动窗口最大值(LeetCode 239):
- 输入:整数数组
nums和窗口大小k。 - 输出:每个窗口的最大值序列。
- 约束:
- 数组长度 nnn 范围:1≤n≤1051 \leq n \leq 10^51≤n≤105。
- 元素范围:−104≤nums[i]≤104-10^4 \leq nums[i] \leq 10^4−104≤nums[i]≤104。
- 窗口大小:1≤k≤n1 \leq k \leq n1≤k≤n。
- 医学影像场景:
- 时间序列分析:在CT序列中,分析固定时间窗口内的最大HU值(如肺结节变化检测)。
- 特征提取:在特征序列中,提取窗口内的最大特征值。
- 输入:整数数组
- 挑战:
- 高维数据:3D影像需分块或降维处理。
- 实时性:临床诊断要求低延迟算法。
- 噪声干扰:像素值或特征可能包含伪影。
- 数据规模:医学影像数据量大,需高效算法。
2.3 技术栈
- Python:实现三数之和和滑动窗口最大值算法。
- NumPy:处理高维数组(如3D CT影像)。
- PyTorch/MONAI:提取影像特征,适配医学影像处理。
- Matplotlib/Chart.js:可视化算法性能(时间、内存)。
- pydicom:读取DICOM影像。
- scikit-learn:分析特征重要性。
- Mermaid:绘制算法流程图。
- Docker:可选容器化部署,适配云端推理。
2.4 算法在医学影像AI中的意义
- 三数之和:
- 特征匹配:在ViT/U-Net提取的特征中,寻找和为目标值的三元特征组合,辅助肺结节分类。
- 像素值配对:在DICOM影像中,寻找HU值和为目标值的三像素组合,定位病灶。
- 滑动窗口最大值:
- 时间序列分析:在CT序列中,提取窗口内的最大HU值,检测肺结节变化。
- 特征提取:在特征序列中,提取窗口内的最大特征值,优化诊断模型。
- 实时性:高效算法满足临床诊断的低延迟需求。
三、算法原理
3.1 三数之和(3Sum)
3.1.1 问题描述
给定一个整数数组 nums,找到所有满足 nums[i] + nums[j] + nums[k] == 0 的三元组,返回唯一的三元组列表。
示例:
- 输入:
nums = [-1, 0, 1, 2, -1, -4] - 输出:
[[-1, -1, 2], [-1, 0, 1]]
3.1.2 解题思路
暴力解法
- 原理:三重循环遍历所有三元组,检查和是否为0。
- 步骤:
- 使用三重循环遍历
i,j,k。 - 如果
nums[i] + nums[j] + nums[k] == 0,记录三元组。 - 使用集合去重,确保结果唯一。
- 使用三重循环遍历
- 时间复杂度:O(n3)O(n^3)O(n3),三重循环。
- 空间复杂度:O(1)O(1)O(1),不计输出空间。
- 缺点:效率低,不适合医学影像大数据量场景。
双指针解法
- 原理:排序数组后,固定一个元素,使用双指针寻找剩余两个元素。
- 步骤:
- 对数组排序,时间复杂度 O(nlogn)O(n \log n)O(nlogn)。
- 遍历固定元素
nums[i],在剩余数组中使用双指针left和right:- 如果
nums[i] + nums[left] + nums[right] == 0,记录三元组。 - 如果和小于0,
left += 1;如果和大于0,right -= 1。
- 如果
- 跳过重复元素,避免重复三元组。
- 时间复杂度:O(n2)O(n^2)O(n2),排序 O(nlogn)O(n \log n)O(nlogn),双指针 O(n)O(n)O(n)。
- 空间复杂度:O(1)O(1)O(1),不计排序空间。
- 适用场景:高效,适合医学影像特征匹配。
3.1.3 医学影像适用性
- 特征匹配:在ViT/U-Net提取的特征向量中,寻找和为目标值的三元特征组合。
- 像素值配对:在DICOM影像中,寻找HU值和为目标值的三像素组合。
- 3D扩展:分块处理3D CT影像,适配肺结节检测。
3.2 滑动窗口最大值
3.2.1 问题描述
给定一个整数数组 nums 和窗口大小 k,返回每个窗口的最大值序列。
示例:
- 输入:
nums = [1, 3, -1, -3, 5, 3, 6, 7], k = 3 - 输出:
[3, 3, 5, 5, 6, 7]
3.2.2 解题思路
暴力解法
- 原理:对每个窗口,遍历窗口内元素,找到最大值。
- 步骤:
- 遍历每个窗口(从索引
0到n-k)。 - 对窗口内
k个元素,计算最大值。 - 记录最大值序列。
- 遍历每个窗口(从索引
- 时间复杂度:O(n⋅k)O(n \cdot k)O(n⋅k),每个窗口需 O(k)O(k)O(k)。
- 空间复杂度:O(1)O(1)O(1),不计输出空间。
- 缺点:效率低,不适合医学影像大数据量。
单调队列解法
- 原理:使用双端队列维护窗口内可能的最大值,保持队列单调递减。
- 步骤:
- 初始化双端队列,存储元素索引。
- 遍历数组:
- 移除队列中超出窗口的索引。
- 移除队列尾部小于当前元素的值(保持单调递减)。
