OpenCV 图像金字塔
文章目录
- 一、什么是图像金字塔?
- 二、图像金字塔的核心操作:采样与逆采样
- 1. 向下采样(pyrDown):从高分辨率到低分辨率
- 步骤1:高斯滤波
- 步骤2:删除偶数行与偶数列
- OpenCV实战代码
- 效果特点
- 2. 向上采样(pyrUp):从低分辨率到高分辨率
- 步骤 1:插值补全像素
- 步骤 2:高斯滤波
- OpenCV 实战代码
- 效果特点
- 三、拉普拉斯金字塔:捕捉采样丢失的细节
- 1. 拉普拉斯金字塔的定义
- 2. 拉普拉斯金字塔的核心作用:图像恢复与融合
- OpenCV 实战:图像恢复
- 效果特点
- 四、图像金字塔的典型应用场景
- 1. 特征点提取(SIFT、ORB 等)
- 2. 模板匹配
- 3. 图像融合
- 4. 光流跟踪
- 五、总结与注意事项
- 核心知识点
- 注意事项
- 注意事项
在计算机视觉领域,如何高效处理不同尺度下的图像信息,是实现 目标检测、特征提取、图像融合等任务的关键。图像金字塔(Image Pyramid)作为一种经典的多分辨率表示方法,通过将图像分解为不同分辨率的子图集合,为解决上述问题提供了简洁而强大的思路。本文将从图像金字塔的基本概念出发,深入解析其核心操作(向下采样与向上采样)、数学原理,并结合OpenCV实战代码与典型应用场景,带你全面掌握这一技术。
一、什么是图像金字塔?
图像金字塔是由同一幅图像的多个不同分辨率子图构成的集合,因其层级结构形似“金字塔”而得名。其核心特征如下:
- 层级关系:金字塔的底部是原始高分辨率图像(记为G₀),向上每一层(G₁、G₂、…、Gₙ)的分辨率都逐步降低,顶部可能仅保留1个像素点。
- 分辨率变化规律:通常每向上移动一层,图像的宽度和高度会缩小为前一层的1/2,像素总数减少为1/4(也可根据需求调整缩放比例)。
- 核心作用:将单分辨率图像转化为多尺度表示,让算法能在不同“尺度”下分析图像(例如大尺度检测目标整体,小尺度捕捉细节)。
示例:若原始图像为512×512(G₀),经过1次向下采样得到256×256的G₁,再采样得到128×128的G₂,以此类推,最终形成“底层大、上层小”的金字塔结构。

二、图像金字塔的核心操作:采样与逆采样
图像金字塔的构建依赖两种基础操作:向下采样(降采样) 和向上采样(升采样)。这两种操作是金字塔分层的核心,但需注意:
它们并非可逆过程——对图像先降采样再升采样,无法恢复原始图像的细节(会丢失信息)。
1. 向下采样(pyrDown):从高分辨率到低分辨率
向下采样是构建高斯金字塔的核心步骤,目的是降低图像分辨率,生成金字塔的上一层子图。其操作遵循“先滤波、再抽样”的原则,具体流程如下:
步骤1:高斯滤波
