Motion-sensor基础应用
三轴加速度计是一种用于测量物体在三维空间中沿X、Y、Z三个轴向加速度的电子设备,广泛应用于工业监测、消费电子、航空航天等领域。
工作原理
MEMS换能器(Transducer)可分为传感器(Sensor)和致动器(Actuator)两类。其中传感器会接受外界的传递的物理性输入,通过感测器转换为电子信号,再最终转换为可用的信息,如加速度传感器、陀螺仪、压力传感器等。其主要感应方式是对一些微小的物理量的变化进行测量,如电阻值、电容值、应力、形变、位移等,再通过电压信号来表示这些变化量。致动器则接受来自控制器的电子信号指令,做出其要求的反应动作,如光敏开关、MEMS显示器等。
目前的加速度传感器有多种实现方式,主要可分为压电式、电容式及热感应式三种,这三种技术各有其优缺点。以电容式3轴加速度计的技术原理为例。电容式加速度计能够感测不同方向的加速度或振动等运动状况。其主要为利用硅的机械性质设计出的可移动机构,机构中主要包括两组硅梳齿(Silicon Fingers),一组固定,另一组随即运动物体移动;前者相当于固定的电极,后者的功能则是可移动电极。当可移动的梳齿产生了位移,就会随之产生与位移成比例电容值的改变。
当运动物体出现变速运动而产生加速度时,其内部的电极位置发生变化,就会反映到电容值的变化(ΔC),该电容差值会传送给一颗接口芯片(InteRFace Chip)并由其输出电压值。因此3轴加速度传感器必然包含一个单纯的机械性MEMS传感器和一枚ASIC接口芯片两部分,前者内部有成群移动的电子,主要测量XY及Z轴的区域,后者则将电容值的变化转换为电压输出。
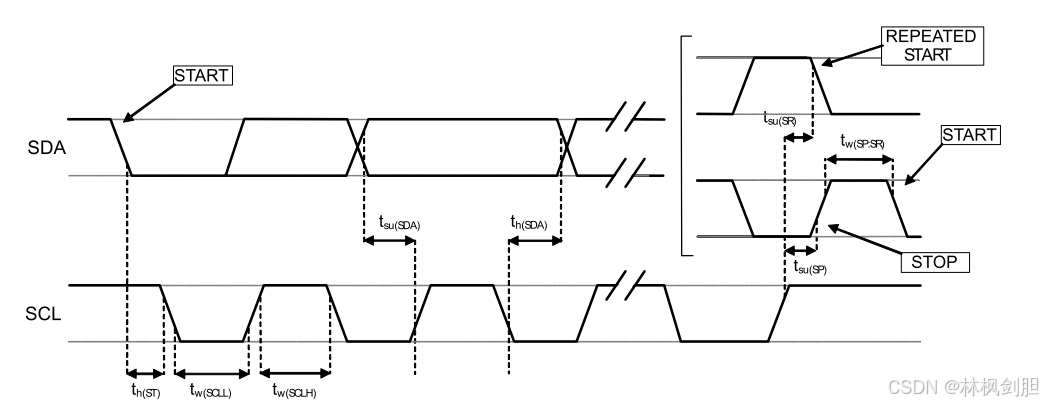
驱动时序图
sensor驱动程序示例
#include <stdint.h>
#include <stdio.h>
#include "i2c.h" // 假设有一个I2C库#define SENSOR_I2C_ADDRESS 0x18 // SENSOR的I2C地址
#define CTRL1_REG 0x20 // 控制寄存器1地址
#define CTRL6_REG 0x25 // 控制寄存器6地址
#define OUT_X_L_REG 0x28 // X轴低字节寄存器地址// 函数声明
void SENSOR_WriteRegister(uint8_t reg, uint8_t value);
uint8_t SENSOR_ReadRegister(uint8_t reg);
void SENSOR_Init(void);
void SENSOR_ReadAcceleration(int16_t *x, int16_t *y, int16_t *z);// 写入寄存器函数
void SENSOR_WriteRegister(uint8_t reg, uint8_t value) {
uint8_t data[2];
data[0] = reg;
data[1] = value;
I2C_Write(SENSOR_I2C_ADDRESS, data, 2);
}// 读取寄存器函数
uint8_t SENSOR_ReadRegister(uint8_t reg) {
uint8_t value;
I2C_Write(SENSOR_I2C_ADDRESS, ®, 1);
I2C_Read(SENSOR_I2C_ADDRESS, &value, 1);
return value;
}// 初始化SENSOR
void SENSOR_Init(void) {
// 设置ODR为100 Hz,高性能模式
SENSOR_WriteRegister(CTRL1_REG, 0x50);// 设置量程为±4g
SENSOR_WriteRegister(CTRL6_REG, 0x01);
}// 读取加速度数据
void SENSOR_ReadAcceleration(int16_t *x, int16_t *y, int16_t *z) {
uint8_t data[6];
uint8_t reg = OUT_X_L_REG;// 读取6个字节的加速度数据(X, Y, Z轴的低字节和高字节)
I2C_Write(SENSOR_I2C_ADDRESS, ®, 1);
I2C_Read(SENSOR_I2C_ADDRESS, data, 6);// 将读取的数据转换为16位有符号整数
*x = (int16_t)((data[1] << 8) | data[0]);
*y = (int16_t)((data[3] << 8) | data[2]);
*z = (int16_t)((data[5] << 8) | data[4]);
}int main(void) {
int16_t x, y, z;// 初始化I2C接口
I2C_Init();// 初始化SENSOR
SENSOR_Init();// 读取加速度数据
SENSOR_ReadAcceleration(&x, &y, &z);// 打印加速度数据
printf("X: %d, Y: %d, Z: %d\n", x, y, z);return 0;
}