线性代数基础 | 零空间 / 行空间 / 列空间 / 左零空间 / 线性无关 / 齐次 / 非齐次
注:本文为 “线性代数 | 空间 / 齐次性” 相关合辑。
图片清晰度受引文原图所限。
略作重排,未全校去重。
如有内容异常,请看原文。
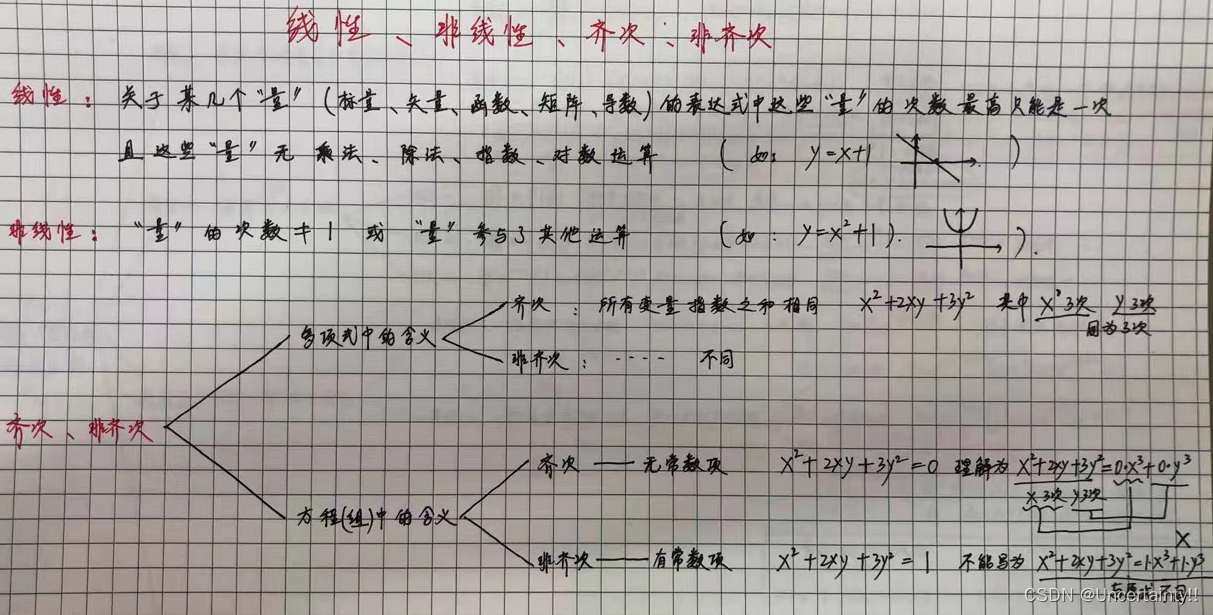
线性、非线性、齐次与非齐次的概念辨析
Mr DaYang 于 2020-05-04 13:03:28 发布
一、概念界定
在数学(尤其是代数、微分方程等领域)中,“线性”“非线性”“齐次”“非齐次”是描述表达式或方程结构的基础术语,其定义需结合数学语境精准理解,避免歧义。
1. 齐次性(Homogeneity)
“齐次性”源于英文“Homogeneity”,其含义为:用于描述一组具有相同“成员(member)或部分(part)”属性的事物。核心内涵是 “属性的一致性”——即一组对象(如多项式的项、方程的两边)在某一特定属性上满足统一标准。在数学中,这一“特定属性”通常指向“次数的统一性”(如多项式各项的次数相同、方程两边的次数相等),是后续判定“齐次多项式”“齐次方程”的核心依据。
例如:若多项式中所有项的“变量指数之和”(即项的次数)完全相同,则该多项式满足“齐次性”,可称为齐次多项式。
2. 线性(Linearity)
从代数本质来看,“线性”的核心是 “一次性与可分离性”,需同时满足两个条件:
- 次数条件:表达式中涉及的“量”(包括标量、矢量、函数、矩阵、导数等)的最高次数为 1;
- 运算条件:“量”之间不包含乘法、除法、指数、对数、三角函数等非线性运算(即“量”需保持“独立分离”状态,无交叉作用)。
从几何意义来看,二维平面中“线性表达式”对应的图像是直线,这也是“线性”名称的直观来源。
3. 齐次(Homogeneous)
在方程或多项式的语境中,“齐次”是“齐次性”的具体体现,核心特征是 “无独立常数项,且各部分次数统一”。
需注意:“无独立常数项”并非单纯指“不含常数”,而是指表达式中不存在“次数为 0 的独立项”(常数项的次数为 0),且所有含变量的项需满足次数一致(后续结合实例详解)。
二、线性与非线性的判定方法
判定的核心是观察表达式中“量”的次数及运算类型,具体可分为以下两类:
(一)线性的判定
满足“线性定义”中“次数为 1”且“无非线性运算”的表达式,即为线性表达式。
1. 代数示例
平面直角坐标系中的直线方程均为线性表达式,例如:
y=x+1y = x + 1y=x+1
- 分析:变量 xxx 的次数为 1,变量 yyy 的次数为 1;表达式中仅包含加法和乘法(系数与变量的乘法),无乘法(变量间)、指数、对数等运算,符合线性定义。
2. 扩展示例(多变量/函数)
- 多变量线性表达式:z=2x+3yz = 2x + 3yz=2x+3y(x,y,zx,y,zx,y,z 均为一次,无变量间运算);
- 线性函数关系:f(x)=3x−2f(x) = 3x - 2f(x)=3x−2(函数值与自变量为一次关系,无非线性运算)。
(二)非线性的判定
若表达式不满足“线性”的任一条件(即“量的次数≠1”,或“量参与非线性运算”),则为非线性表达式。
1. 代数示例
- 二次函数(次数≠1):y=x2+1y = x^2 + 1y=x2+1
分析:变量 xxx 的次数为 2,不符合“最高次数为 1”的条件,故为非线性; - 指数函数(非线性运算):y=2x+3y = 2^x + 3y=2x+3
分析:自变量 xxx 参与指数运算(非线性运算),即使次数看似“1”,仍为非线性; - 变量间乘法(非线性运算):z=xy+xz = xy + xz=xy+x
分析:包含变量 xxx 与 yyy 的乘法运算(非线性运算),故为非线性。
2. 几何特征
非线性表达式对应的图像通常为曲线(如二次函数对应抛物线、指数函数对应指数曲线),这与线性表达式的“直线”特征形成鲜明对比。
三、齐次与非齐次的判定方法
判定的核心是“多项式次数的统一性”与“是否含独立常数项”,需先明确多项式次数的定义:
多项式中某一项的次数 = 该项所有变量的指数之和;多项式的次数 = 各项次数中的最大值(但齐次多项式需所有项次数相同)。
(一)齐次的判定
“齐次”的核心是“无独立常数项,且各部分次数统一”,具体可分为“齐次多项式”与“齐次方程组”两类:
1. 齐次多项式的判定
满足“所有项的次数完全相同”的多项式,即为齐次多项式(无独立常数项,因常数项次数为 0,无法与其他项的次数统一)。
示例1:二元二次齐次多项式
x2+2xy+3y2x^2 + 2xy + 3y^2x2+2xy+3y2
逐项分析次数:
- x2x^2x2:变量 xxx 指数为 2,yyy 指数为 0,次数 = 2 + 0 = 2;
- 2xy2xy2xy:变量 xxx 指数为 1,yyy 指数为 1,次数 = 1 + 1 = 2;
- 3y23y^23y2:变量 xxx 指数为 0,yyy 指数为 2,次数 = 0 + 2 = 2;
结论:所有项次数均为 2,无独立常数项,故为齐次多项式(次数为 2 的齐次多项式)。
示例 2:三元五次齐次多项式
a2b3+a4ba^2b^3 + a^4ba2b3+a4b
逐项分析次数(变量为 a,ba,ba,b,默认其他字母为常数):
- a2b3a^2b^3a2b3:aaa 指数为 2,bbb 指数为 3,次数 = 2 + 3 = 5;
- a4ba^4ba4b:aaa 指数为 4,bbb 指数为 1,次数 = 4 + 1 = 5;
结论:所有项次数均为 5,无独立常数项,故为齐次多项式(次数为 5 的齐次多项式)。
2. 齐次方程组的判定
满足“方程两边各项次数均相等”的方程组,即为齐次方程组。需特别注意:
常数“0”可视为任意次数(因 0=0⋅x0=0⋅x1=0⋅x2=…0 = 0 \cdot x^0 = 0 \cdot x^1 = 0 \cdot x^2 = \dots0=0⋅x0=0⋅x1=0⋅x2=…),因此“0”能与方程左边任意次数的项匹配,使两边次数统一。
示例:二元二次齐次方程
x2+2xy+3y2=0x^2 + 2xy + 3y^2 = 0x2+2xy+3y2=0
分析:
- 左边:齐次多项式,各项次数均为 2;
- 右边:常数“0”,可视为次数 2(与左边次数统一);
- 无独立常数项(右边“0”非独立常数项,而是次数适配项);
结论:方程两边次数相等,无独立常数项,故为齐次方程。
(二)非齐次的判定
“非齐次”的核心是“存在独立常数项,或方程两边次数不统一”,最典型的形式是“非齐次方程组”(非齐次多项式因含独立常数项,已不满足“齐次性”,故通常不单独定义“非齐次多项式”,而是通过方程组体现)。
示例:二元二次非齐次方程
x2+2xy+3y2=1x^2 + 2xy + 3y^2 = 1x2+2xy+3y2=1
分析:
- 左边:齐次多项式,各项次数均为 2;
- 右边:独立常数项“1”(次数为 0,与左边次数 2 不统一);
- 存在独立常数项“1”,破坏了“次数统一性”;
结论:方程两边次数不相等,含独立常数项,故为非齐次方程。
扩展说明
非齐次方程的本质是“齐次方程加独立常数项”,例如上述方程可改写为:
(x2+2xy+3y2)−1=0(x^2 + 2xy + 3y^2) - 1 = 0(x2+2xy+3y2)−1=0
其中“x2+2xy+3y2x^2 + 2xy + 3y^2x2+2xy+3y2”是齐次部分,“−1-1−1”是独立常数项(非齐次部分),二者结合构成非齐次方程。
四、明确“线性”与“齐次”的本质区别
| 对比维度 | 线性(Linearity) | 齐次(Homogeneity) |
|---|---|---|
| 核心判定标准 | 次数为 1 + 无非线性运算 | 无独立常数项 + 各部分次数统一 |
| 关注重点 | “量”的运算类型与次数限制 | “项”的次数统一性与常数项存在性 |
| 典型示例 | y=2x+3y = 2x + 3y=2x+3(线性,非齐次) | x2+xy=0x^2 + xy = 0x2+xy=0(齐次,非线性) |
| 关联关系 | 线性表达式可能是齐次或非齐次 | 齐次表达式可能是线性或非线性 |
例如:
- 线性齐次表达式:y=3xy = 3xy=3x(次数 1,无非线性运算;无常数项,次数统一);
- 线性非齐次表达式:y=3x+2y = 3x + 2y=3x+2(次数 1,无非线性运算;含常数项,次数不统一);
- 非线性齐次表达式:x2+y2=0x^2 + y^2 = 0x2+y2=0(次数 2,非线性;无常数项,次数统一);
