ROS机器人运动控制
ROS机器人运动控制
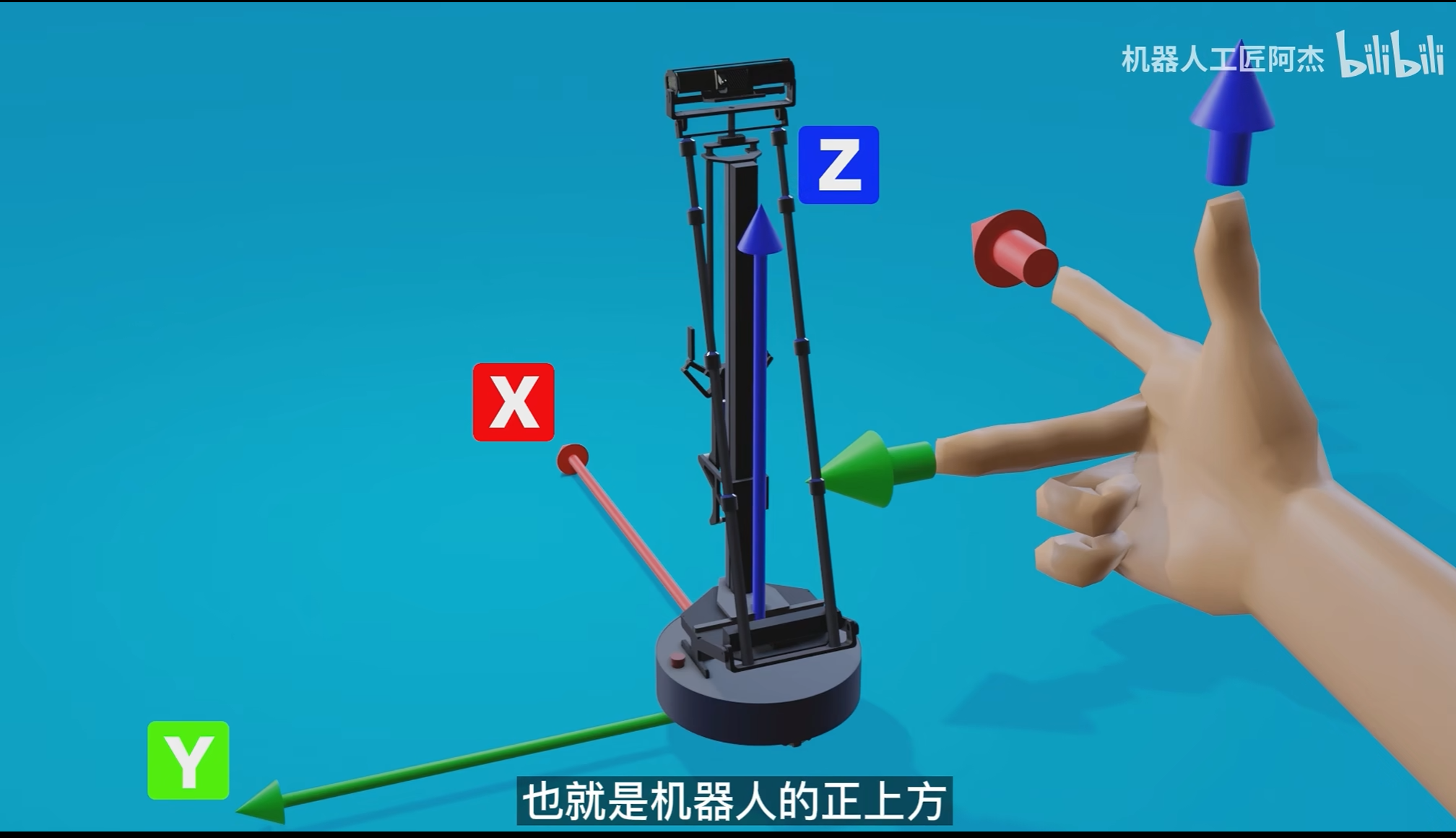
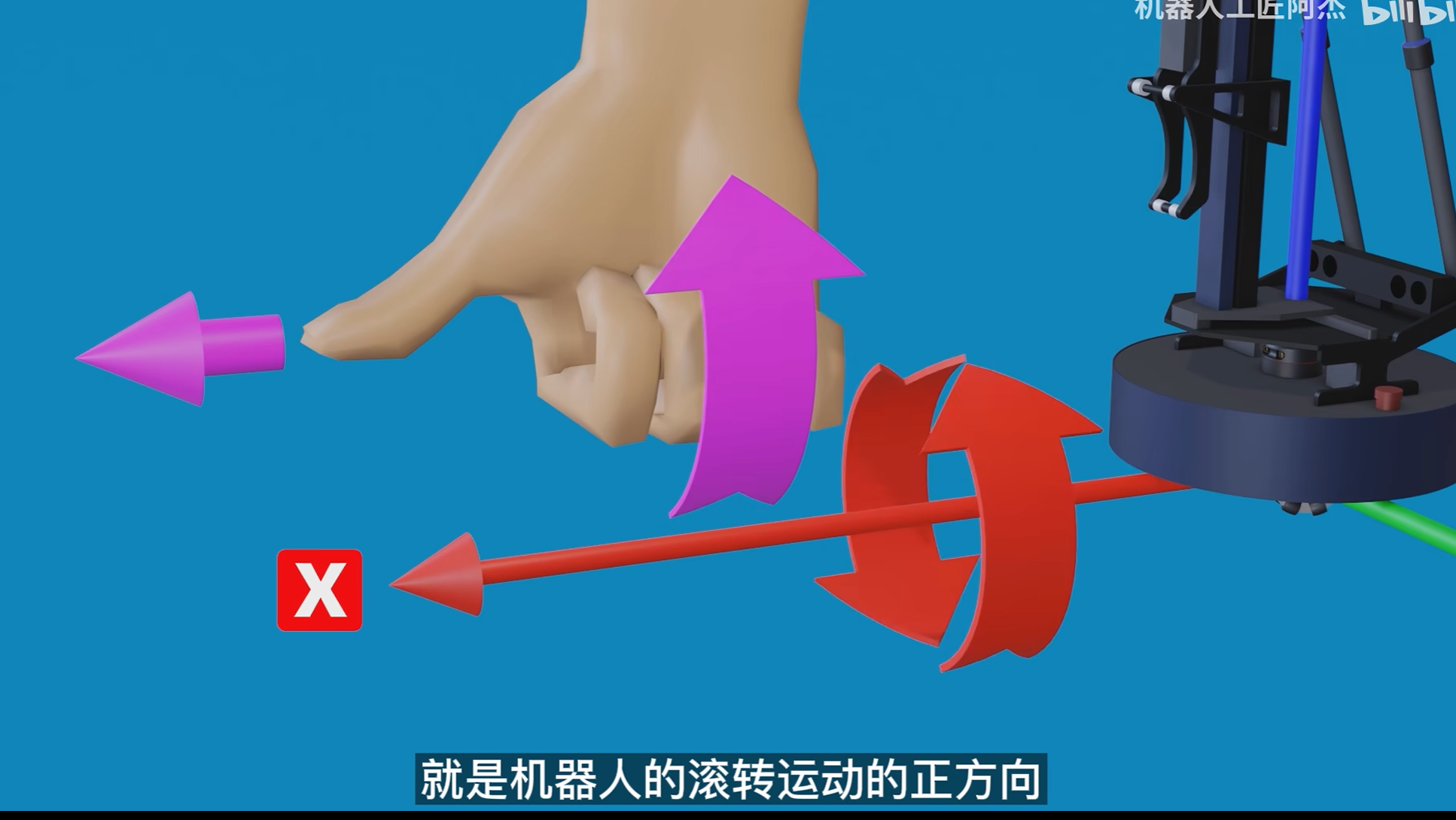
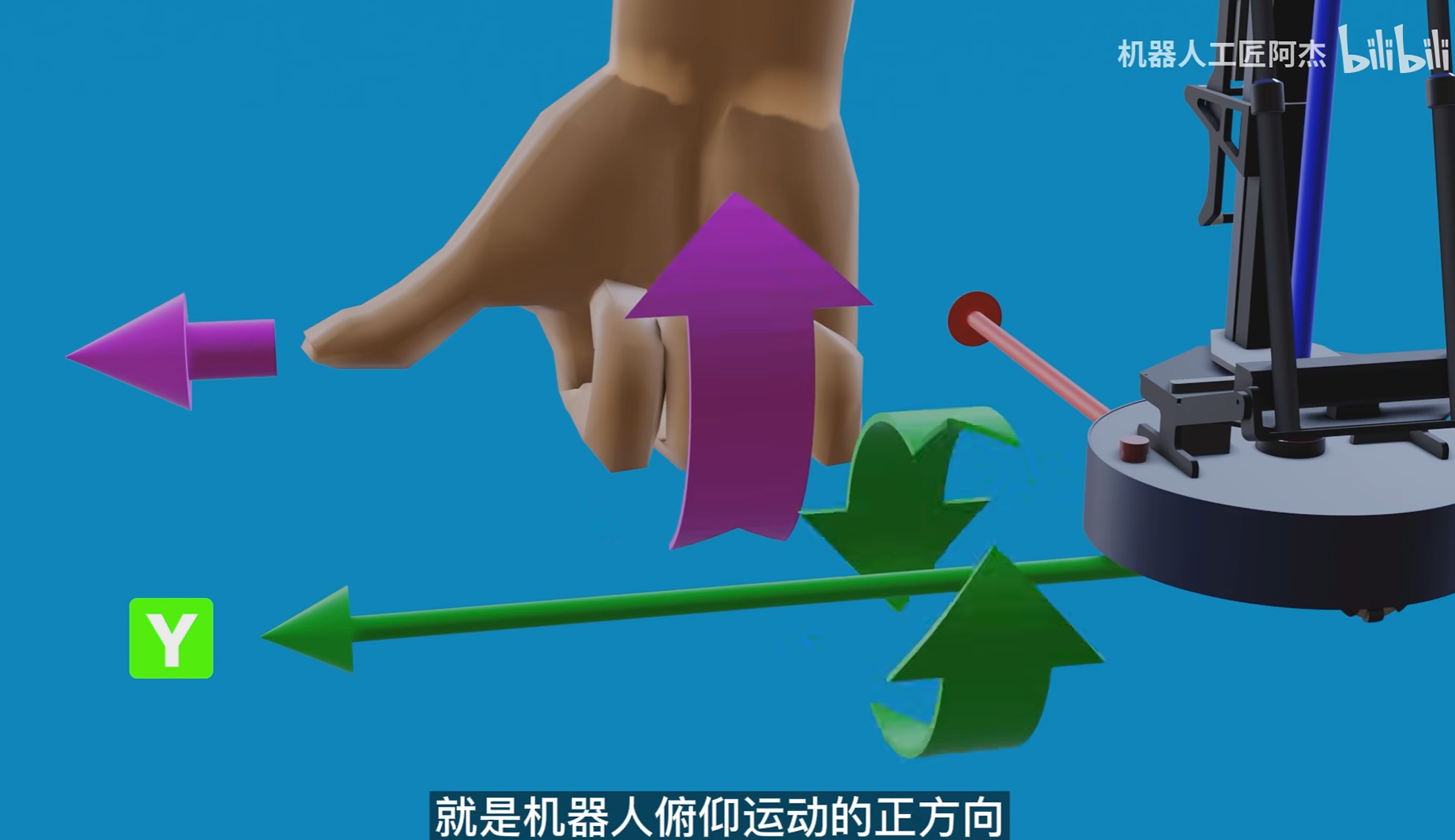
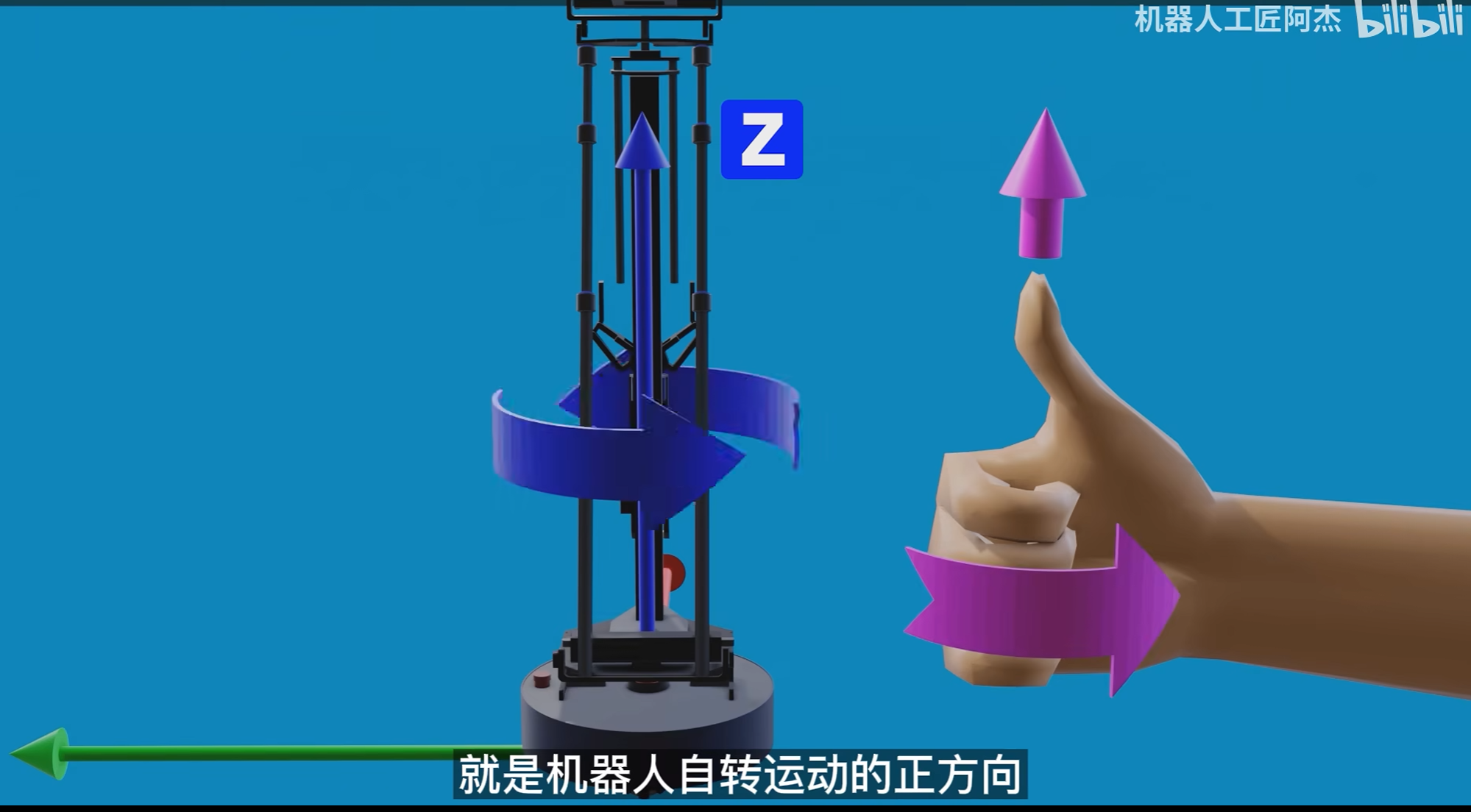