首先对当前图像(如G₀)进行高斯模糊处理。这一步的核心目的是抑制高频噪声——若直接删除像素,会导致图像边缘出现锯齿或伪影,高斯滤波通过对邻域像素加权平均,平滑图像并保留主要结构。
高斯滤波的权重由二维高斯函数决定:
G(x,y)=12πσ2e−x2+y22σ2G(x,y) = \frac{1}{2\pi\sigma^2} e^{-\frac{x^2 + y^2}{2\sigma^2}} G(x,y)=2πσ21e−2σ2x2+y2
其中,σ为高斯核的标准差(控制模糊程度),通常使用3×3或5×5的高斯核(如3×3核:[121242121]\begin{bmatrix}1&2&1\\2&4&2\\1&2&1\end{bmatrix}121242121,需归一化后使用)。
步骤2:删除偶数行与偶数列
对滤波后的图像,删除所有偶数行和偶数列。例如512×512的图像经此操作后,变为256×256(宽度和高度各减半),像素总数变为原来的1/4。
OpenCV实战代码
import cv2# 读取原始灰度图像(G0)
img = cv2.imread("face.png", cv2.IMREAD_GRAYSCALE)
cv2.imshow("Original (G0)", img)
cv2.waitKey(0)# 第一次向下采样(G1:256×256)
img_down1 = cv2.pyrDown(img)
cv2.imshow("Down Sample 1 (G1)", img_down1)
cv2.waitKey(0)# 第二次向下采样(G2:128×128)
img_down2 = cv2.pyrDown(img_down1)
cv2.imshow("Down Sample 2 (G2)", img_down2)
cv2.waitKey(0)cv2.destroyAllWindows()
效果特点
- 分辨率降低,尺寸缩小;
- 因高斯滤波和平滑,图像整体更模糊,细节(如边缘、纹理)逐渐丢失;
- 每一层都保留了前一层的“概览信息”(如目标的整体形状)。
2. 向上采样(pyrUp):从低分辨率到高分辨率
向上采样是向下采样的逆操作,目的是恢复图像分辨率(生成比当前层更大的子图),但无法恢复向下采样时丢失的细节。其操作流程为“先插值、再滤波”:
步骤 1:插值补全像素
对当前低分辨率图像(如 G₁),在每个像素的行和列之间插入 0 值。例如 256×256 的图像经此操作后,变为 512×512——新图像的宽度和高度翻倍,但插入的 0 值会导致图像出现“网格状”空洞。
步骤 2:高斯滤波
用与向下采样相同的高斯核(需放大 4 倍以匹配像素密度)对插值后的图像进行滤波,填充空洞并平滑图像。例如 3×3 高斯核需调整为 [121242121]\begin{bmatrix}1&2&1\\2&4&2\\1&2&1\end{bmatrix}121242121(与向下采样核一致,因插值后像素密度变为原来的 1/4,核权重需保持对应)。