- 非线性非齐次表达式:x2+y2=4x^2 + y^2 = 4x2+y2=4(次数 2,非线性;含常数项,次数不统一)。
从线性代数角度图解:通解、特解、非齐次通解、非齐次特解、齐次通解、齐次特解
Uncertainty!! 已于 2022-08-30 22:02:06 修改
声明:本文为笔者研读《Introduction to Linear Algebra》后,对相关内容形成的个人理解。
一、明确齐次与非齐次方程组的概念
齐次与非齐次方程组的定义
二、实例分析:求解线性方程组
为直观阐释上述概念,首先通过一个具体线性方程组的求解过程展开分析,后续将基于该实例进行图解说明。
待求解方程组如下:

(一)构建方程组的增广矩阵
该线性方程组的增广矩阵形式为:

三、非齐次方程组的特解(xp\boldsymbol{x}_pxp,Particular Solution)
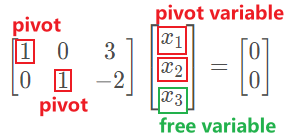
非齐次线性方程组的标准形式为 Rx=d\boldsymbol{R}\boldsymbol{x} = \boldsymbol{d}Rx=d,对应本例的矩阵形式为:
[10301−2][x1x2x3]=[21]\begin{bmatrix} 1 & 0 & 3 \\ 0 & 1 & -2 \end{bmatrix} \begin{bmatrix} x_1 \\ x_2 \\ x_3 \end{bmatrix} = \begin{bmatrix} 2 \\ 1 \end{bmatrix} [10013−2]x1x2x3=[21]
1. 特解的求解
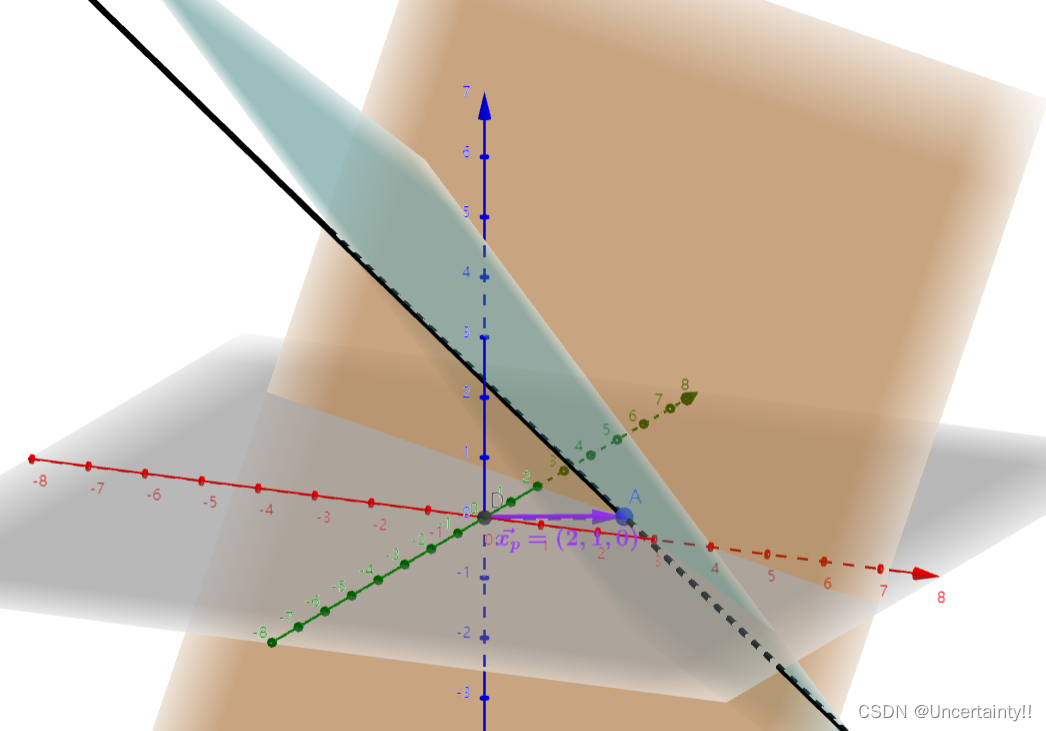
选取自由变量 x3=0x_3 = 0x3=0(自由变量的取值可任意,此处为简化计算选取 000),代入方程组可得:
[10301−2][210]=[21]\begin{bmatrix} 1 & 0 & 3 \\ 0 & 1 & -2 \end{bmatrix} \begin{bmatrix} 2 \\ 1 \\ 0 \end{bmatrix} = \begin{bmatrix} 2 \\ 1 \end{bmatrix} [10013−2]210=[21]
因此,该非齐次方程组的一个特解为:
xp=[210]\boldsymbol{x}_p = \begin{bmatrix} 2 \\ 1 \\ 0 \end{bmatrix} xp=210
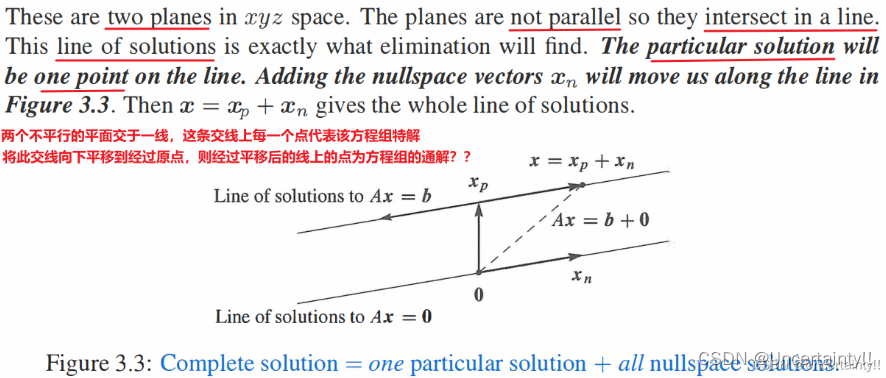
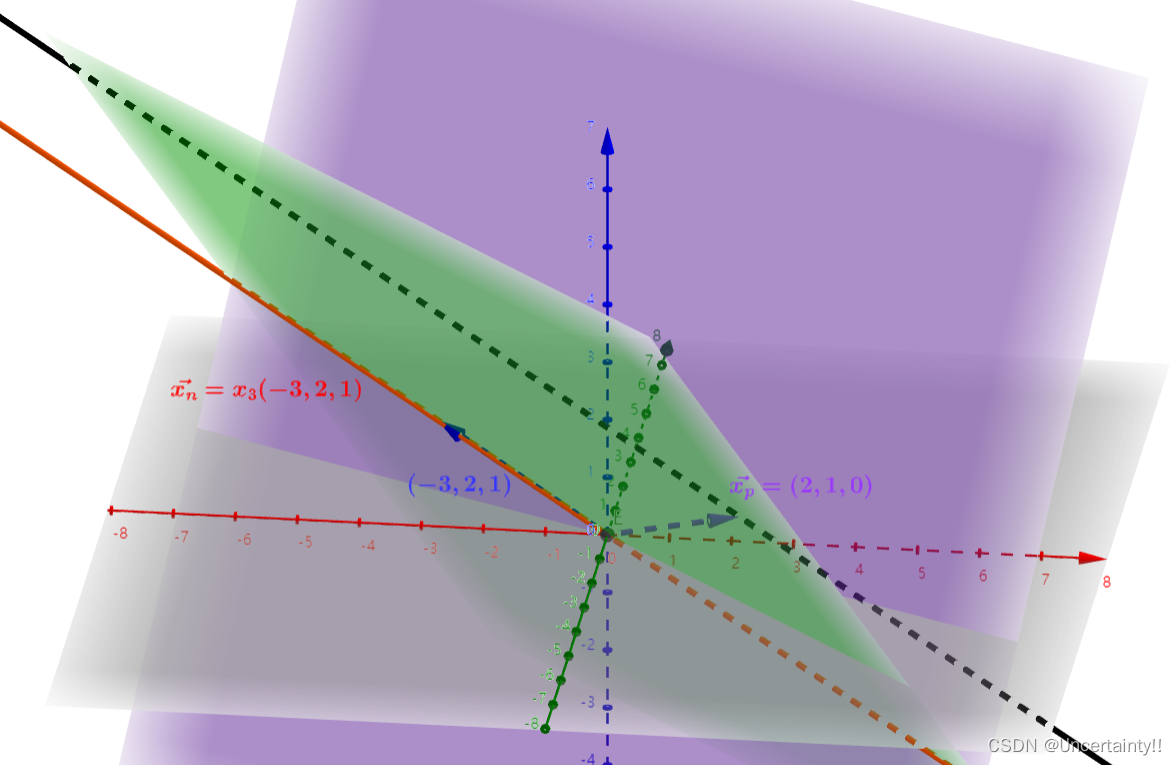
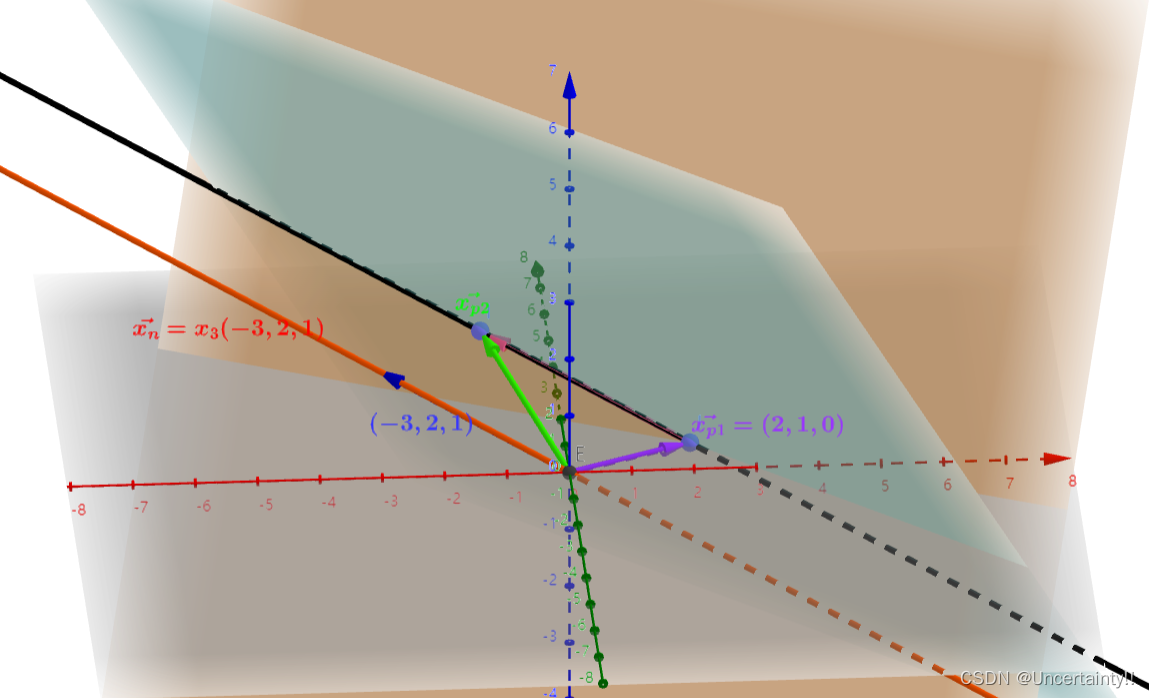
2. 特解的几何意义
从几何角度看,非齐次线性方程组 Rx=d\boldsymbol{R}\boldsymbol{x} = \boldsymbol{d}Rx=d 对应三维空间中两个平面的交线,而特解 xp\boldsymbol{x}_pxp 是该交线上的任意一个具体点。
四、齐次方程组的基础解系(xn\boldsymbol{x}_nxn,Special Solution,对应零空间解)
齐次线性方程组的标准形式为 Rx=0\boldsymbol{R}\boldsymbol{x} = \boldsymbol{0}Rx=0,对应本例的矩阵形式为:
[10301−2][x1x2x3]=[00]\begin{bmatrix} 1 & 0 & 3 \\ 0 & 1 & -2 \end{bmatrix} \begin{bmatrix} x_1 \\ x_2 \\ x_3 \end{bmatrix} = \begin{bmatrix} 0 \\ 0 \end{bmatrix} [10013−2]x1x2x3=[00]
1. 基础解系的求解
将矩阵形式转化为代数方程组:
{x1+3x3=0x2−2x3=0\begin{cases} x_1 + 3x_3 = 0 \\ x_2 - 2x_3 = 0 \end{cases} {x1+3x3=0x2−2x3=0
将主元变量(x1,x2x_1, x_2x1,x2)移至等号左侧,自由变量(x3x_3x3)移至等号右侧,可得:
x1=−3x3,x2=2x3x_1 = -3x_3, \quad x_2 = 2x_3 x1=−3x3,x2=2x3