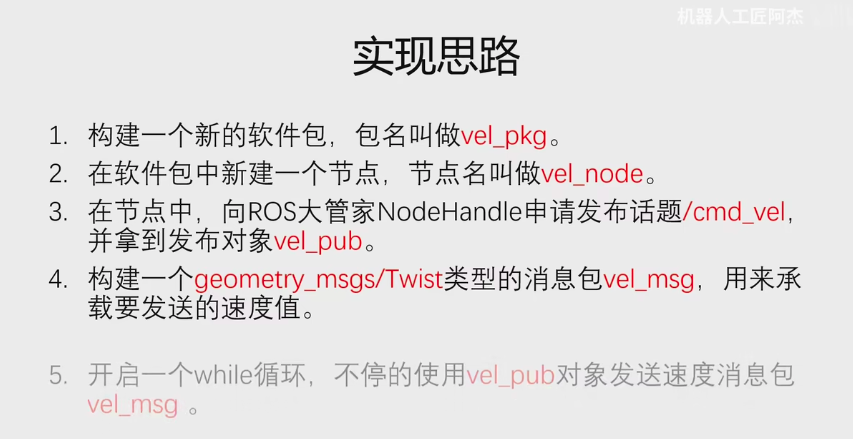
关键概念





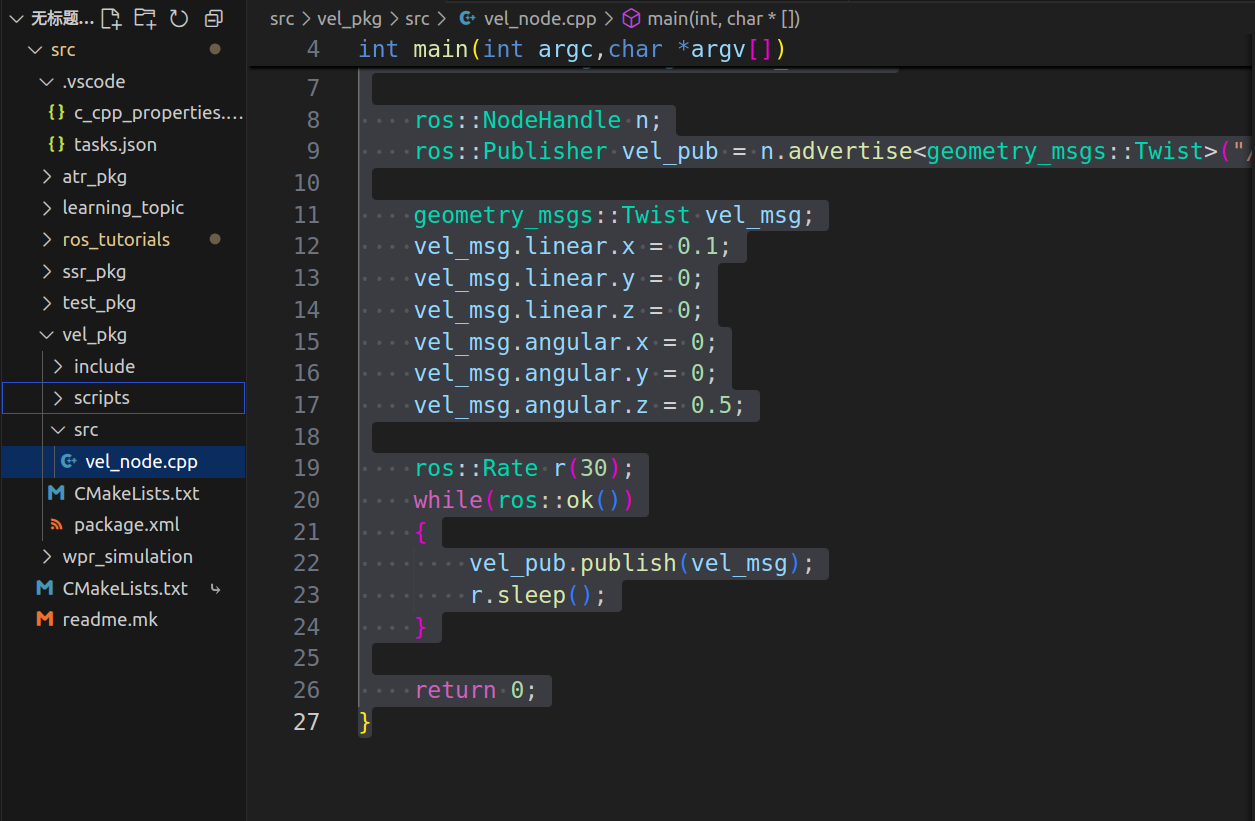
#include <ros/ros.h>
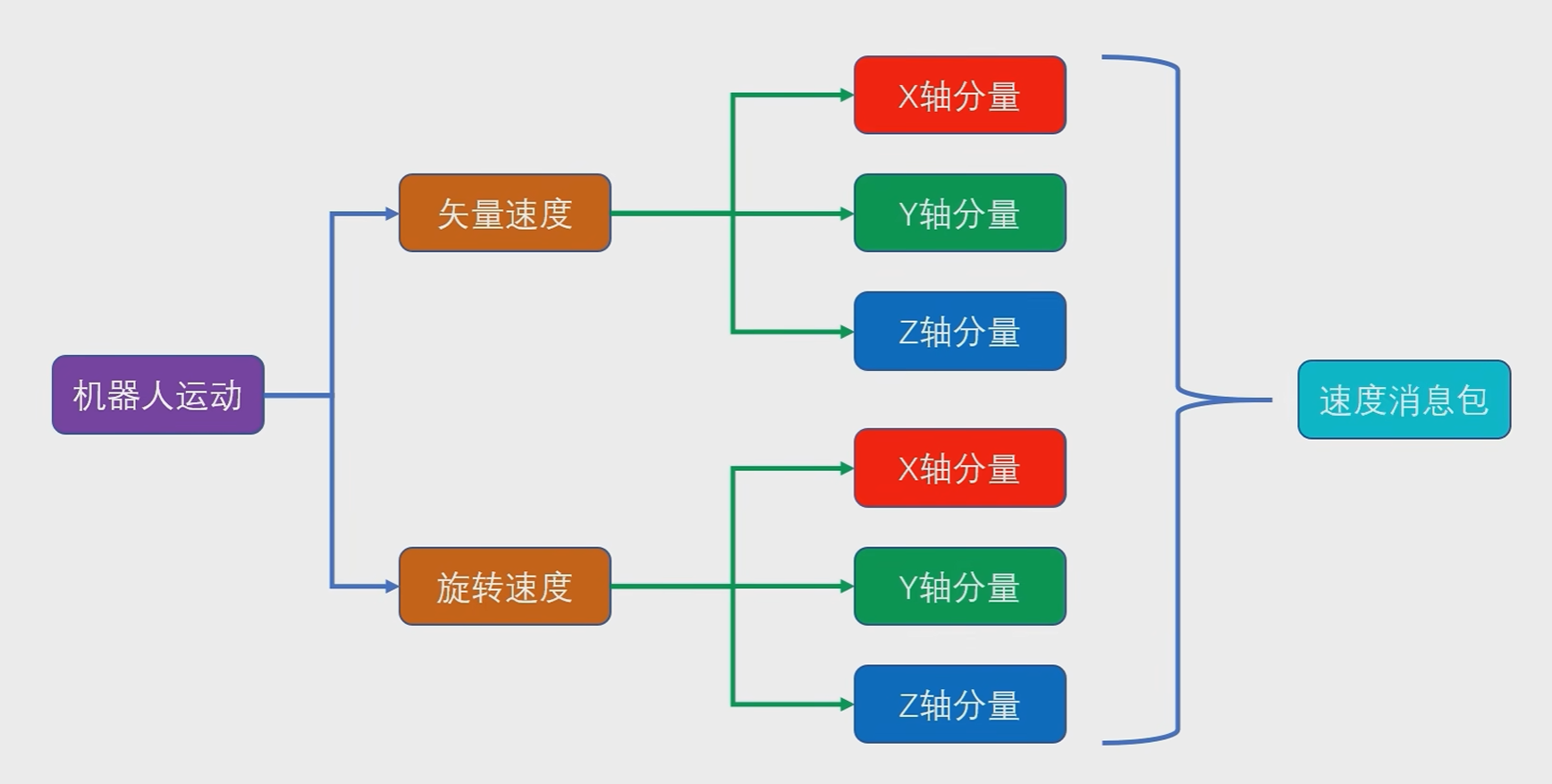