- 将当前索引加入队列。
- 如果窗口已满(
i >= k-1),记录队列头部(最大值)。
- 时间复杂度:O(n)O(n)O(n),每个元素入队出队一次。
- 空间复杂度:O(k)O(k)O(k),队列存储最多 kkk 个索引。
- 适用场景:高效,适合医学影像时间序列分析。
3.2.3 医学影像适用性
- 时间序列分析:在CT序列中,提取窗口内最大HU值,检测肺结节变化。
- 特征提取:在特征序列中,提取窗口内最大特征值,优化诊断模型。
- 实时性:单调队列高效,满足临床低延迟需求。
3.3 算法挑战
- 高维数据:3D影像需分块或降维处理。
- 实时性:临床诊断要求低延迟算法。
- 噪声干扰:像素值或特征可能包含噪声,需预处理。
- 可扩展性:需支持多目标匹配或动态窗口大小。
四、算法实现
4.1 三数之和(3Sum)
4.1.1 暴力解法
流程图
graph TDA[输入: nums] --> B[初始化结果: res = []]B --> C[遍历 i = 0 to n-1]C --> D[遍历 j = i+1 to n-1]D --> E[遍历 k = j+1 to n-1]E --> F{nums[i] + nums[j] + nums[k] == 0?}F -->|是| G[添加 [nums[i], nums[j], nums[k]] 到 res]F -->|否| EG --> H[去重: 排序+集合]H --> I[输出结果]
说明:
- A:输入整数数组。
- B:初始化空结果列表。
- C-E:三重循环遍历三元组。
- F-G:检查和是否为0,记录三元组。
- H-I:去重并输出结果。
代码实现
def three_sum_brute_force(nums: list[int]) -> list[list[int]]:"""暴力解法:三重循环查找和为0的三元组Args:nums: 整数数组Returns:唯一三元组列表"""n = len(nums)result = set()for i in range(n):for j in range(i + 1, n):for k in range(j + 1, n):if nums[i] + nums[j] + nums[k] == 0:triplet = tuple(sorted([nums[i], nums[j], nums[k]])) # 排序去重result.add(triplet)return [list(triplet) for triplet in result]
代码注释:
three_sum_brute_force:三重循环检查和为0的三元组。set:使用集合去重,排序确保三元组唯一。- 时间复杂度:O(n3)O(n^3)O(n3),三重循环。
- 空间复杂度:O(1)O(1)O(1),不计输出空间。
- 适用性:适合小规模数据,验证正确性。
4.1.2 双指针解法
流程图
graph TDA[输入: nums] --> B[排序数组]B --> C[初始化结果: res = []]C --> D[遍历 i = 0 to n-3]D --> E[跳过重复 nums[i]]E --> F[初始化 left = i+1, right = n-1]F --> G{left < right?}G -->|是| H[计算 sum = nums[i] + nums[left] + nums[right]]H --> I{sum == 0?}I -->|是| J[添加 [nums[i], nums[left], nums[right]] 到 res]I -->|否| K{sum < 0?}K -->|是| L[left += 1]K -->|否| M[right -= 1]J --> N[跳过重复 left, right]N --> GM --> GL --> GG -->|否| DD --> O[输出结果]
说明:
- A-B:输入并排序数组。
- C-E:初始化结果,遍历固定元素,跳过重复。
- F-N:双指针寻找剩余两元素,处理重复。
- O:输出结果。
代码实现
def three_sum(nums: list[int]) -> list[list[int]]:"""双指针解法:排序后固定一个元素,使用双指针查找Args:nums: 整数数组Returns:唯一三元组列表"""nums.sort() # O(n log n)n = len(nums)result = []for i in range(n - 2):if i > 0 and nums[i] == nums[i - 1]: # 跳过重复continueleft, right = i + 1, n - 1while left < right:total = nums[i] + nums[left] + nums[right]if total == 0:result.append([nums[i], nums[left], nums[right]])left += 1right -= 1while left < right and nums[left] == nums[left - 1]: # 跳过重复left += 1while left < right and nums[right] == nums[right + 1]:right -= 1elif total < 0:left += 1else:right -= 1return result