OpenCV 实战代码
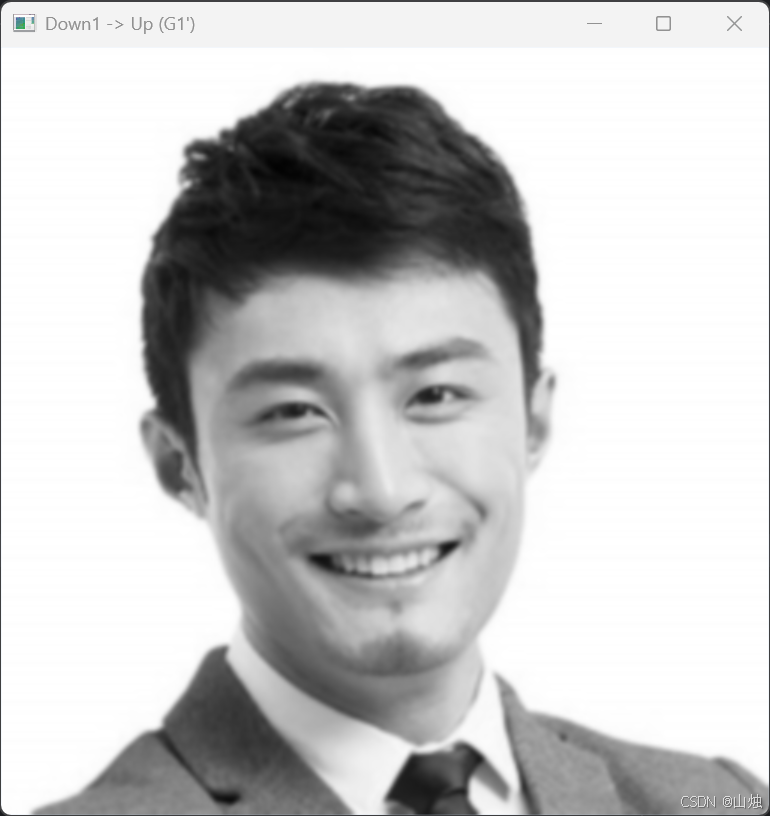
# 对G1进行向上采样(恢复为512×512,但细节丢失)
img_down1_up = cv2.pyrUp(img_down1)
cv2.imshow("Down1 -> Up (G1')", img_down1_up)
cv2.waitKey(0)# 对比原始图像与“降采样+升采样”结果
cv2.imshow("Original (G0)", img)
cv2.imshow("Down1 -> Up (G1')", img_down1_up)
cv2.waitKey(0)
cv2.destroyAllWindows()
效果特点
- 尺寸与原始图像一致(如 512×512),但清晰度远低于原始图像;
- 因丢失的高频细节无法恢复,图像整体偏模糊,边缘过渡不锐利;
- 验证了 “采样不可逆” 的特性 —— 降采样丢失的信息无法通过升采样完全找回。
三、拉普拉斯金字塔:捕捉采样丢失的细节
既然向下采样会丢失细节,如何保留这些信息以便后续恢复图像?拉普拉斯金字塔(Laplacian Pyramid) 应运而生。它通过计算 “原始图像与‘降采样后再升采样’图像的差值”,记录每一层向下采样时丢失的高频细节(边缘、纹理等)。
1. 拉普拉斯金字塔的定义
拉普拉斯金字塔的第 i 层(LiL_iLi)计算公式为:
Li=Gi−pyrUp(pyrDown(Gi))L_i = G_i - \text{pyrUp}(\text{pyrDown}(G_i)) Li=Gi−pyrUp(pyrDown(Gi))
其中:
- GiG_iGi:高斯金字塔的第 i 层(原始或降采样后的图像);
- pyrUp(pyrDown(Gi))\text{pyrUp}(\text{pyrDown}(G_i))pyrUp(pyrDown(Gi)):对 GiG_iGi 先降采样再升采样的结果(尺寸与 GiG_iGi 一致,但细节丢失);
- LiL_iLi:差值图像,记录了 GiG_iGi 中被降采样丢失的高频细节(边缘、纹理等)。
示例:
- L0=G0−pyrUp(pyrDown(G0))L_0 = G_0 - \text{pyrUp}(\text{pyrDown}(G_0))L0=G0−pyrUp(pyrDown(G0)) → 记录 G0G_0G0 到 G1G_1G1 丢失的细节;
- L1=G1−pyrUp(pyrDown(G1))L_1 = G_1 - \text{pyrUp}(\text{pyrDown}(G_1))L1=G1−pyrUp(pyrDown(G1)) → 记录 G1G_1G1 到 G2G_2G2 丢失的细节;
- 以此类推,拉普拉斯金字塔的顶层为高斯金字塔的顶层(无更高层可采样)。
