无人出租车(Robotaxi)还有哪些技术瓶颈?
近几年,自动驾驶的新闻不断登上头条:Zoox 在拉斯维加斯推出完全无人驾驶 Robotaxi,小马智行、百度 Apollo 在国内城市开始示范运营……看似离我们越来越近。但似乎自动驾驶仍在探索实验阶段,“L5完全自动驾驶” 走进我们的生活还要多久?

本质原因在于:自动驾驶不仅是一项单一技术,而是多学科交织的复杂系统工程。出于好奇,查阅了很多资料,下面试着从底层架构看看自动驾驶的核心技术难点有哪些。也欢迎自动驾驶领域的专家解惑🙏
01 感知系统:看得清 ≠ 看得准
首先,感知层相当于汽车的眼睛,就像人类一样,也有迷茫的时候:
-
传感器局限性:摄像头在强光/夜间/雨雾中等情况下识别率下降;激光雷达虽精确但成本高;毫米波雷达对静态物体的识别不足。
-
多源融合难题:如何把不同模态的数据(视觉、雷达、GPS、IMU 等)实时融合,减少误判与盲区?
-
极端场景处理:反光路面、积雪覆盖车道线、施工改道等情况常常让算法失效。
当前主流技术在“长尾问题”(极端但危险的场景)上,而这些恰恰是保证安全的关键。
02 决策与规划:AI 的“大脑”能否冷静应对复杂交通?
如今智能车都需要连接云端AI模型,由模型根据采集到的指标进行实时分析和决策,坦白来说,在国内复杂的路况下,很多场景由人来处理都会产生不同的结果,那么AI呢?
-
博弈复杂性:人与车、车与车之间的互动往往带有不确定性,例如十字路口的“互相谦让”或“抢行、插队、强行并线”等。
-
实时性要求:决策必须在毫秒级完成,否则可能导致延迟动作引发事故。
-
多目标权衡:如何同时兼顾安全、效率、舒适度?
目前决策模块更多依赖规则 + 深度学习混合架构,但算法泛化性不足。当面对没有“见过”的交通情况时,容易做出不合理的动作,有篇新闻报道某厂商的无人出租车停在路中间不知所措。
03 高精地图与定位:世界在不断变化
地图的标注永远赶不上最新的路况变化,地图软件的信息永远都是过去的。我相信有很多小伙伴都被第一代车载导航仪导进沟里或者死胡同吧😂
-
地图动态更新困难:道路施工、临时交通管制,地图数据可能随时失效。
-
定位精度要求极高:厘米级误差可能导致车辆偏离车道。
-
不同环境兼容性:隧道、立交桥、卫星信号弱的城区,对 GPS/IMU 依赖过大。
高精地图的构建和维护成本极高(采集、标注、更新),难以实现大规模推广。
04 系统安全与冗余:可靠性是生命线
传统汽车的安全性在于司机自身对车的态度,是否及时保养等措施可以有效避免很多安全隐患;而智能车背后是一套复杂的软硬件模块支撑,做IT的都明白,安全漏洞是永远堵不完的,魔高一尺道高一丈。
-
硬件冗余:传感器/计算平台必须容错,否则单点失效会带来致命风险。
-
网络与网络安全:车联网被攻击、数据篡改,可能导致安全事故。
-
功能安全标准:如何在软硬件复杂交互中满足 ISO 26262、SOTIF 等标准?
实现高等级自动驾驶需要冗余设计(双计算平台、双传感器阵列),但这意味着硬件成本暴涨。
05 法规与伦理:不仅是技术问题
-
法律责任归属:无人车出事故,责任在车主、运营商还是开发商?
-
保险理赔机制缺失:现有车险体系无法完全覆盖自动驾驶场景。
-
社会接受度:公众对“无人车”的信任度仍有限,尤其在安全事故报道后。
技术成熟不等于马上落地,缺乏法律保障与伦理共识,况且又会涉及到几千万的运营司机的工作,进一步扩大推广的难度不小。
06 当前的突破口与未来展望
目前自动驾驶主要在划定区域运营。
-
限定场景优先:L4 自动驾驶率先在园区、港口、固定接驳线路落地。
-
软硬件协同优化:降低激光雷达成本,提升车规级芯片算力。
-
法规沙盒试点:通过区域试点探索责任认定与保险模式。
长远来看,自动驾驶不单是汽车自身的事情,还需要配套的交通、生活方式等改变,是一个大概念:
-
长尾问题攻坚:通过大模型 + 自监督学习,提高系统在极端场景下的泛化能力。
-
人机协同:至少在未来 10 年内,自动驾驶与人类驾驶将长期共存。
-
交通体系重构:一旦自动驾驶规模化应用,城市道路设计、交通规则都可能随之改变。
✍️ 结语
自动驾驶不是“明天就能取代人类司机”的科技神话,而是一场跨越数十年的系统工程。工程师们面临的难点,既有算法和硬件的极限,也有法律和社会的挑战。
真正的突破点在于:如何一步步解决“长尾问题”、降低成本、构建可信的法律与社会环境。
未来自动驾驶的发展路径,不是一夜之间的“完全无人化”,而是逐步渗透、分场景替代、人机共驾并存的过程。就像当年电商逐步把生意搬到网上、网约车逐步替代传统出租车的故事。
未来,关于无人驾驶对我们生活的影响,请点击👉无人驾驶时代:共享汽车司机消失倒计时?
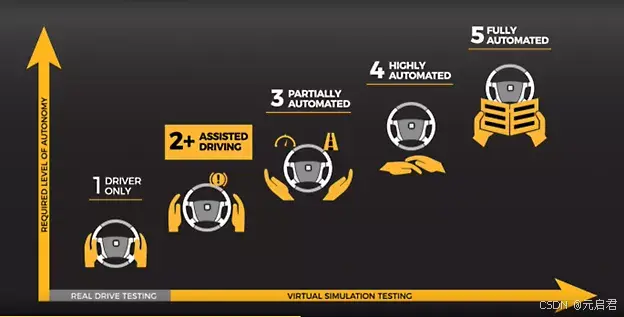
附:无人驾驶等级划分