Day22 用C语言编译应用程序
文章目录
- 1. 保护操作系统5(harib19a)
- 2. 帮助发现bug(harib19b)
- 3. 强制结束应用程序(harib19c)
- 4. 用C语言显示字符串(harib19e)
- 5. 显示窗口(harib19f)
1. 保护操作系统5(harib19a)
上一章节已经对“应用软件在系统内存上动手脚”这一case做了防护。不过定时器上还是存在安全漏洞的,接下来crack3的目的是使光标闪烁变慢,使任务切换的速度变慢。
# crack3.nas 文件
[INSTRSET "i486p"]
[BITS 32]MOV AL,0x34OUT 0x43,ALMOV AL,0xffOUT 0x40,ALMOV AL,0xffOUT 0x40,AL# 上述代码的功能与下列相当
# io_out8(PIT_CTRL, 0x34);
# io_out8(PIT_CNT0, 0xff);
# io_out8(PIT_CNT0, 0xff);MOV EDX,4INT 0x40
但这并不会针对性的影响到定时器,因为直接再应用程序中使用IN和OUT指令的话,会产生一般保护异常,然后就在屏幕上显示“General Protected Exception”。
简单粗暴的crack4,目的是直接禁止中断,那么就会不再产生定时器中断,任务切换也会停止,键盘鼠标中断也会停止。
# crack4.nas 文件
[INSTRSET "i486p"]
[BITS 32]CLI
fin:HLTJMP fin
但其实,应用程序中也不能直接使用CLI, STI和HLT指令,这些也会产生一般保护异常。可以尝试CALL操作系统函数(_io_cli)的地址,通过查看map文件可以该函数地址。
# crack5.nas 文件
[INSTRSET "i486p"]
[BITS 32]CALL 2*8:0xac1MOV EDX,4INT 0x40
但是还忽略了一点,应用程序的地址的CALL并不是任意的,只能CALL设置好的地址。所以crack5程序还是会产生一般保护异常。应用程序期望调用操作系统只能才做INT 0x40的方式。
临时修改hrb_api,使它可以处理一个临时的edx用于破坏操作系统,并在应用程序中INT 0x40,但是对定时器或键盘鼠标中断下手,确实并不简单。
// console.c 文件
int *hrb_api(int edi, int esi, int ebp, int esp, int ebx, int edx, int ecx, int eax)
{int cs_base = *((int *) 0xfe8);struct TASK *task = task_now();struct CONSOLE *cons = (struct CONSOLE *) *((int *) 0x0fec);if (edx == 1) {cons_putchar(cons, eax & 0xff, 1);} else if (edx == 2) {cons_putstr0(cons, (char *) ebx + cs_base);} else if (edx == 3) {cons_putstr1(cons, (char *) ebx + cs_base, ecx);} else if (edx == 4) {return &(task->tss.esp0);} else if (edx == 123456789) {*((char *) 0x00102600) = 0;}return 0;
}
# crack6.nas 文件
[INSTRSET "i486p"]
[BITS 32]MOV EDX,123456789INT 0x40MOV EDX,4INT 0x40
2. 帮助发现bug(harib19b)
CPU的异常处理功能,除了可以保护操作系统免遭应用程序的破坏,还可以帮助在编写程序时及时发现bug,例如数组越界访问等。
当一个局部数组变量被越界访问时,就有可能产生栈异常。栈异常的中断号为0x0c。0x0c的中断函数类似0x0d,只是改一下异常时的信息打印就好。
# naskfunc.nas 文件
_asm_inthandler0c:STIPUSH ESPUSH DSPUSHADMOV EAX,ESPPUSH EAXMOV AX,SSMOV DS,AXMOV ES,AXCALL _inthandler0cCMP EAX,0JNE end_appPOP EAXPOPADPOP DSPOP ESADD ESP,4 # 类似 INT 0x0d IRETD
// console.c 文件
int *inthandler0c(int *esp)
{struct CONSOLE *cons = (struct CONSOLE *) *((int *) 0x0fec);struct TASK *task = task_now();char s[30];cons_putstr0(cons, "\nINT 0C :\n Stack Exception.\n");sprintf(s, "EIP = %08X\n", esp[11]);cons_putstr0(cons, s);return &(task->tss.esp0); /* 强制结束程序 */
}
// dsctbl.c 文件
void init_gdtidt(void)
{set_gatedesc(idt + 0x2c, (int) asm_inthandler2c, 2 * 8, AR_INTGATE32); // 注册给idt
}
在inthandler0c函数中,企图打印esp[11],即EIP,会将下一条将要被执行的指令在内存中的地址打印出来。因此inthandler0c的含义就是在发生异常时,把异常产生的指令地址打印出来。然后再根据.map文件和.lst文件就能定位到产生异常的具体位置。
3. 强制结束应用程序(harib19c)
如果一个应用程序中存在一个毫不间歇的死循环,那么系统整体的速度就会变慢。为了防止类似死循环这种程序,可以将某一个按键作为强制结束键,按一下就可以结束程序。
将强制结束任务写在bootpack.c文件的HariMain函数的键盘中断处理中:
// bootpack.c 文件
void HariMain(void)