2. 拉普拉斯金字塔的核心作用:图像恢复与融合
拉普拉斯金字塔的最大价值在于恢复高分辨率图像。通过“高斯金字塔的高层图像 + 拉普拉斯金字塔的对应细节”,可逐步重建原始图像:
- 从高斯金字塔顶层 GnG_nGn 开始,对其进行升采样:pyrUp(Gn)\text{pyrUp}(G_n)pyrUp(Gn);
- 加上拉普拉斯金字塔的 Ln−1L_{n-1}Ln−1 层,得到 Gn−1G_{n-1}Gn−1:$ G_{n-1} = \text{pyrUp}(G_n) + L_{n-1} $;
- 重复步骤 1 - 2,直到恢复出原始图像 G0G_0G0。
OpenCV 实战:图像恢复
# 计算拉普拉斯金字塔L0和L1
L0 = img - cv2.pyrUp(img_down1) # G0 - pyrUp(G1)
L1 = img_down1 - cv2.pyrUp(img_down2) # G1 - pyrUp(G2)# 显示拉普拉斯细节(黑色背景下的白色边缘,即丢失的细节)
cv2.imshow("Laplacian L0", L0)
cv2.imshow("Laplacian L1", L1)
cv2.waitKey(0)# 用L0恢复原始图像:pyrUp(G1) + L0 = G0
recovered_img = cv2.pyrUp(img_down1) + L0
cv2.imshow("Recovered Image (G0)", recovered_img)
cv2.imshow("Original Image (G0)", img)
cv2.waitKey(0)
cv2.destroyAllWindows()
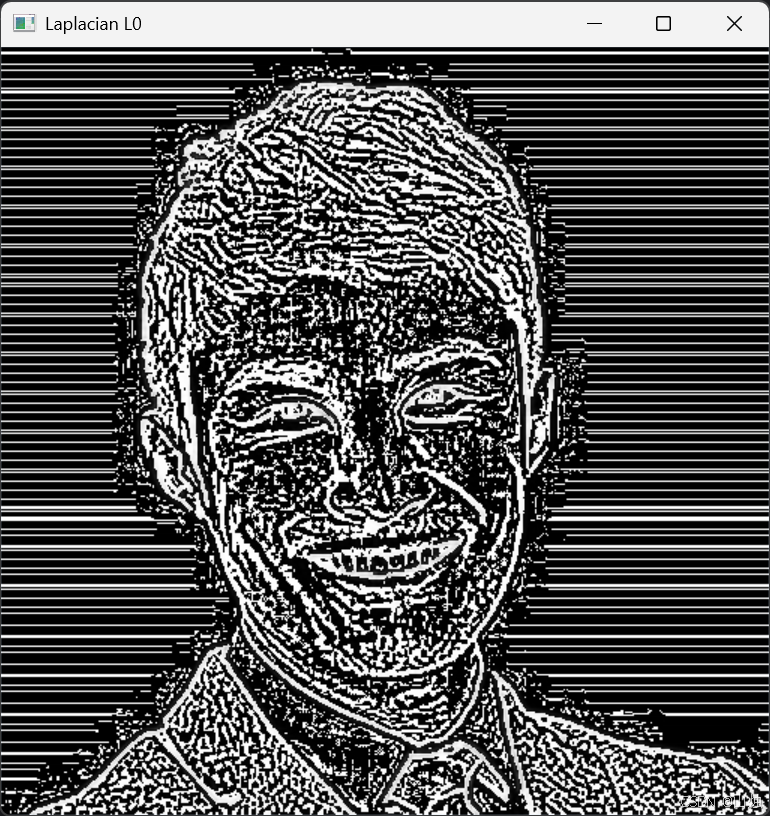
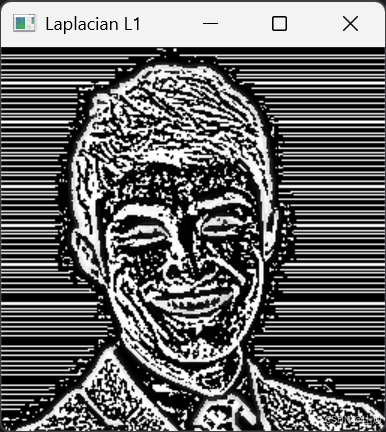
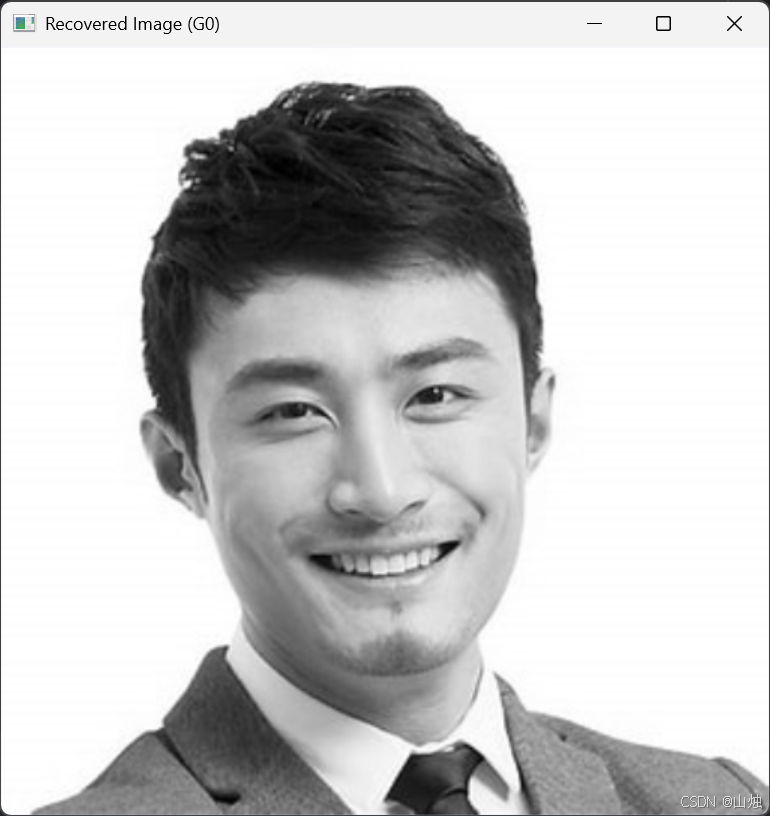
效果特点
- 拉普拉斯图像(L0L_{0}L0、L1L_{1}L1)以 “黑色背景 + 白色边缘” 为主,直观展示了各层丢失的细节;
- 恢复后的图像与原始图像几乎一致(微小差异来自数值精度),验证了拉普拉斯金字塔的细节保留能力。
四、图像金字塔的典型应用场景
图像金字塔的多尺度特性使其成为计算机视觉的基础工具,广泛应用于以下场景:
1. 特征点提取(SIFT、ORB 等)
SIFT(尺度不变特征变换)是经典的特征提取算法,其核心是“在不同尺度下检测稳定的特征点”。图像金字塔为 SIFT 提供了多尺度基础:
- 对原始图像构建高斯金字塔(不同 σ 的模糊图像);
- 计算相邻层的差值(高斯差分金字塔,DoG),检测极值点(潜在特征点);
- 结合拉普拉斯金字塔的细节,筛选出尺度不变的特征点,用于图像匹配、目标识别。