令自由变量 x3=tx_3 = tx3=t(ttt 为任意常数),则方程组的解可表示为:
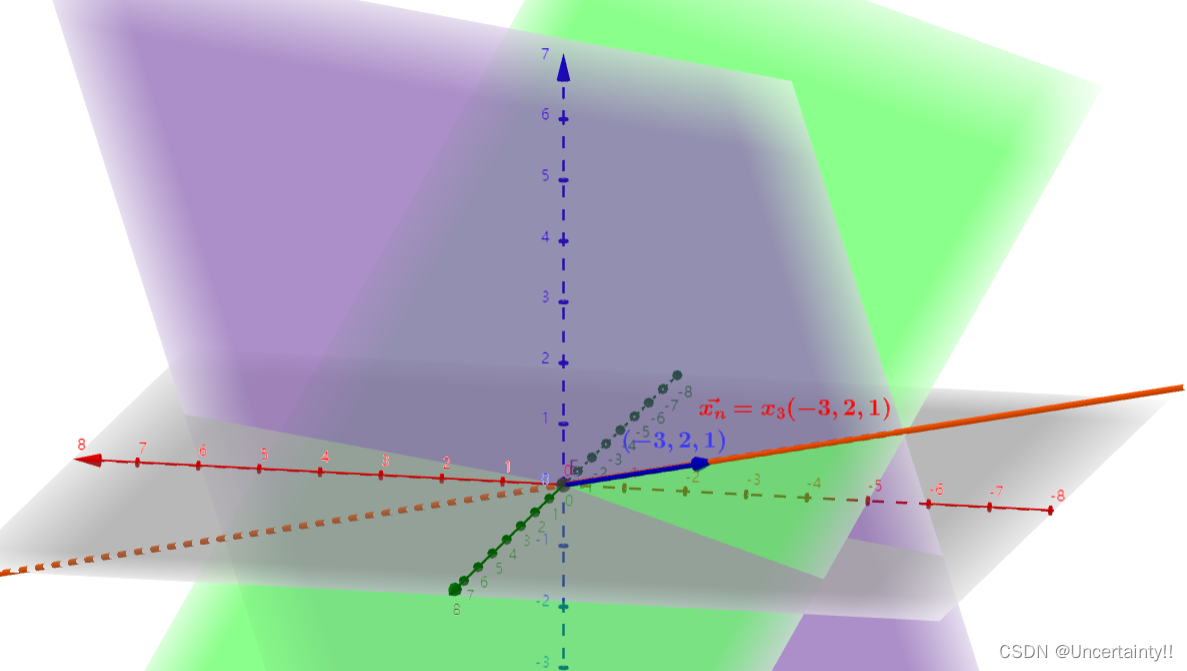
[x1x2x3]=t[−321]\begin{bmatrix} x_1 \\ x_2 \\ x_3 \end{bmatrix} = t \begin{bmatrix} -3 \\ 2 \\ 1 \end{bmatrix} x1x2x3=t−321
因此,齐次方程组的基础解系(即零空间中的解向量)为:
xn=t[−321]\boldsymbol{x}_n = t \begin{bmatrix} -3 \\ 2 \\ 1 \end{bmatrix} xn=t−321
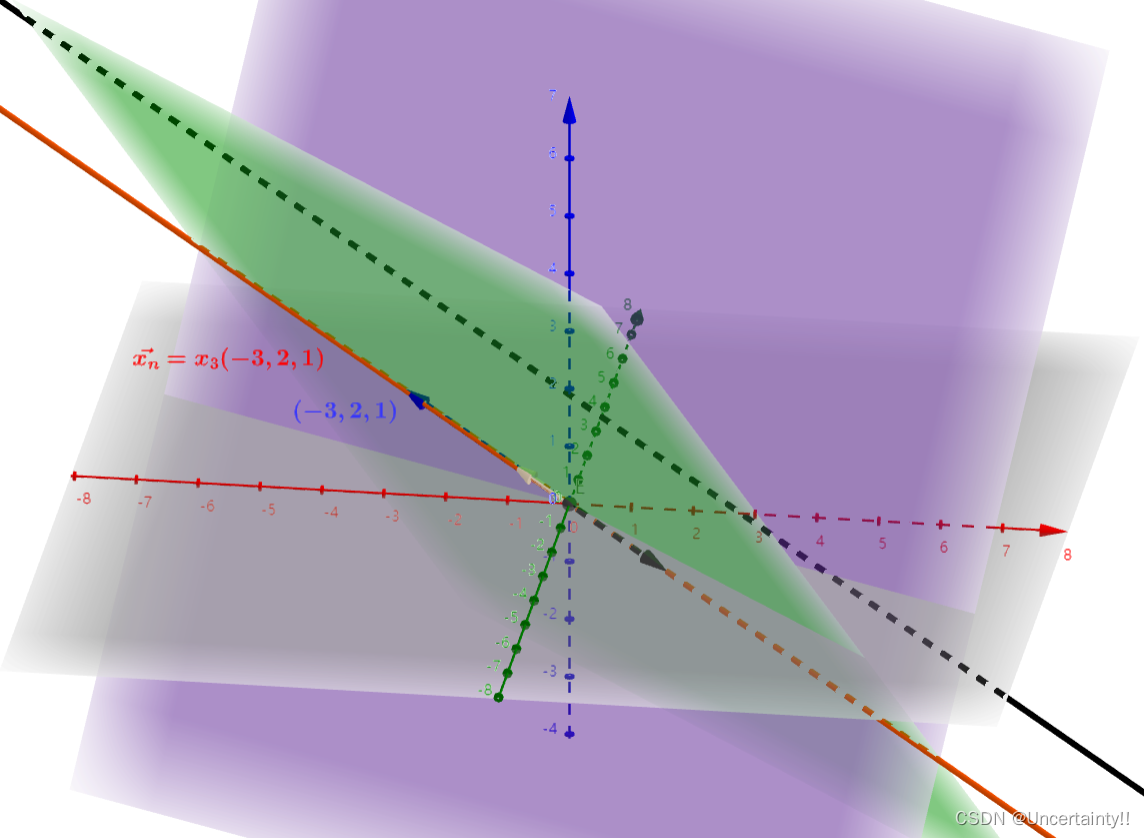
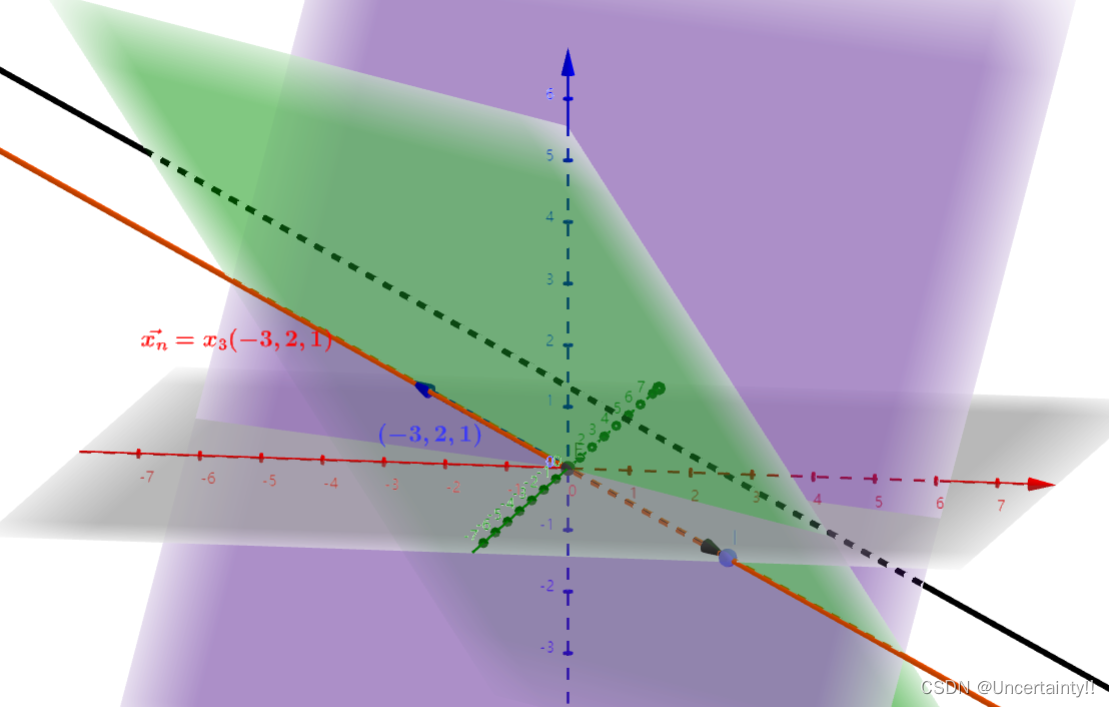
2. 基础解系的几何意义
齐次线性方程组 Rx=0\boldsymbol{R}\boldsymbol{x} = \boldsymbol{0}Rx=0 对应三维空间中过原点的两个平面的交线,而基础解系 xn\boldsymbol{x}_nxn 是该交线上所有点对应的向量(由自由变量的取值决定向量的缩放)。
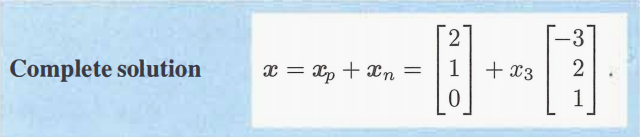
五、非齐次方程组的通解(Complete Solution)
1. 通解的构成
线性代数中,非齐次线性方程组 Rx=d\boldsymbol{R}\boldsymbol{x} = \boldsymbol{d}Rx=d 的通解由两部分构成:
非齐次方程组的通解 = 齐次方程组的通解 + 非齐次方程组的一个特解
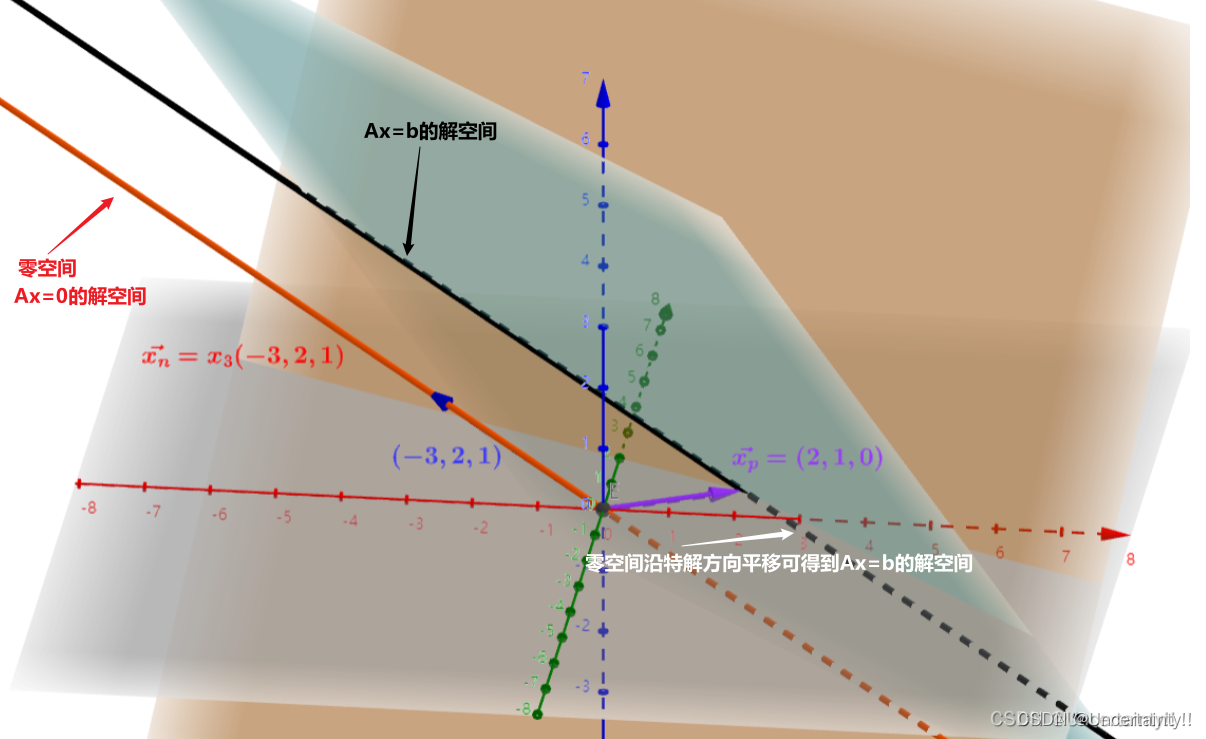
结合本例,齐次方程组的通解为 xn=t[−321]\boldsymbol{x}_n = t \begin{bmatrix} -3 \\ 2 \\ 1 \end{bmatrix}xn=t−321(ttt 为任意常数),非齐次方程组的一个特解为 xp=[210]\boldsymbol{x}_p = \begin{bmatrix} 2 \\ 1 \\ 0 \end{bmatrix}xp=210,因此非齐次方程组的通解为:
x通解=xp+xn=[210]+t[−321]\boldsymbol{x}_{\text{通解}} = \boldsymbol{x}_p + \boldsymbol{x}_n = \begin{bmatrix} 2 \\ 1 \\ 0 \end{bmatrix} + t \begin{bmatrix} -3 \\ 2 \\ 1 \end{bmatrix} x通解=xp+xn=210+t−321
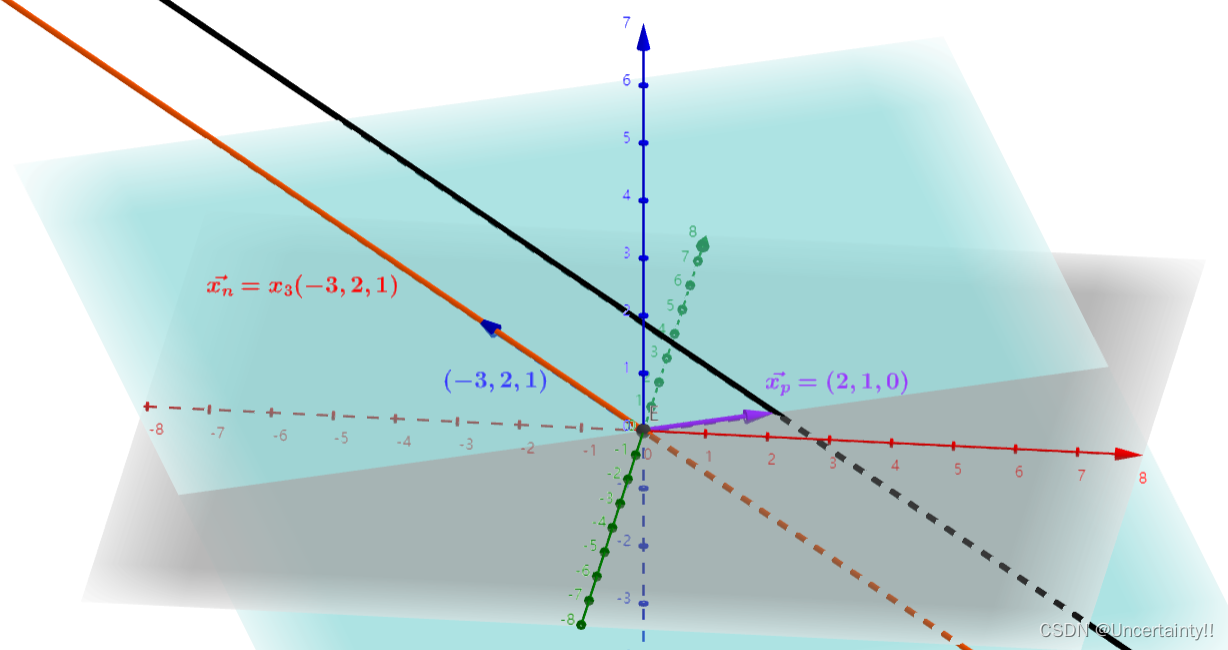
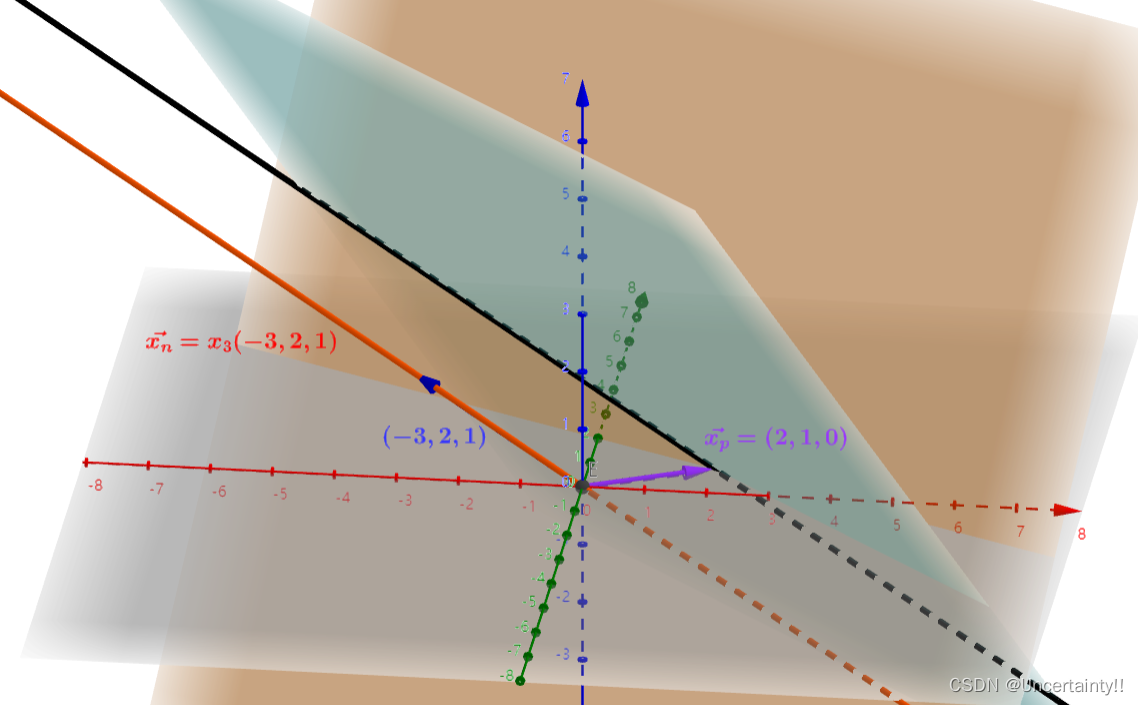
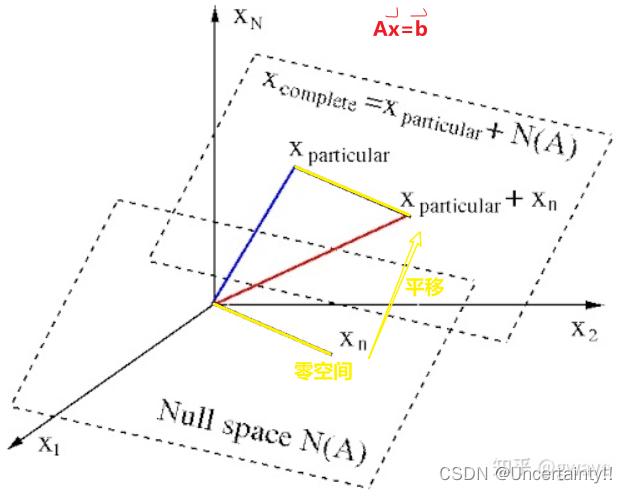
2. 通解的几何意义
从几何角度看,非齐次方程组的通解对应两个平面交线上的所有点——即通过特解 xp\boldsymbol{x}_pxp 对应的点,沿齐次方程组解空间(过原点的直线)方向平移得到的所有点。
六、概念关系图解与证明
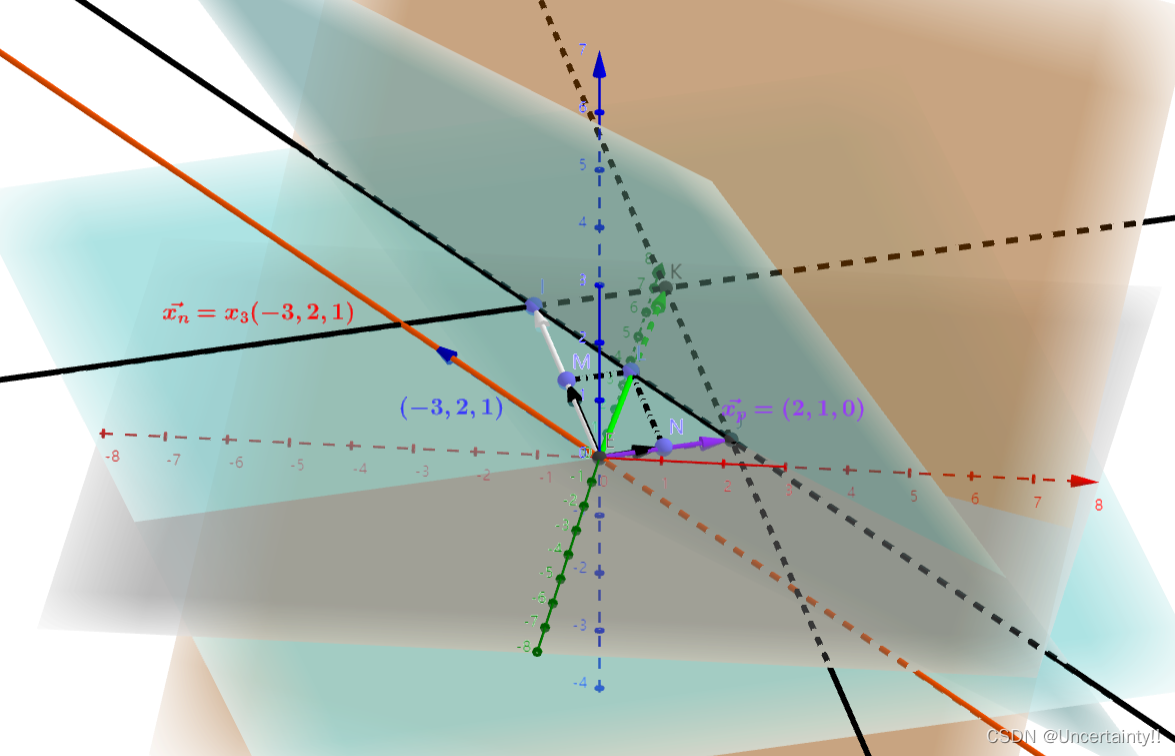
为进一步明确通解、特解、非齐次通解、非齐次特解、齐次通解、齐次特解的内在联系,结合本例的几何意义展开如下分析(向量起点均为原点,终点为对应直线上的点):
(一)非齐次通解与齐次通解、非齐次特解的关系
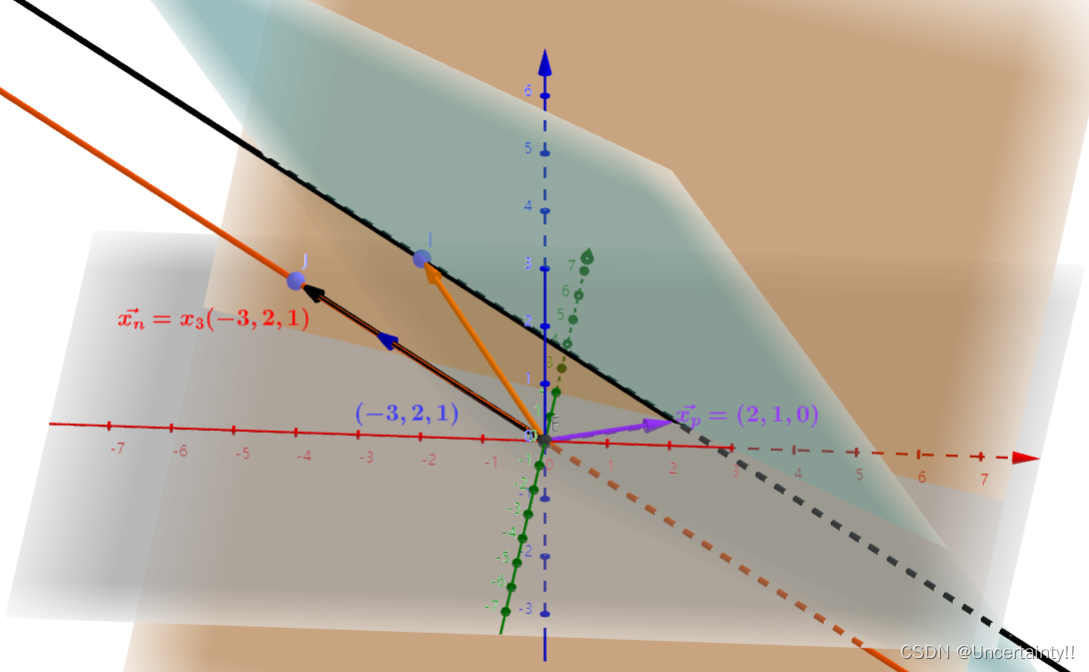
结论:非齐次通解 = 齐次通解 + 非齐次特解**
几何上,齐次通解对应过原点的直线(红线上所有向量,如蓝色向量),非齐次特解对应非齐次解直线上的一个固定点(如紫色向量)。通过“非齐次特解向量 + 齐次通解中任意向量”的线性组合,可得到非齐次解直线上所有点对应的向量(黑线上所有点),即非齐次通解。
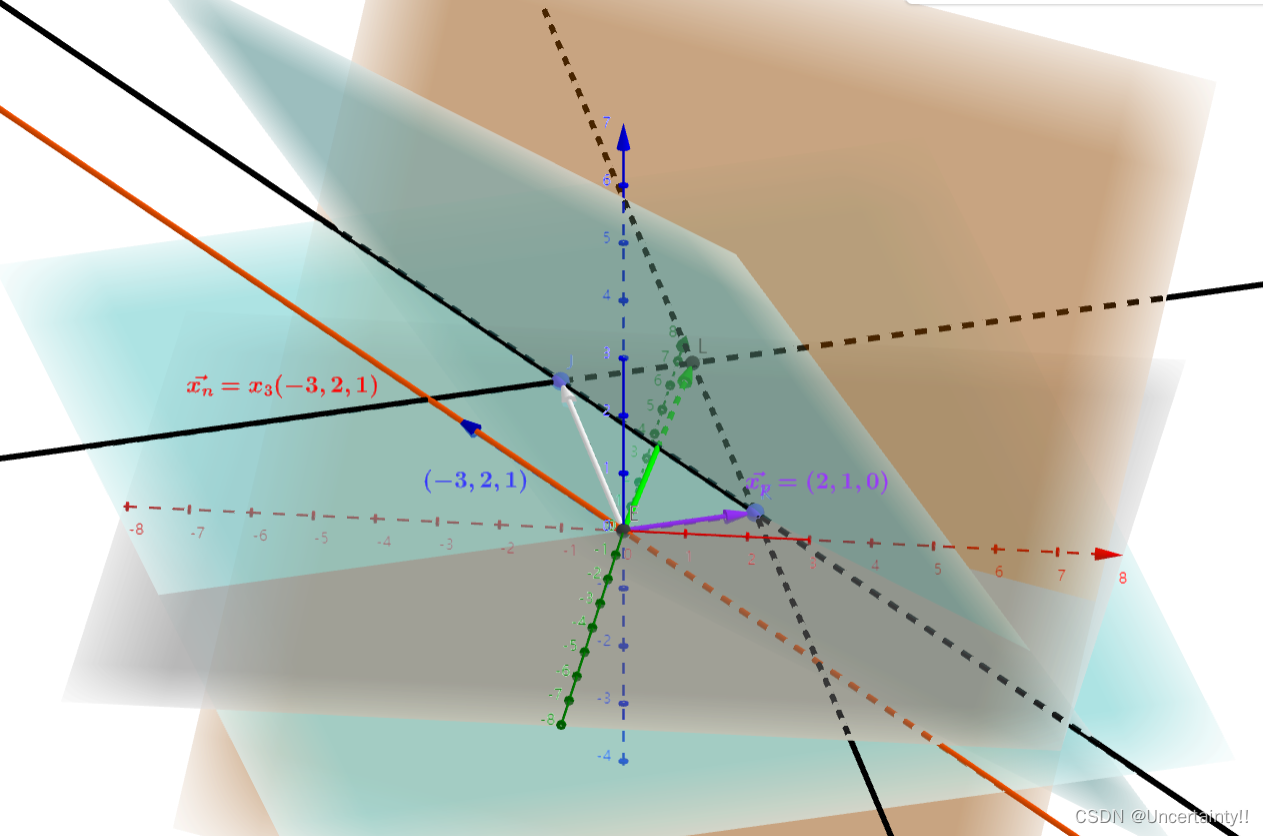