{/* 省略 */i = fifo32_get(&fifo);io_sti();if (256 <= i && i <= 511){if (i == 256 + 0x3b && key_shift != 0 && task_cons->tss.ss0 != 0) { /* Shift+F1 */cons = (struct CONSOLE *) *((int *) 0x0fec);cons_putstr0(cons, "\nBreak(key) :\n");io_cli();task_cons->tss.eax = (int) &(task_cons->tss.esp0);task_cons->tss.eip = (int) asm_end_app;io_sti();}}/* 省略 */
}
# naskfunc.nas 文件
# asm_end_app是end_app函数的修改
_asm_end_app:
# EAX为tss.esp0的地址MOV ESP,[EAX]MOV DWORD [EAX+4],0POPADRET # 返回cmd_app
当 按下强制结束键时,改写命令行窗口任务的寄存器值,并goto到asm_end_app函数,如此便可以强制结束程序。
// mtask.c 文件
struct TASK *task_alloc(void)
{/* 省略 */for (i = 0; i < MAX_TASKS; i++) {if (taskctl->tasks0[i].flags == 0) {task = &taskctl->tasks0[i];/* 省略 */task->tss.ss0 = 0;return task;}}return 0;
}
还需要确保task_cons->tss.ss0不为0时采取调用结束程序,为防止应用程序还未运行(task_cons->tss.ss0为0)进行调用。
4. 用C语言显示字符串(harib19e)
第一个供c语言调用的api:
# a_nask.nas 文件
_api_putstr0: ; void api_putstr0(char *s);PUSH EBXMOV EDX,2MOV EBX,[ESP+8] ; sINT 0x40POP EBXRET
但此时如果直接在c语言中调用api_putstr0函数,应该是无法在屏幕上显示参数s的。
调试api之前,先解释一下可执行程序.hrb文件的内容。可执行程序.hrb文件由两部分组成:代码部分和数据部分。其中,数据部分在位于代码部分的开头一块区域中。当应用程序启动时,数据部分被传送到应用程序使用的数据段中。
对于.hrb文件:
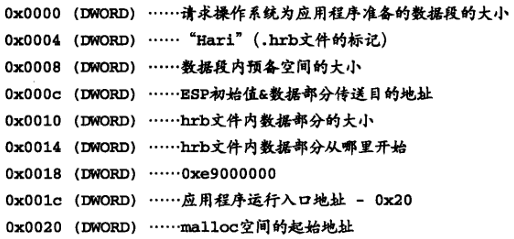
0x0000 存放的是应用程序启动后数据段的大小,当前固定大小为64KB。
0x0004 存放的是“Hari”这四个字符,读取文件的时候会先判断这四个字节,判断一致才会当作可执行程序处理。
0x0008 存放的是数据段预备空间的大小。暂时没有使用。
0x000c 存放的是应用程序启动时,ESP的初始值。也就是说,0x000c位置的内容表示栈指针,调用api_putstr0的时候所传入的参数s就会放在0x000c的内容所代表的内存地址处。例如,可执行程序hello4.hrb被执行时char *参数s的地址是0x0400,就是文件hello4.hrb的0x000c处写的0x0400。而这个值之前的部分会作为栈来使用,也就是1024字节(十六进制就是0x0400),这个值在编译的时候已经确定好了。
# Makefile 文件
hello4.bim : hello4.obj a_nask.obj Makefile$(OBJ2BIM) @$(RULEFILE) out:hello4.bim stack:1k map:hello4.map \hello4.obj a_nask.obj
0x0010和0x0014 的目的是当.hrb文件被加载时,告诉操作系统该可执行文件的数据大小和在文件中的位置。
0x0018 在内存中的放置应该是“00 00 00 E9”,其中E9是JMP指令的机器码,这就相当于在0x001b位置存放了一个JMP指令。
0x001c 的程序入口结合0x001b的JMP指令,就可以运行可执行文件了。(但是程序入口地址-0x20是为啥,不太清楚)
0x0020 存放对应用程序使用的malloc函数调用之后的返回地址。
根据以上内容需要修改console.c文件。
// console.c 文件
int cmd_app(struct CONSOLE *cons, int *fat, char *cmdline)
{/* 省略 */if (finfo != 0) {/* 找到文件 */p = (char *) memman_alloc_4k(memman, finfo->size);file_loadfile(finfo->clustno, finfo->size, p, fat, (char *) (ADR_DISKIMG + 0x003e00));if (finfo->size >= 36 && strncmp(p + 4, "Hari", 4) == 0 && *p == 0x00) {segsiz = *((int *) (p + 0x0000));esp = *((int *) (p + 0x000c));datsiz = *((int *) (p + 0x0010)); // 数据部分的大小dathrb = *((int *) (p + 0x0014)); // 数据部分在文件中的位置q = (char *) memman_alloc_4k(memman, segsiz); // 根据hrb文件确定数据段大小*((int *) 0xfe8) = (int) q;set_segmdesc(gdt + 1003, finfo->size - 1, (int) p, AR_CODE32_ER + 0x60);set_segmdesc(gdt + 1004, segsiz - 1, (int) q, AR_DATA32_RW + 0x60);for (i = 0; i < datsiz; i++) {// 执行程序前把数据部分拷贝到数据段q[esp + i] = p[dathrb + i];}start_app(0x1b, 1003 * 8, esp, 1004 * 8, &(task->tss.esp0));memman_free_4k(memman, (int) q, segsiz);} else {// 找不到Hari则报错cons_putstr0(cons, ".hrb file format error.\n");}memman_free_4k(memman, (int) p, finfo->size);cons_newline(cons);return 1;}/* 未找到文件 */return 0;
}
为啥将“Hari”字符放在文件的0x0004位置,而不是0x0000位置呢?