2. 模板匹配
模板匹配是在大图像中寻找与小模板相似区域的任务。若直接在原始图像中匹配,可能因“模板与目标尺度不一致”导致匹配失败。图像金字塔的解决方案是:
- 对原始图像和模板分别构建金字塔;
- 从金字塔顶层(低分辨率)开始匹配,快速定位大致区域;
- 逐步向下层(高分辨率)细化匹配,提高精度。
这种“从粗到细”的匹配方式,既提升了速度,又解决了尺度不一致问题。
3. 图像融合
在图像拼接(如全景图)或曝光融合中,需将多幅图像的重叠区域平滑过渡。图像金字塔的融合流程为:
- 对每幅图像构建高斯金字塔(获取不同尺度的概览);
- 构建对应的拉普拉斯金字塔(获取不同尺度的细节);
- 在拉普拉斯金字塔的每一层,对重叠区域进行加权融合(如左侧图像权重从 1→0,右侧从 0→1);
- 从融合后的拉普拉斯金字塔顶层开始,逐步向上恢复,得到最终融合图像。
优势:可避免融合边缘出现 “拼接痕迹”,实现平滑过渡。
4. 光流跟踪
光流跟踪用于检测视频中运动目标的 “瞬时速度”。由于目标可能在视频中缩放(如靠近 / 远离摄像头),需在多尺度下跟踪:
- 对视频的连续帧构建图像金字塔;
- 在顶层(低分辨率)跟踪目标的大致运动方向;
- 向下层(高分辨率)细化跟踪位置,提高精度;
- 结合各层结果,得到目标在原始分辨率下的光流向量。
五、总结与注意事项
图像金字塔作为计算机视觉的基础技术,其核心价值在于将单分辨率图像转化为多尺度表示,解决了 “尺度不一致”“细节与概览平衡” 等关键问题。
核心知识点
- 高斯金字塔:通过 “向下采样” 构建,每一层都是前一层的低分辨率平滑版本,用于获取图像的概览信息;
- 向上采样:恢复图像尺寸但无法恢复细节,验证了 “采样不可逆”;
- 拉普拉斯金字塔:记录向下采样丢失的细节,用于图像恢复与融合;
- 应用场景:特征提取(SIFT)、模板匹配、图像融合、光流跟踪等。
注意事项
- 分辨率变化:默认每一层的宽 / 高为前一层的 1/2,需注意图像尺寸需为 2 的整数次幂(如 512、256),否则可能出现尺寸偏差;
- 噪声影响:向下采样前的高斯滤波需合理选择 σ(过小易保留噪声,过大易模糊细节);
录向下采样丢失的细节,用于图像恢复与融合;
- 应用场景:特征提取(SIFT)、模板匹配、图像融合、光流跟踪等。
注意事项
- 分辨率变化:默认每一层的宽 / 高为前一层的 1/2,需注意图像尺寸需为 2 的整数次幂(如 512、256),否则可能出现尺寸偏差;
- 噪声影响:向下采样前的高斯滤波需合理选择 σ(过小易保留噪声,过大易模糊细节);
- OpenCV 函数细节:
cv2.pyrDown()和cv2.pyrUp()的dstsize参数可自定义输出尺寸,但需遵循 “向下采样为 1/2,向上采样为 2 倍” 的原则,否则会导致后续计算错误。