空间六自由度
物体在空间具有六个自由度,即沿x、y、z三个直角坐标轴方向的移动自由度和绕这三个坐标轴的转动自由度 。因此,要完全确定物体的位置,就必须清楚这六个自由度。
任何一个没有受约束的物体,在空间均具有6个独立的运动。
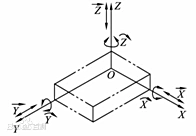
以如图所示的长方形为例,它在直角坐标系oxyz中可以有3个平移运动和3个转动。3个平移运动分别是沿x,y,z轴的平移运动,3个转动分别是绕x,y,z轴的转动。习惯上把上述6个独立运动称做6个自由度。
如果采取一定的约束措施,消除物体的6个自由度,则物体被完全定位。如图所示,采用6个按一定规则设置的支撑点,约束物体6个自由度的原理称为六点定位原理。
六自由度运动平台
六自由度运动平台是由六支作动筒,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,借助六支作动筒的伸缩运动,完成上平台在空间六个自由度(X,Y,Z,α,β,γ)的运动,从而可以模拟出各种空间运动姿态。
自由度在计算机视觉中的概念与理解
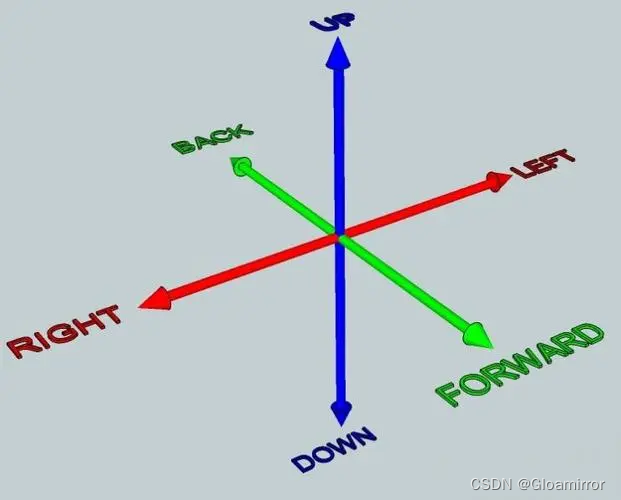
自由度(Degrees of Freedom,简称DoF)是一个用于描述物体在空间中移动和旋转能力的概念。它指的是一个物体或系统在没有受到任何限制时能够独立进行的运动方式的数量。在三维空间中,一个物体的最大自由度是6,通常分为以下六个方向:
平移:
在X轴上的平移(左右移动)
在Y轴上的平移(上下移动)
在Z轴上的平移(前后移动)
旋转:
绕X轴的旋转(俯仰)
绕Y轴的旋转(偏航)
绕Z轴的旋转(滚转)
例如,当我们谈论摄像机或机器人的6-DoF定位时,我们指的是它可以在三个平移方向和三个旋转方向上的所有可能的移动和旋转。这六个自由度允许摄像机或机器人在空间中的任何位置和任何方向进行定位。