0x0000位置存放的是应用程序启动后数据段的大小,bim2hrb会自动将该内容调整为4KB的倍数,所以0x0000位置的字节必定是00。一个普通文件的0x0000位置却很小可能是00,但是却有可能是某个字母,所以将“Hari”字符放在文件的0x0004位置可以提高访问的安全性。
5. 显示窗口(harib19f)
现在期望实现一个用于显示窗口的api,暂时这样设计:
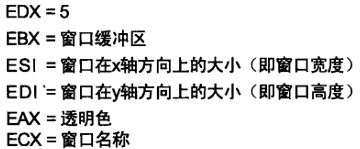
调用后返回值:

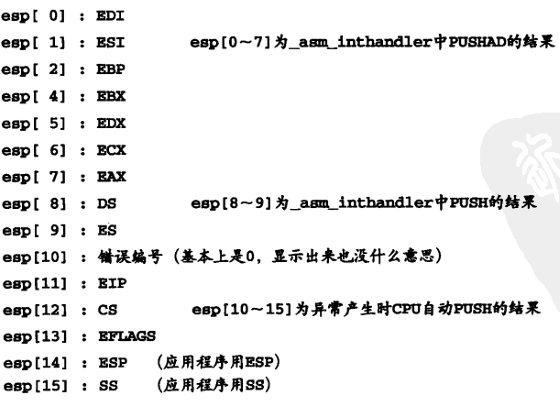
但是当前有个问题,如何将返回值传递给应用程序。中断服务函数会通过IRETD安全的返回应用程序,并且在返回之前会把8个32位寄存器POPAD出去,所以只能依赖POPAD和IRETD。
两次PUSHAD之后的栈是这样的:
[高地址]
EAX <— 1st
ECA
EDX
EBX
ESO
EBP
ESI
EDI
EAX <— 2nd, hrb_api使用到的就是这里及以下
ECA
EDX
EBX
ESO
EBP
ESI
EDI
// console.c 文件
int *hrb_api(int edi, int esi, int ebp, int esp, int ebx, int edx, int ecx, int eax)
{int ds_base = *((int *) 0xfe8); // 来自于bootpack.c的HariMain函数中的shtctl变量struct TASK *task = task_now();struct CONSOLE *cons = (struct CONSOLE *) *((int *) 0x0fec);struct SHTCTL *shtctl = (struct SHTCTL *) *((int *) 0x0fe4);struct SHEET *sht;int *reg = &eax + 1; /* 参照栈空间可知, &eax+1可以获取到系统EDI *//* reg[0] : EDI, reg[1] : ESI, reg[2] : EBP, reg[3] : ESP *//* reg[4] : EBX, reg[5] : EDX, reg[6] : ECX, reg[7] : EAX *//* 省略 */if (edx == 5) {sht = sheet_alloc(shtctl);sheet_setbuf(sht, (char *) ebx + ds_base, esi, edi, eax);make_window8((char *) ebx + ds_base, esi, edi, (char *) ecx + ds_base, 0);sheet_slide(sht, 100, 50);sheet_updown(sht, 3); /* 背景层高度3,位于task_a之上 */reg[7] = (int) sht; // 把sht赋值给EAX,_asm_hrb_api中POPAD的时候会弹出栈}return 0;
}
再写一个测试程序:
# a_nask.nas 文件
_api_openwin: # int api_openwin(char *buf, int xsiz, int ysiz, int col_inv, char *title);PUSH EDIPUSH ESIPUSH EBXMOV EDX,5MOV EBX,[ESP+16] # bufMOV ESI,[ESP+20] # xsizMOV EDI,[ESP+24] # ysizMOV EAX,[ESP+28] # col_invMOV ECX,[ESP+32] # titleINT 0x40 # 调用中断POP EBXPOP ESIPOP EDIRET
// winhello.c 文件
int api_openwin(char *buf, int xsiz, int ysiz, int col_inv, char *title);
void api_end(void);char buf[150 * 50];void HariMain(void)
{int win;win = api_openwin(buf, 150, 50, -1, "hello");api_end();
}