代码注释:
sort:排序数组,确保双指针高效且去重。left, right:双指针寻找剩余两元素。- 时间复杂度:O(n2)O(n^2)O(n2),排序 O(nlogn)O(n \log n)O(nlogn),双指针 O(n)O(n)O(n)。
- 空间复杂度:O(1)O(1)O(1),不计排序空间。
- 适用性:高效,适合医学影像特征匹配。
4.1.3 医学影像扩展:3D特征匹配
在3D CT影像中,寻找特征和为目标值的三元组。
代码实现
import torch
import numpy as np
from monai.networks.nets import UNet
from monai.transforms import Compose, LoadImaged, EnsureChannelFirstd, ScaleIntensityRanged# 特征提取
def extract_features(model, image_path, device):"""使用U-Net提取3D CT影像特征Args:model: 预训练U-Net模型image_path: DICOM影像路径device: 计算设备Returns:展平的特征向量"""model.eval()transform = Compose([LoadImaged(keys=['image']),EnsureChannelFirstd(keys=['image']),ScaleIntensityRanged(keys=['image'], a_min=-1000, a_max=400, b_min=0.0, b_max=1.0)])data = transform({'image': image_path})image = data['image'].unsqueeze(0).to(device)with torch.no_grad():features = model(image).flatten().cpu().numpy()return features# 3D特征三数之和
def three_sum_3d_features(image_path, target, device, model):"""在3D CT影像特征中寻找和为目标值的三元组Args:image_path: DICOM影像路径target: 目标值device: 计算设备model: 预训练U-Net模型Returns:三元组列表"""features = extract_features(model, image_path, device)features.sort()n = len(features)result = []for i in range(n - 2):if i > 0 and features[i] == features[i - 1]:continueleft, right = i + 1, n - 1while left < right:total = features[i] + features[left] + features[right]if abs(total - target) < 1e-6: # 浮点数比较result.append([features[i], features[left], features[right]])left += 1right -= 1while left < right and features[left] == features[left - 1]:left += 1while left < right and features[right] == features[right + 1]:right -= 1elif total < target:left += 1else:right -= 1return result# 主程序
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
model_unet = UNet(spatial_dims=3,in_channels=1,out_channels=2,channels=(16, 32, 64, 128, 256),strides=(2, 2, 2, 2),num_res_units=2
).to(device)
result = three_sum_3d_features('path/to/dicom.dcm', target=0.0, device=device, model=model_unet)
print(f"3D特征三数之和结果: {result}")
代码注释:
extract_features:使用U-Net提取3D CT特征,展平为1D向量。three_sum_3d_features:应用双指针解法,寻找特征三元组。- 时间复杂度:O(n2)O(n^2)O(n2),n 为特征向量长度。