(二)齐次通解与齐次特解的关系
结论 1:齐次通解 = 任意常数 × 齐次特解**
齐次特解是齐次方程组的任意一个非零解(如蓝色向量),通过对该特解进行任意缩放(乘以任意常数),可得到齐次解直线上的所有向量(红线上所有点),即齐次通解。
结论 2:两个齐次特解的差仍为齐次特解**
设 y1∗,y2∗\boldsymbol{y}_1^*, \boldsymbol{y}_2^*y1∗,y2∗ 为齐次方程组 Rx=0\boldsymbol{R}\boldsymbol{x} = \boldsymbol{0}Rx=0 的两个特解,则:
R(y1∗−y2∗)=Ry1∗−Ry2∗=0−0=0\boldsymbol{R}(\boldsymbol{y}_1^* - \boldsymbol{y}_2^*) = \boldsymbol{R}\boldsymbol{y}_1^* - \boldsymbol{R}\boldsymbol{y}_2^* = \boldsymbol{0} - \boldsymbol{0} = \boldsymbol{0} R(y1∗−y2∗)=Ry1∗−Ry2∗=0−0=0
因此,y1∗−y2∗\boldsymbol{y}_1^* - \boldsymbol{y}_2^*y1∗−y2∗ 仍为齐次方程组的特解(如图中白色向量 = 蓝色向量 - 黑色向量)。
推论:若 y=ay1∗−by2∗\boldsymbol{y} = a\boldsymbol{y}_1^* - b\boldsymbol{y}_2^*y=ay1∗−by2∗ 为齐次特解,则 a−b=0a - b = 0a−b=0
由于 y\boldsymbol{y}y 需满足 Ry=0\boldsymbol{R}\boldsymbol{y} = \boldsymbol{0}Ry=0,代入得:
R(ay1∗−by2∗)=aRy1∗−bRy2∗=0\boldsymbol{R}(a\boldsymbol{y}_1^* - b\boldsymbol{y}_2^*) = a\boldsymbol{R}\boldsymbol{y}_1^* - b\boldsymbol{R}\boldsymbol{y}_2^* = 0 R(ay1∗−by2∗)=aRy1∗−bRy2∗=0
因 Ry1∗=Ry2∗=0\boldsymbol{R}\boldsymbol{y}_1^* = \boldsymbol{R}\boldsymbol{y}_2^* = \boldsymbol{0}Ry1∗=Ry2∗=0,该式恒成立,但从解的线性相关性可知,只有当系数满足 a−b=0a - b = 0a−b=0 时,y\boldsymbol{y}y 才是齐次解空间中的有效向量(避免重复或冗余)。
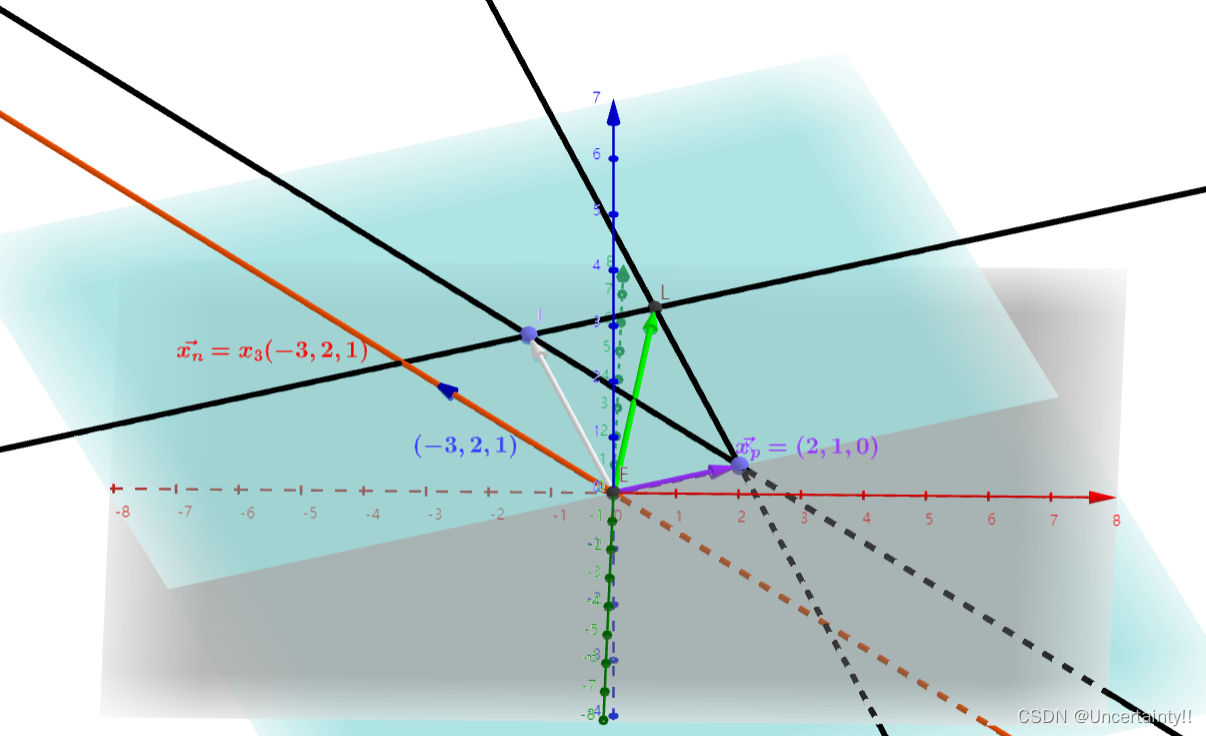
(三)非齐次特解与齐次特解的关系
结论 1:非齐次特解 + 确定常数 × 齐次特解 = 另一个非齐次特解**
设 xp\boldsymbol{x}_pxp 为非齐次方程组的特解,xn\boldsymbol{x}_nxn 为齐次方程组的特解,kkk 为确定常数,则:
R(xp+kxn)=Rxp+kRxn=d+k⋅0=d\boldsymbol{R}(\boldsymbol{x}_p + k\boldsymbol{x}_n) = \boldsymbol{R}\boldsymbol{x}_p + k\boldsymbol{R}\boldsymbol{x}_n = \boldsymbol{d} + k \cdot \boldsymbol{0} = \boldsymbol{d} R(xp+kxn)=Rxp+kRxn=d+k⋅0=d
因此,xp+kxn\boldsymbol{x}_p + k\boldsymbol{x}_nxp+kxn 仍为非齐次方程组的特解(如图中橙色向量 = 紫色向量 + 固定缩放后的蓝色向量)。
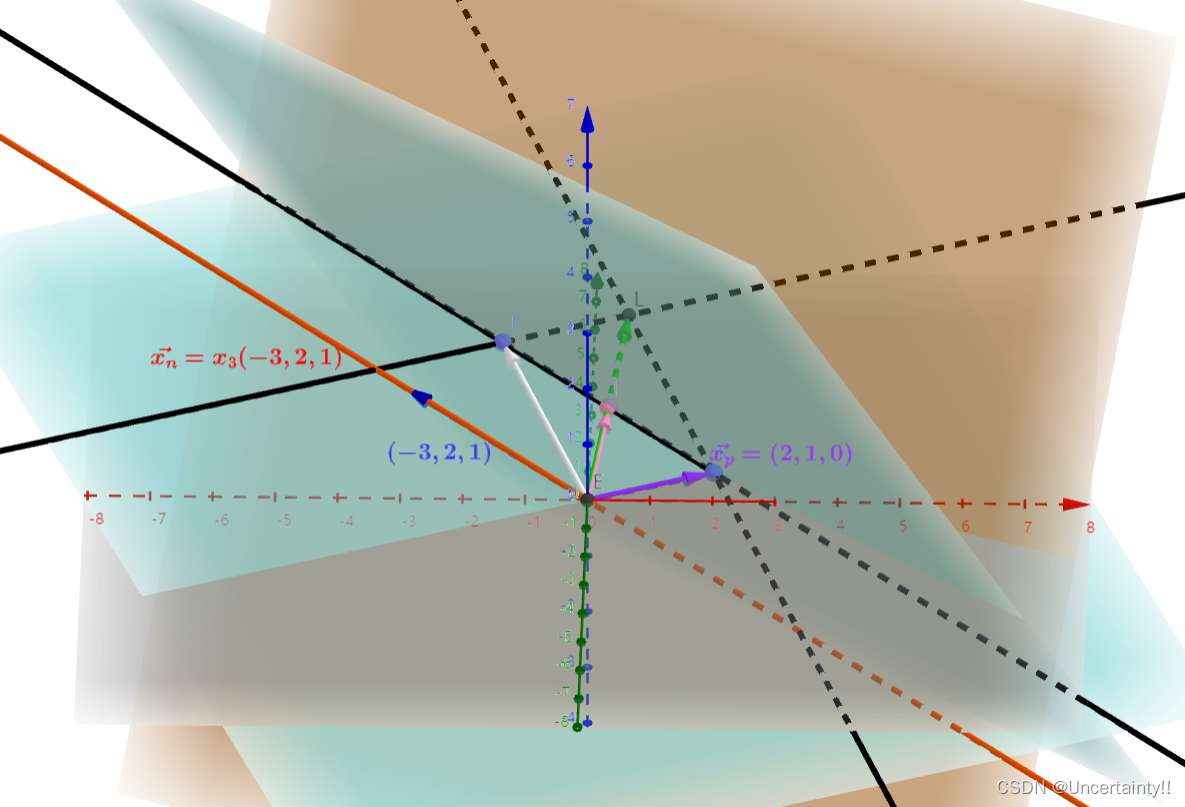
结论 2:两个非齐次特解的差为齐次特解**
设 xp1,xp2\boldsymbol{x}_{p1}, \boldsymbol{x}_{p2}xp1,xp2 为非齐次方程组 Rx=d\boldsymbol{R}\boldsymbol{x} = \boldsymbol{d}Rx=d 的两个特解,则:
R(xp1−xp2)=Rxp1−Rxp2=d−d=0\boldsymbol{R}(\boldsymbol{x}_{p1} - \boldsymbol{x}_{p2}) = \boldsymbol{R}\boldsymbol{x}_{p1} - \boldsymbol{R}\boldsymbol{x}_{p2} = \boldsymbol{d} - \boldsymbol{d} = \boldsymbol{0} R(xp1−xp2)=Rxp1−Rxp2=d−d=0
因此,xp1−xp2\boldsymbol{x}_{p1} - \boldsymbol{x}_{p2}xp1−xp2 为齐次方程组的特解(如图中粉色向量 = 绿色向量 - 紫色向量,且粉色向量与蓝色向量平行、模长相等)。
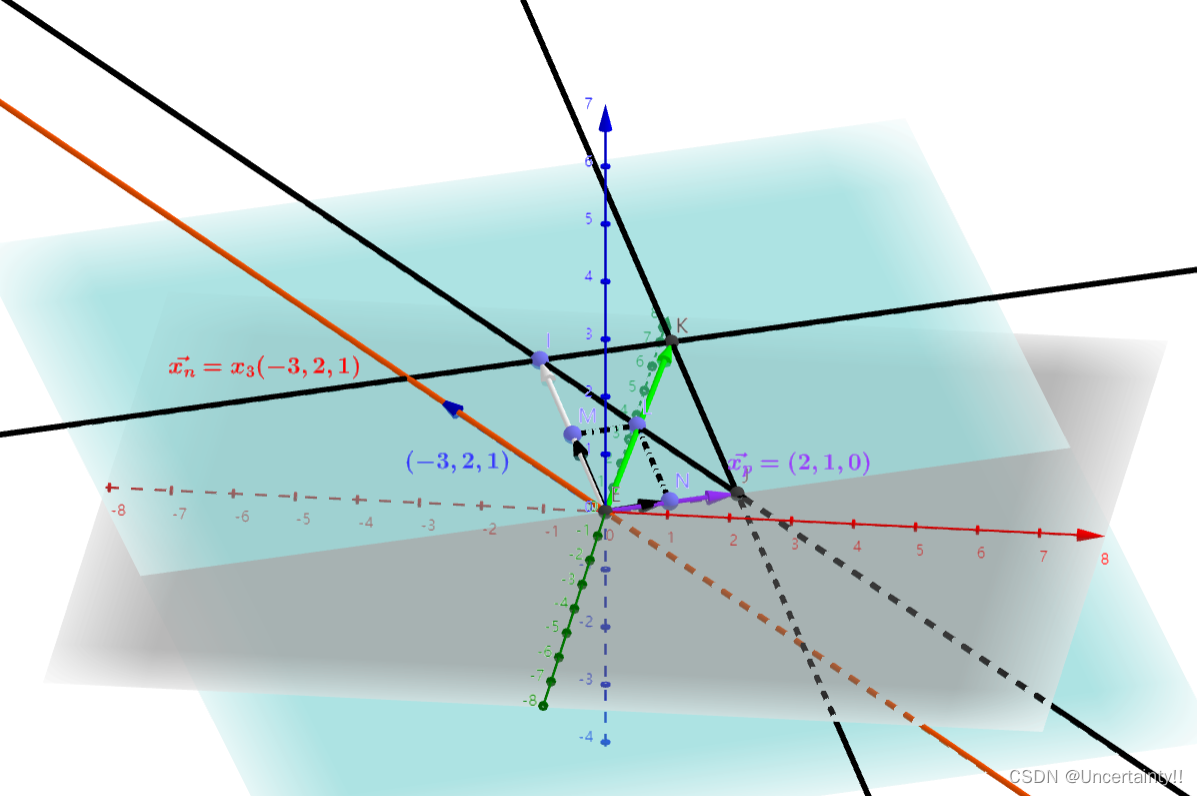
(四)非齐次特解的线性组合条件
问题:为何非齐次特解的线性组合系数和需为 1 时,才能得到另一个非齐次特解?**
1. 系数和不为 1 时的情况
设 xp1,xp2\boldsymbol{x}_{p1}, \boldsymbol{x}_{p2}xp1,xp2 为非齐次特解,线性组合为 y=axp1+bxp2\boldsymbol{y} = a\boldsymbol{x}_{p1} + b\boldsymbol{x}_{p2}y=axp1+bxp2(a+b≠1a + b \neq 1a+b=1),则:
Ry=aRxp1+bRxp2=ad+bd=(a+b)d\boldsymbol{R}\boldsymbol{y} = a\boldsymbol{R}\boldsymbol{x}_{p1} + b\boldsymbol{R}\boldsymbol{x}_{p2} = a\boldsymbol{d} + b\boldsymbol{d} = (a + b)\boldsymbol{d} Ry=aRxp1+bRxp2=ad+bd=(a+b)d
因 a+b≠1a + b \neq 1a+b=1,故 Ry=(a+b)d≠d\boldsymbol{R}\boldsymbol{y} = (a + b)\boldsymbol{d} \neq \boldsymbol{d}Ry=(a+b)d=d,即 y\boldsymbol{y}y 不满足非齐次方程组,其对应向量的终点不在非齐次解直线上(如图中绿色向量的终点不在黑线上)。
2. 系数和为 1 时的情况
当线性组合系数满足 a+b=1a + b = 1a+b=1 时,令 b=1−ab = 1 - ab=1−a,则:
y=axp1+(1−a)xp2=xp2+a(xp1−xp2)\boldsymbol{y} = a\boldsymbol{x}_{p1} + (1 - a)\boldsymbol{x}_{p2} = \boldsymbol{x}_{p2} + a(\boldsymbol{x}_{p1} - \boldsymbol{x}_{p2}) y=axp1+(1−a)xp2=xp2+a(xp1−xp2)
由前文结论可知,xp1−xp2\boldsymbol{x}_{p1} - \boldsymbol{x}_{p2}xp1−xp2 为齐次特解,因此:
Ry=Rxp2+aR(xp1−xp2)=d+a⋅0=d\boldsymbol{R}\boldsymbol{y} = \boldsymbol{R}\boldsymbol{x}_{p2} + a\boldsymbol{R}(\boldsymbol{x}_{p1} - \boldsymbol{x}_{p2}) = \boldsymbol{d} + a \cdot \boldsymbol{0} = \boldsymbol{d} Ry=Rxp2+aR(xp1−xp2)=d+a⋅0=d
此时 y\boldsymbol{y}y 满足非齐次方程组,其对应向量的终点在非齐次解直线上(如图中粉色向量的终点在黑线上)。
综上,若 y=axp1+bxp2\boldsymbol{y} = a\boldsymbol{x}_{p1} + b\boldsymbol{x}_{p2}y=axp1+bxp2 为非齐次特解,则必须满足 a+b=1a + b = 1a+b=1。
七、总结