#include <geometry_msgs/Twist.h>int main(int argc,char *argv[])
{ros::init(argc ,argv ,"vel_node");ros::NodeHandle n;ros::Publisher vel_pub = n.advertise<geometry_msgs::Twist>("/cmd_vel",10);geometry_msgs::Twist vel_msg;vel_msg.linear.x = 0.1;vel_msg.linear.y = 0;vel_msg.linear.z = 0;vel_msg.angular.x = 0;vel_msg.angular.y = 0;vel_msg.angular.z = 0.5;ros::Rate r(30);while(ros::ok()){vel_pub.publish(vel_msg);r.sleep();}return 0;
}
**
- 如果创建的c++文件,需要配置 Cmakefile文件,在文件末尾添加:。
**
## Add folders to be run by python nosetests
# catkin_add_nosetests(test)add_executable(vel_node src/vel_node.cpp)
add_dependencies(vel_node ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
target_link_libraries(vel_node${catkin_LIBRARIES}
)
**
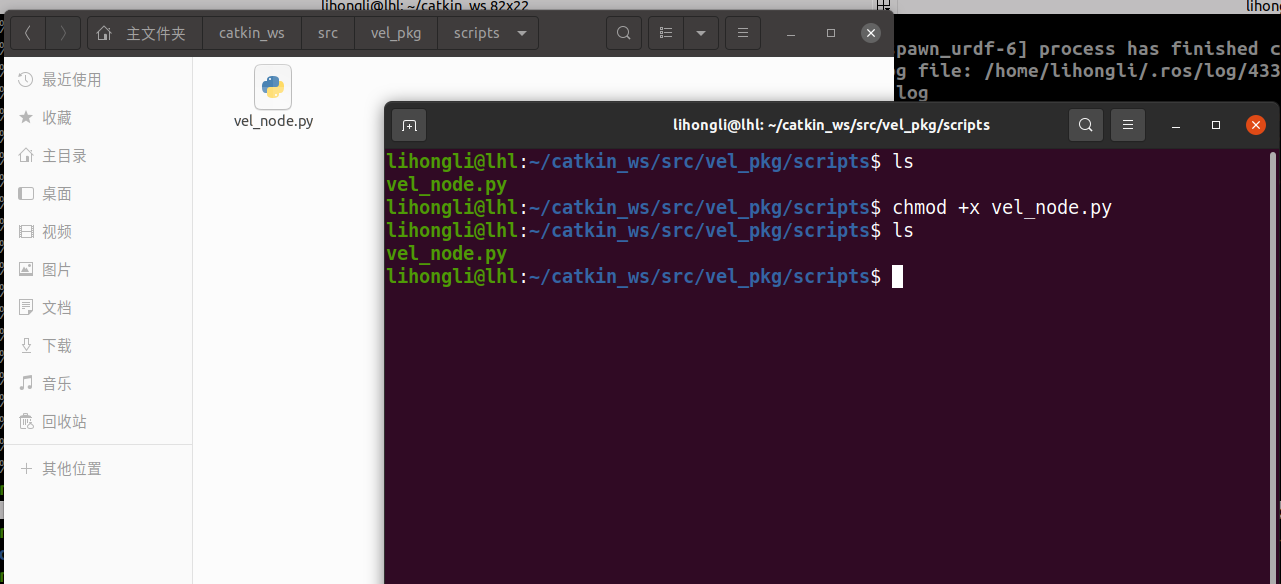
- 如果是创建的py文件,需要给程序赋予执行权限,可用ls查看,如果是白色则没有执行权限,如果是绿则有。。
**