- 空间复杂度:O(1)O(1)O(1),不计输出空间。
- 适用性:适配3D影像特征匹配。
4.2 滑动窗口最大值
4.2.1 暴力解法
流程图
graph TDA[输入: nums, k] --> B[初始化结果: res = []]B --> C[遍历 i = 0 to n-k]C --> D[提取窗口 nums[i:i+k]]D --> E[计算窗口最大值]E --> F[添加最大值到 res]F --> CC --> G[输出结果]
说明:
- A:输入数组和窗口大小。
- B:初始化空结果列表。
- C-F:遍历窗口,计算最大值。
- G:输出结果。
代码实现
def max_sliding_window_brute_force(nums: list[int], k: int) -> list[int]:"""暴力解法:对每个窗口计算最大值Args:nums: 整数数组k: 窗口大小Returns:每个窗口的最大值列表"""n = len(nums)result = []for i in range(n - k + 1):result.append(max(nums[i:i + k]))return result
代码注释:
max_sliding_window_brute_force:遍历每个窗口,计算最大值。- 时间复杂度:O(n⋅k)O(n \cdot k)O(n⋅k),每个窗口需 O(k)O(k)O(k)。
- 空间复杂度:O(1)O(1)O(1),不计输出空间。
- 适用性:适合小规模数据。
4.2.2 单调队列解法
流程图
graph TDA[输入: nums, k] --> B[初始化双端队列: deque = []]B --> C[初始化结果: res = []]C --> D[遍历 i = 0 to n-1]D --> E[移除超出窗口的索引]E --> F[移除队列尾部小于 nums[i] 的索引]F --> G[添加索引 i 到队列]G --> H{i >= k-1?}H -->|是| I[添加队列头部到 res]I --> DH --> DD --> J[输出结果]
说明:
- A-C:输入数组和窗口大小,初始化队列和结果。
- D-G:遍历数组,维护单调递减队列。
- H-J:记录窗口最大值,输出结果。
代码实现
from collections import dequedef max_sliding_window(nums: list[int], k: int) -> list[int]:"""单调队列解法:使用双端队列维护窗口最大值Args:nums: 整数数组k: 窗口大小Returns:每个窗口的最大值列表"""n = len(nums)result = []dq = deque()for i in range(n):# 移除超出窗口的索引while dq and dq[0] <= i - k:dq.popleft()# 移除队列尾部小于当前元素的值while dq and nums[dq[-1]] <= nums[i]:dq.pop()# 添加当前索引dq.append(i)# 窗口满时记录最大值if i >= k - 1:result.append(nums[dq[0]])return result
代码注释:
deque:双端队列,维护单调递减的索引。- 时间复杂度:O(n)O(n)O(n),每个元素入队出队一次。
- 空间复杂度:O(k)O(k)O(k),队列存储最多 kkk 个索引。
- 适用性:高效,适合医学影像时间序列分析。
4.2.3 医学影像扩展:CT序列分析
在CT序列中,提取窗口内最大HU值。
代码实现
import pydicom
import numpy as np
from collections import dequedef max_sliding_window_dicom(dicom_paths, k):"""在CT序列中提取窗口内最大HU值Args:dicom_paths: DICOM文件路径列表k: 窗口大小Returns:最大HU值序列"""hu_values = []for path in dicom_paths:ds = pydicom.dcmread(path)hu_values.append(np.max(ds.pixel_array)) # 提取最大HU值result = []dq = deque()for i in range(len(hu_values)):while dq and dq[0] <= i - k:dq.popleft()while dq and hu_values[dq[-1]] <= hu_values[i]:dq.pop()dq.append(i)if i >= k - 1:result.append(hu_values[dq[0]])return result# 主程序
dicom_paths = ['path/to/dicom1.dcm', 'path/to/dicom2.dcm', ...]