线性方程组的解结构可通过“特解”与“通解”的关系统一表述,.png =700x)结论如下:
-
齐次方程组的通解由基础解系的所有线性组合构成,几何上对应过原点的直线(或平面、超平面);
-
非齐次方程组的通解由“齐次通解 + 非齐次特解”构成,几何上对应齐次解空间沿特解方向平移后的直线(或平面、超平面);
-
两个非齐次特解的差为齐次特解,两个齐次特解的线性组合仍为齐次特解;
-
非齐次特解的线性组合需满足系数和为 1,才能构成新的非齐次特解。
再理解:零空间、行空间、列空间、左零空间、基础解系、极大线性无关组、齐次解、非齐次解之间的关系
Uncertainty!! 已于 2024-12-05 17:05:54 修改
此文仅以方阵为例。
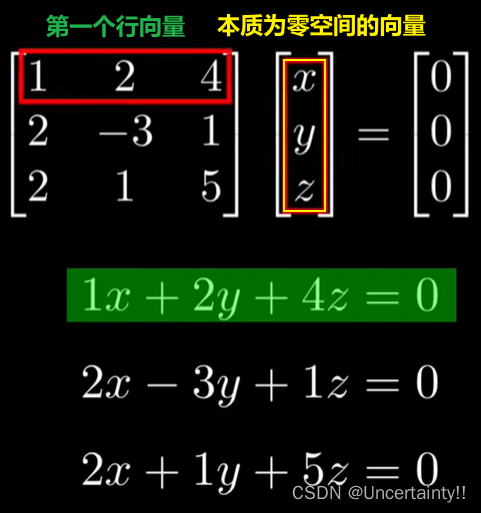
1 零空间(Null Space,N(A)N(A)N(A))
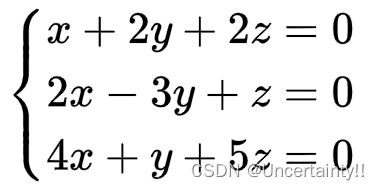
齐次线性方程组
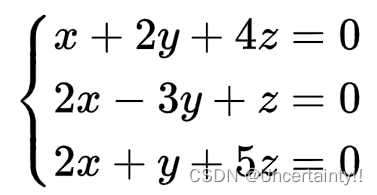
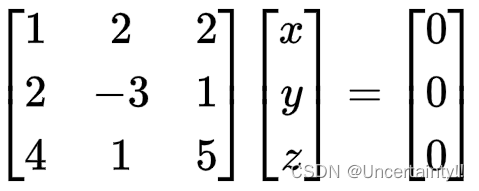
方程组的矩阵表示
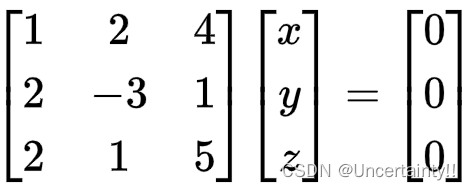
注意此矩阵为 AAA
Ax⃗=0⃗A \vec{x} = \vec{0}Ax=0
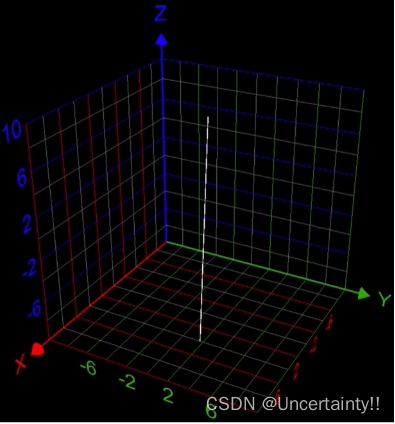
从方程组解的角度来看:
上述三个方程分别对应三个平面,三个平面交于一线,这条交线上的每个点 (x,y,z)(x,y,z)(x,y,z) 代入三个方程都会使得三个方程为 0,即交线上每个点均为三个方程的解,这些点(解)构成了矩阵 AAA 的零空间。
从线性变换的角度来看:
线性变换前的空间内所有点,在经过矩阵 AAA 的变换后,在上图交线中的所有点都被压缩到原点。
矩阵 AAA 的零空间
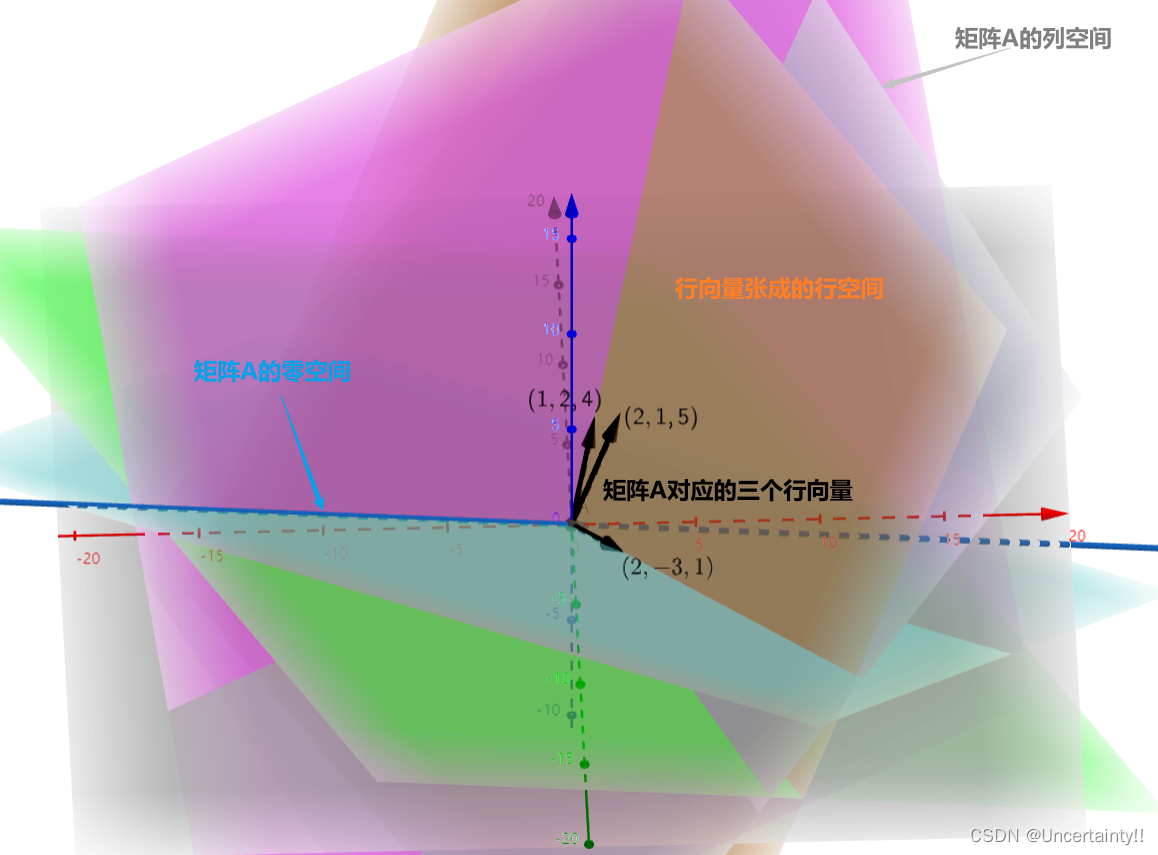
2 行空间(Row Space,C(AT)C(A^T)C(AT))
非齐次线性方程组
方程组的矩阵表示
注意此矩阵为 ATA^TAT
ATy⃗=b⃗A^T \vec{y} = \vec{b}ATy=b
将上式化为矩阵 AAA 乘以某个向量的形式:
ATy⃗=b⃗(ATy⃗)T=b⃗Ty⃗TA=b⃗T\begin{aligned} A^T \vec{y} &= \vec{b} \\ (A^T \vec{y})^T &= \vec{b}^T \\ \vec{y}^T A &= \vec{b}^T \end{aligned} ATy(ATy)TyTA=b=bT=bT
矩阵左乘向量
下面第一张图来自:矩阵乘法核心思想(2):行空间
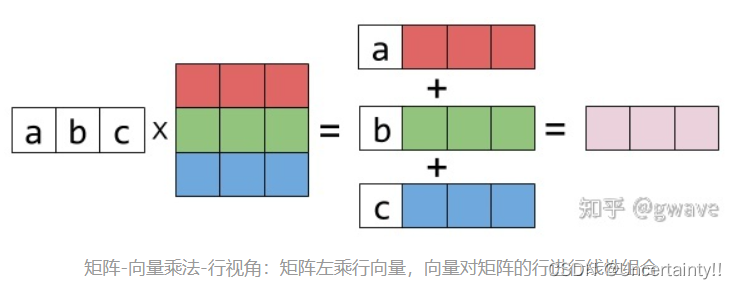
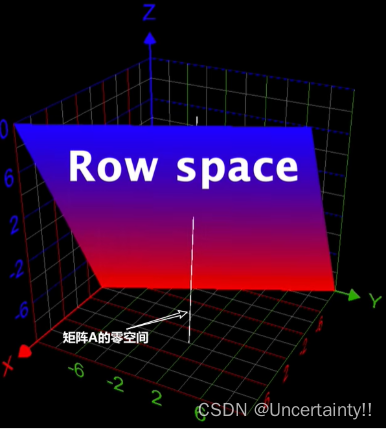
我们观察一下矩阵 AAA 的行向量与零空间中的向量之间的关系:
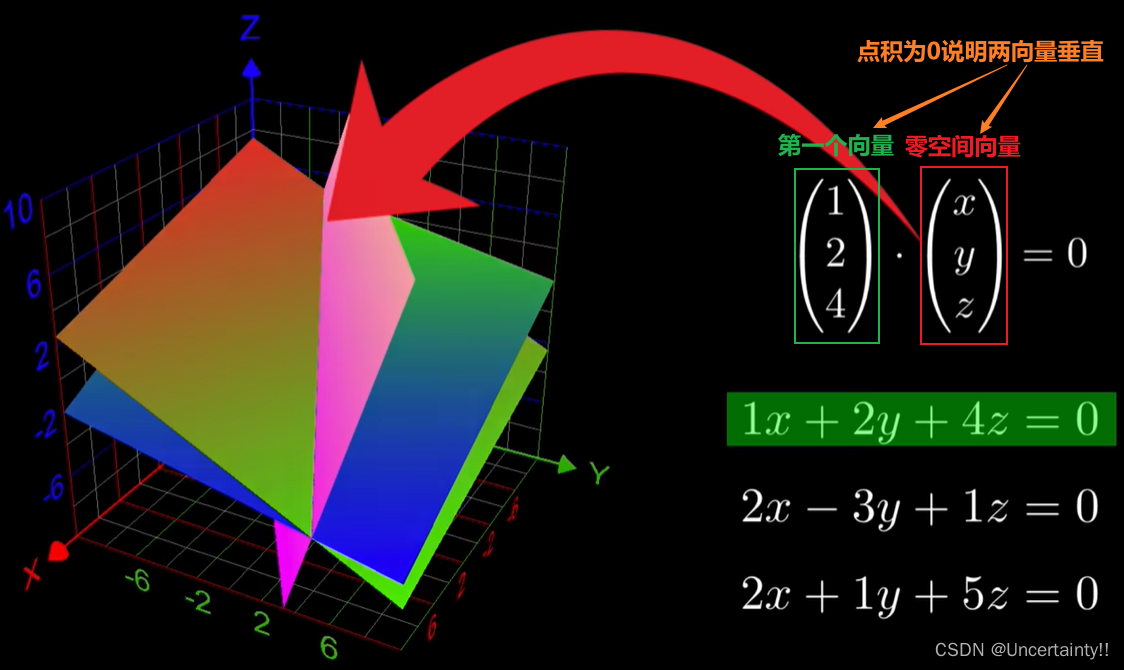
矩阵 AAA 的三个行向量张成行空间,白线为矩阵 AAA 的零空间,我们发现行空间 ⊥\perp⊥ 零空间。
3 零空间与行空间
零空间 ⊥\perp⊥ 行空间。
4 列空间(Column Space,C(A)C(A)C(A))
非齐次线性方程组
方程组的矩阵表示
注意此矩阵为 AAA
Ax⃗=b⃗A \vec{x} = \vec{b}Ax=b
矩阵右乘向量
下面第一张图来自:矩阵乘法核心思想(2):行空间
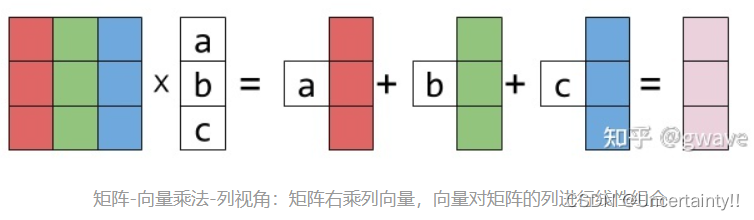
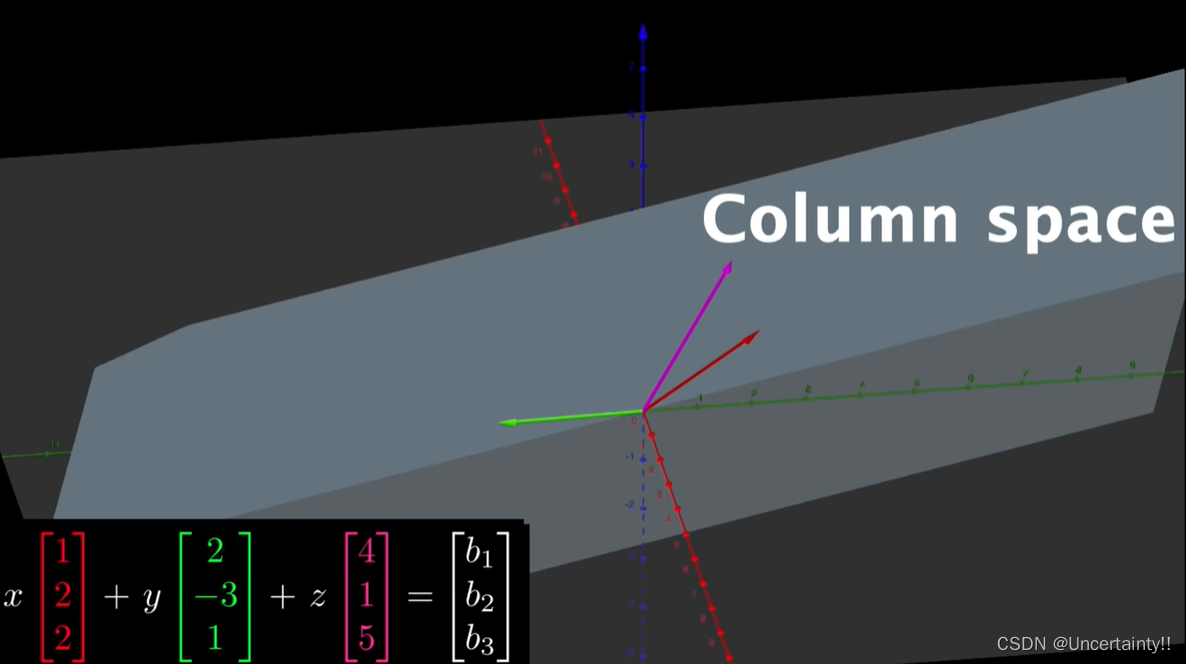
上图中列空间是由矩阵 AAA 的三个列向量线性组合张成的空间。
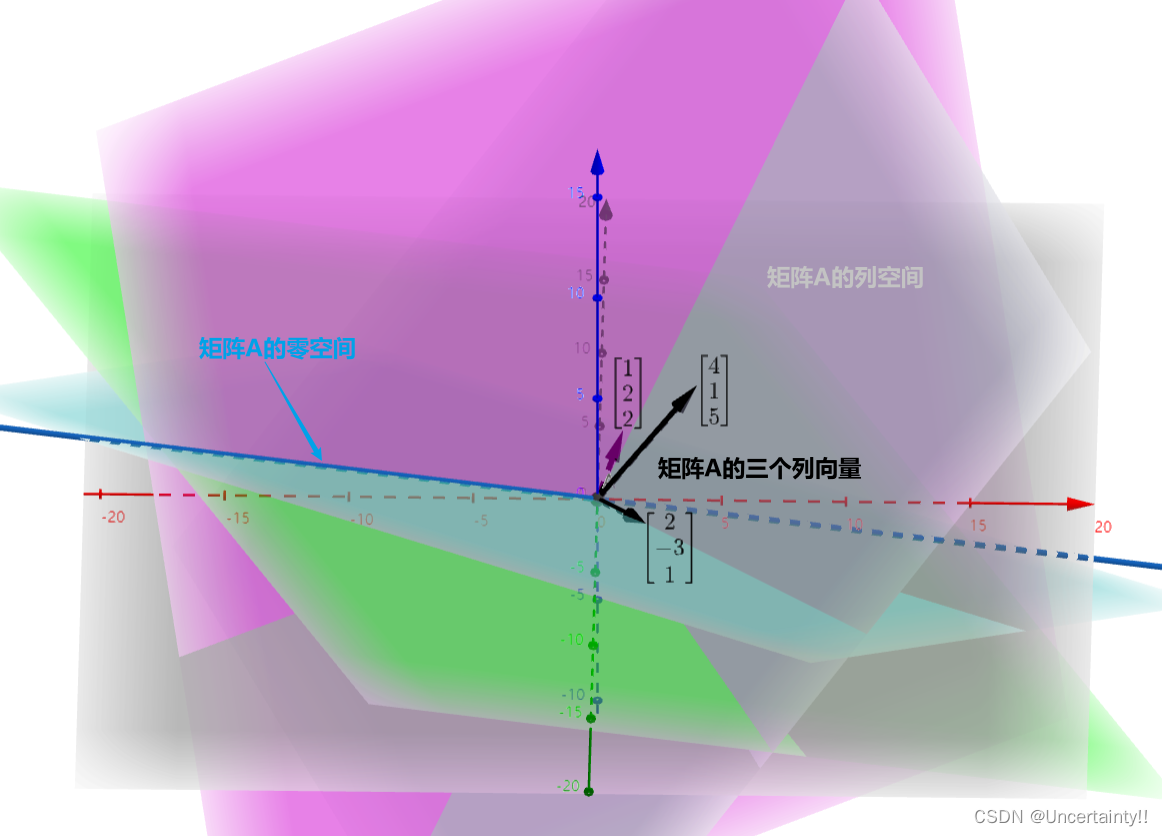
我们将矩阵 AAA 的三个空间放在一起看看它们之间的关系:
5 左零空间(Left Nullspace,N(AT)N(A^T)N(AT))
非齐次线性方程组
方程组的矩阵表示
注意此矩阵为 ATA^TAT
ATy⃗=0⃗A^T \vec{y} = \vec{0}ATy=0