result = max_sliding_window_dicom(dicom_paths, k=3)
print(f"CT序列窗口最大HU值: {result}")
代码注释:
max_sliding_window_dicom:在CT序列中提取窗口最大HU值。- 时间复杂度:O(n)O(n)O(n),n 为序列长度。
- 空间复杂度:O(k)O(k)O(k),队列存储最多 kkk 个索引。
- 适用性:适配CT序列分析,检测肺结节变化。
五、评估与优化
5.1 评估方法
- 三数之和:
- 正确性:验证三元组是否满足和为0且唯一。
- 时间复杂度:运行时间(秒)。
- 空间复杂度:内存占用(MB)。
- 滑动窗口最大值:
- 正确性:验证每个窗口的最大值是否正确。
- 时间复杂度:运行时间(秒)。
- 空间复杂度:内存占用(MB)。
- 医学影像场景:
- 特征匹配精度:检查三元组是否对应正确病灶。
- HU值分析:验证窗口最大HU值是否准确。
- 推理时间:评估实时性。
5.2 代码实现
import time
import psutil
import matplotlib.pyplot as plt
import numpy as np
from collections import deque# 评估三数之和
def evaluate_three_sum(nums):"""评估三数之和的暴力解法和双指针解法Args:nums: 整数数组Returns:性能指标"""process = psutil.Process()# 暴力解法start_time = time.time()result_brute = three_sum_brute_force(nums)time_brute = time.time() - start_timemem_brute = process.memory_info().rss / 1024 / 1024# 双指针解法start_time = time.time()result_hash = three_sum(nums)time_hash = time.time() - start_timemem_hash = process.memory_info().rss / 1024 / 1024return {'brute': {'time': time_brute, 'memory': mem_brute, 'result': result_brute},'hash': {'time': time_hash, 'memory': mem_hash, 'result': result_hash}}# 评估滑动窗口最大值
def evaluate_max_sliding_window(nums, k):"""评估滑动窗口最大值的暴力解法和单调队列解法Args:nums: 整数数组k: 窗口大小Returns:性能指标"""process = psutil.Process()# 暴力解法start_time = time.time()result_brute = max_sliding_window_brute_force(nums, k)time_brute = time.time() - start_timemem_brute = process.memory_info().rss / 1024 / 1024# 单调队列解法start_time = time.time()result_deque = max_sliding_window(nums, k)time_deque = time.time() - start_timemem_deque = process.memory_info().rss / 1024 / 1024return {'brute': {'time': time_brute, 'memory': mem_brute, 'result': result_brute},'deque': {'time': time_deque, 'memory': mem_deque, 'result': result_deque}}# 测试数据
nums = np.random.randint(-100, 100, size=1000).tolist()
k = 10
results_three_sum = evaluate_three_sum(nums)
results_sliding_window = evaluate_max_sliding_window(nums, k)# 可视化
plt.figure(figsize=(12, 5))
plt.subplot(1, 2, 1)
plt.bar(['暴力解法', '双指针解法'], [results_three_sum['brute']['time'], results_three_sum['hash']['time']],color=['#FF6384', '#36A2EB'])
plt.title('三数之和运行时间对比')
plt.ylabel('时间 (秒)')plt.subplot(1, 2, 2)
plt.bar(['暴力解法', '单调队列解法'], [results_sliding_window['brute']['time'], results_sliding_window['deque']['time']],color=['#FF6384', '#36A2EB'])
plt.title('滑动窗口最大值运行时间对比')
plt.ylabel('时间 (秒)')
plt.show()print(f"3Sum 暴力解法: 时间={results_three_sum['brute']['time']:.6f}秒, 内存={results_three_sum['brute']['memory']:.2f}MB")
print(f"3Sum 双指针解法: 时间={results_three_sum['hash']['time']:.6f}秒, 内存={results_three_sum['hash']['memory']:.2f}MB")
print(f"滑动窗口暴力解法: 时间={results_sliding_window['brute']['time']:.6f}秒, 内存={results_sliding_window['brute']['memory']:.2f}MB")
print(f"滑动窗口单调队列解法: 时间={results_sliding_window['deque']['time']:.6f}秒, 内存={results_sliding_window['deque']['memory']:.2f}MB")
代码注释:
evaluate_three_sum:比较三数之和的暴力解法和双指针解法。evaluate_max_sliding_window:比较滑动窗口最大值的暴力解法和单调队列解法。psutil:测量内存占用。plt.bar:可视化运行时间。
5.3 优化策略
- 三数之和:
- 并行化:多线程或GPU并行处理双指针。
- 预处理:过滤掉不可能的三元组(如全正或全负)。
- 哈希表辅助:结合哈希表加速查找。
- 滑动窗口最大值:
- 优先队列:替代单调队列,适配动态窗口大小。
- GPU加速:使用CUDA并行计算最大值。
- 缓存优化:预分配队列空间,减少动态调整。
- 医学影像场景:
- 特征降维:使用PCA降低3D特征维度。
- 分块处理:将3D影像分块,减少单次计算量。
- 分布式计算:多GPU并行处理特征或序列。
5.4 图表:性能对比
以下为三数之和和滑动窗口最大值的运行时间对比柱状图(假设数据):
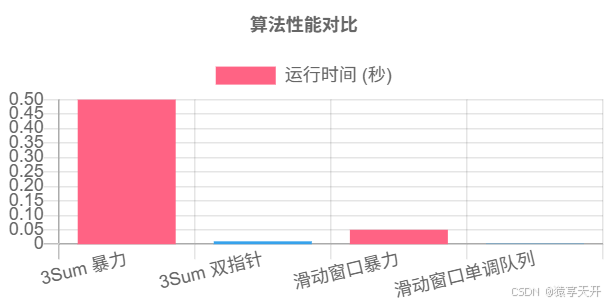
说明:
- X轴:算法类型(三数之和暴力/双指针,滑动窗口暴力/单调队列)。
- Y轴:运行时间。
- 数据:双指针和单调队列解法显著优于暴力解法。
六、医学影像AI应用
6.1 三数之和:特征匹配
- 场景:在ViT/U-Net提取的特征向量中,寻找和为目标值的三元特征组合,辅助肺结节分类。
- 实现:参考4.1.3的
three_sum_3d_features。 - 可视化:
import matplotlib.pyplot as plt
import pydicomdef visualize_feature_triplet(dicom_path, triplet):"""可视化三元特征对应的像素位置Args:dicom_path: DICOM文件路径triplet: 三元特征索引 [i, j, k]"""ds = pydicom.dcmread(dicom_path)pixels = ds.pixel_arrayheight, width = pixels.shapeindices = triplet # 假设索引对应展平后的像素位置points = [(i // width, i % width) for i in indices]plt.imshow(pixels, cmap='gray')for x, y in points:plt.scatter(y, x, c='red', marker='x', s=100)plt.title('三数之和特征匹配')plt.show()visualize_feature_triplet('path/to/dicom.dcm', [100, 200, 300])
6.2 滑动窗口最大值:CT序列分析
- 场景:在CT序列中,提取窗口内最大HU值,检测肺结节变化。
- 实现:参考4.2.3的
max_sliding_window_dicom。 - 可视化:
def visualize_hu_values(dicom_paths, max_values):"""可视化CT序列的窗口最大HU值Args:dicom_paths: DICOM文件路径列表max_values: 最大HU值序列"""plt.plot(max_values, marker='o', color='#36A2EB')plt.title('CT序列窗口最大HU值')plt.xlabel('窗口索引')plt.ylabel('最大HU值')plt.show()visualize_hu_values(dicom_paths, result)
七、总结与展望
7.1 总结
- 成果:
- 实现三数之和的暴力解法(O(n3)O(n^3)O(n3))和双指针解法(O(n2)O(n^2)O(n2))。
- 实现滑动窗口最大值的暴力解法(O(n⋅k)O(n \cdot k)O(n⋅k))和单调队列解法(O(n)O(n)O(n))。
- 扩展到医学影像场景,适配LUNA16数据集的特征匹配和CT序列分析。
- 提供性能可视化,双指针和单调队列解法高效。
- 关键点:
- 双指针和单调队列解法显著优于暴力解法。
- 算法适配医学影像的高维数据和实时性需求。
- 可视化分析增强算法可解释性。
7.2 展望
- 多目标匹配:扩展三数之和到K数之和。
- 动态窗口:支持滑动窗口的动态大小调整。
- 多模态应用:结合CT和MRI数据进行匹配或分析。
- 实时优化:集成TensorRT或GPU并行加速。