将上式化为矩阵 AAA 乘以某个向量的形式:
ATy⃗=0⃗(ATy⃗)T=0⃗Ty⃗TA=0⃗T\begin{align*} A^T \vec{y} &= \vec{0} \\ (A^T \vec{y})^T &= \vec{0}^T \\ \vec{y}^T A &= \vec{0}^T \end{align*}ATy(ATy)TyTA=0=0T=0T
上述式子中 y⃗TA=0⃗T\vec{y}^T A = \vec{0}^TyTA=0T,解向量 y⃗T\vec{y}^TyT 在矩阵 AAA 的左侧,从这里体现了“左”字。
矩阵 AAA 的左零空间就是矩阵 ATA^TAT 的零空间。
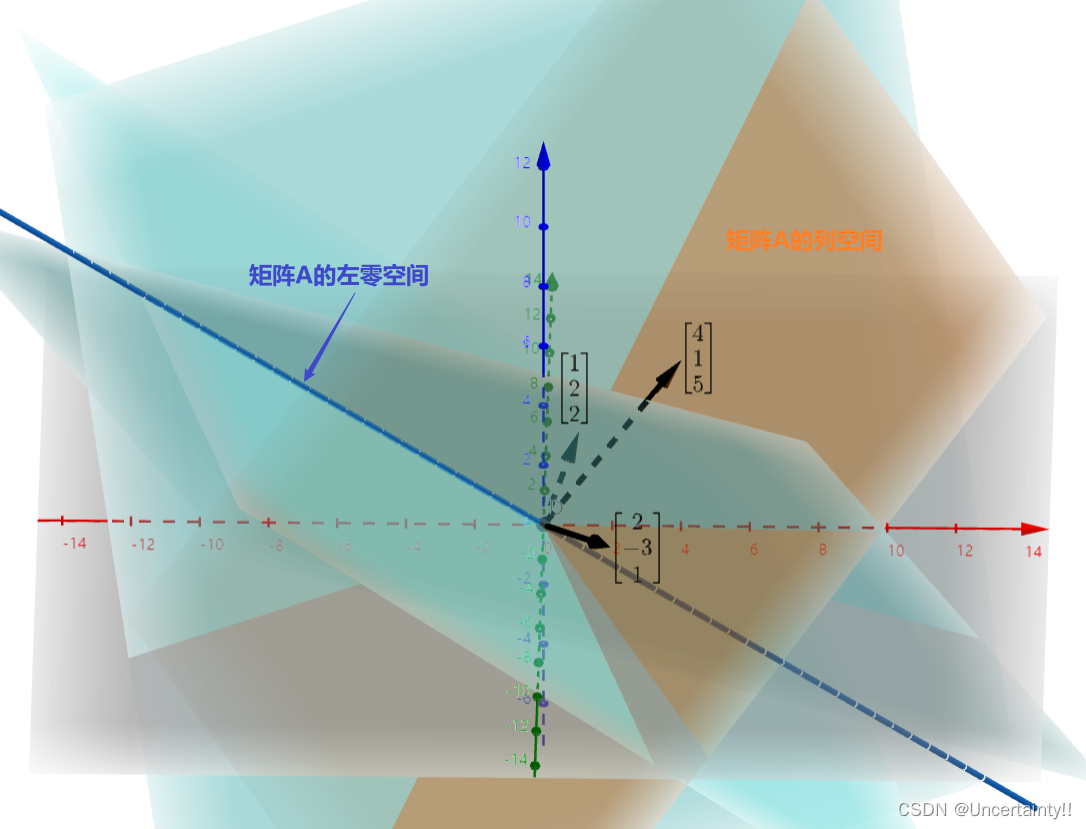
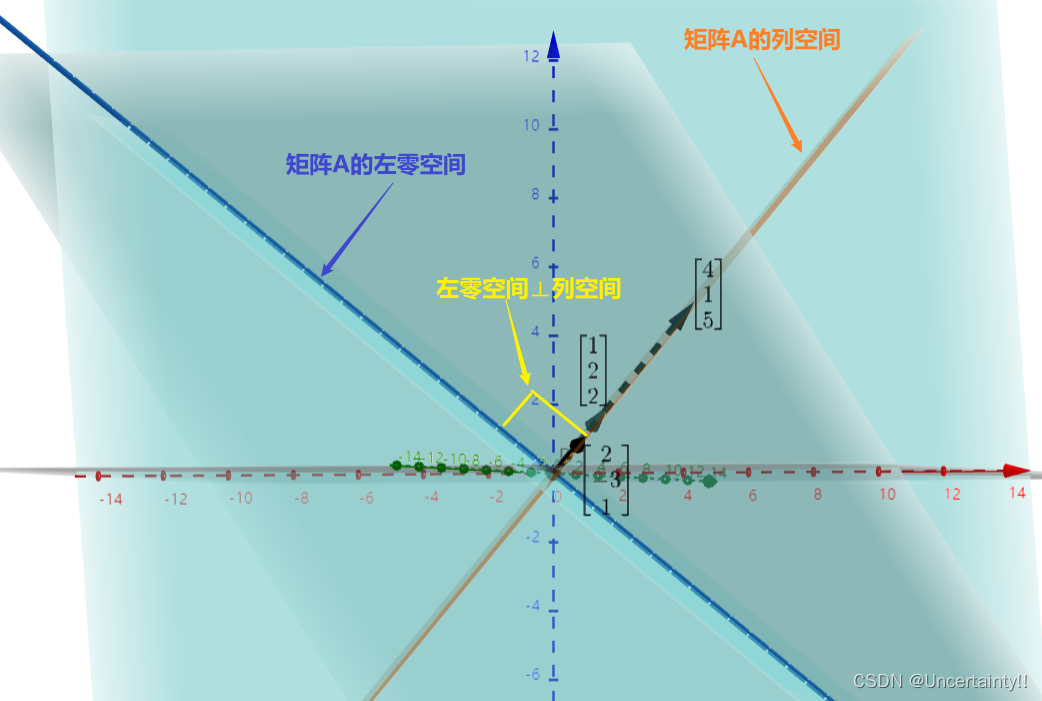
6 列空间与左零空间
左零空间 ⊥\perp⊥ 列空间
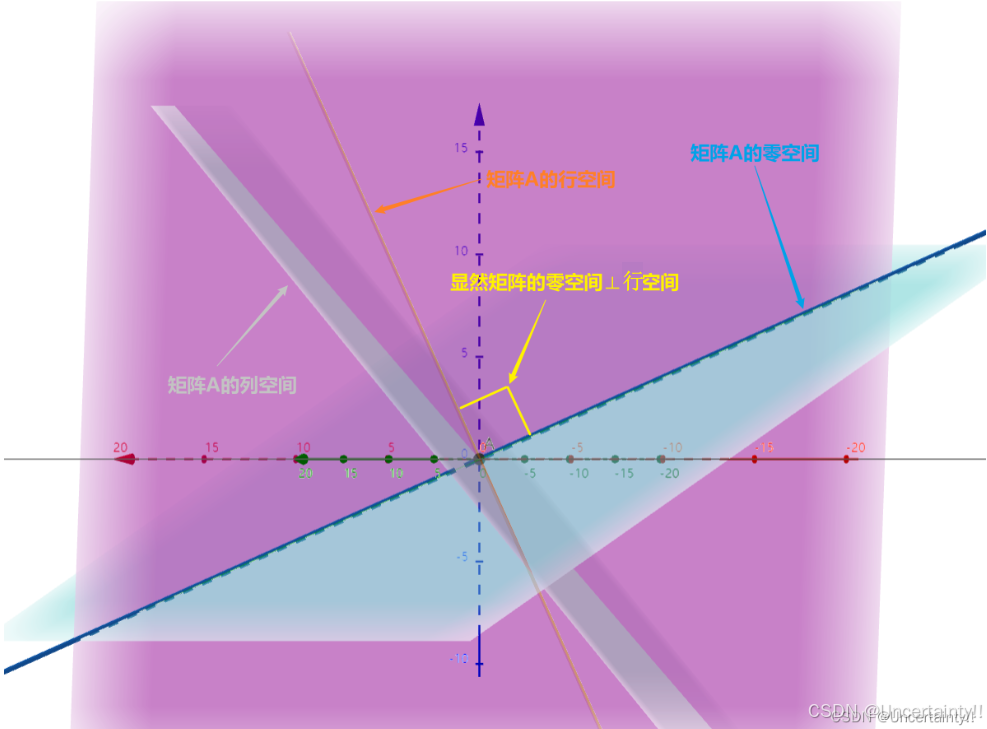
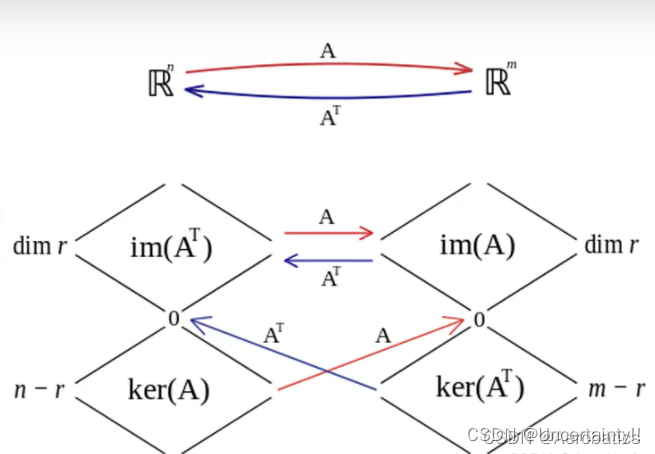
7 各个空间之间的关系
零空间 ⊥\perp⊥ 行空间
列空间 ⊥\perp⊥ 左零空间
下面第一张图来自:线性代数“正交”全家桶(2) :正交子空间
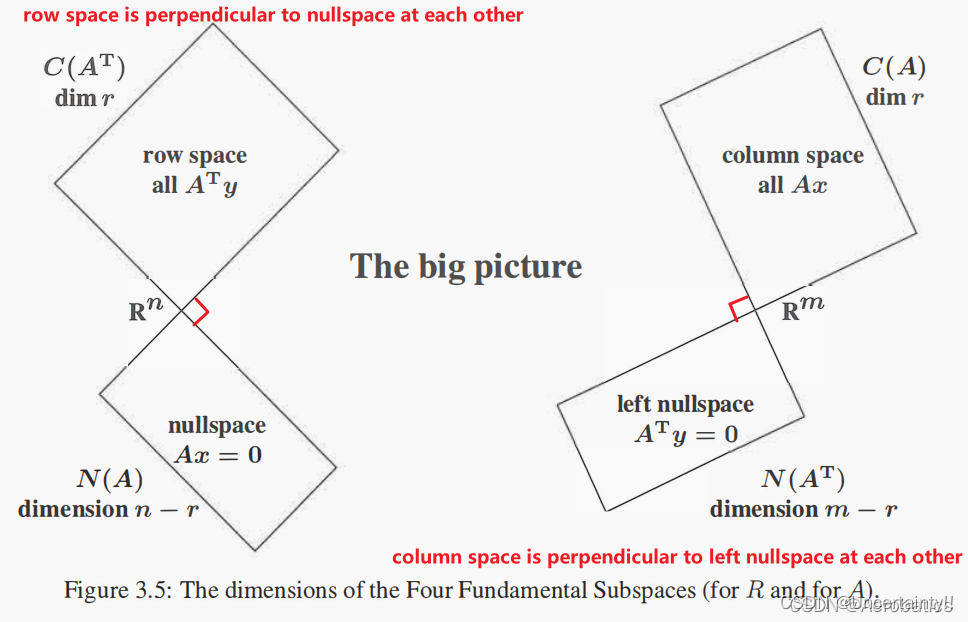
对于任一矩阵 Am×nA_{m \times n}Am×n,都有
Row Rank=Column Rank=Rank\text{Row Rank} = \text{Column Rank} = \text{Rank}Row Rank=Column Rank=Rank
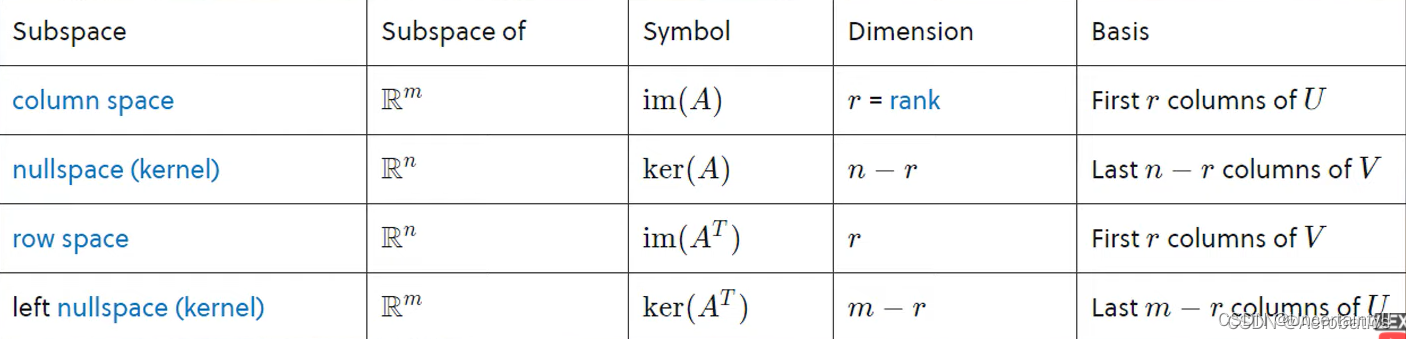
行空间:im(AT)\text{im}(A^T)im(AT)
零空间:ker(A)\text{ker}(A)ker(A)
列空间:im(A)\text{im}(A)im(A)
左零空间:ker(AT)\text{ker}(A^T)ker(AT)
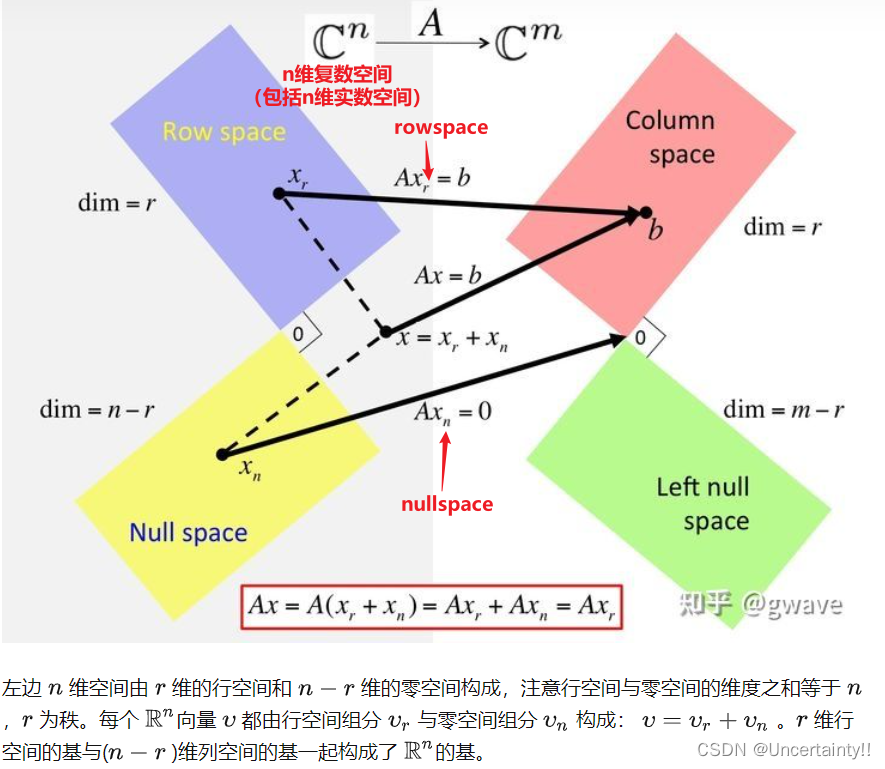
行空间和零空间构成 nnn 维空间。
列空间和左零空间构成 mmm 维空间。
8 基础解系与极大线性无关组
行空间、零空间、列空间及左零空间均由相应线性方程组的所有解构成。由于每个解均可视为一个点,该点与原点构成向量,因此可以认为线性方程组的解向量构成了上述空间。简而言之,这些空间均为相应线性方程组的解空间。
解向量的极大线性无关组被称为基础解系,该基础解系相当于解空间的基。基础解系能够通过线性组合生成所有解向量,即所有解向量均可由基础解系线性表示。
9 齐次与非齐次方程组的解
零空间和左零空间是齐次方程组的解所构成的空间。
行空间和列空间是非齐次方程组的解所构成的空间。
Ax⃗=b⃗A \vec{x} = \vec{b}Ax=b 的解集是一个和 Ax⃗=0⃗A \vec{x} = \vec{0}Ax=0 的解空间相平行的结构,该结构是 Ax=0Ax=0Ax=0 的解空间沿着一个特解方向平移的结果。
下面第一张图来自:矩阵乘法核心思想(3):零空间
via:
-
什么是线性、非线性、齐次、非齐次_齐次和线性怎么理解-CSDN博客
https://blog.csdn.net/m0_46204224/article/details/105913843 -
从线代角度图解:通解、特解、非齐次通解、非齐次特解、齐次通解、齐次特解_齐次解和特解-CSDN博客
https://blog.csdn.net/weixin_48524215/article/details/126554508 -
再理解:零空间、行空间、列空间、左零空间、基础解系、极大线性无关组、齐次解、非齐次解之间的关系-CSDN博客
https://blog.csdn.net/weixin_48524215/article/details/126699137-
矩阵乘法核心思想(2):行空间 - 知乎
https://zhuanlan.zhihu.com/p/348551903 -
矩阵乘法核心思想(3):零空间 - 知乎
https://zhuanlan.zhihu.com/p/350076095
-