【一分钟教程】用ZMC600E实现关节机器人±180度精准转动
一分钟速览:从设备连接到编程控制,演示关节机器人的±180度精准转动。
关节机器人±180度转动例程
在科技高度发达今天,越来越多的智能机器人进入我们的日常生活中。究竟这些机器人是如何实现运动?工程师又是如何精准而实时的控制它们的“手脚”,从而完成各种高难度动作的?今天我们就用ZLG致远电子的ZMC600E做一个控制机器人运动的例程,实现一个关节机器人±180度的来回转动。

1. 连接设备
通过ZMC600E专用的主站通信口,使用以太网连接从站设备,其他普通网口接入用户电脑。这样,通信设备就连接完成了。

2. 配置通信设备
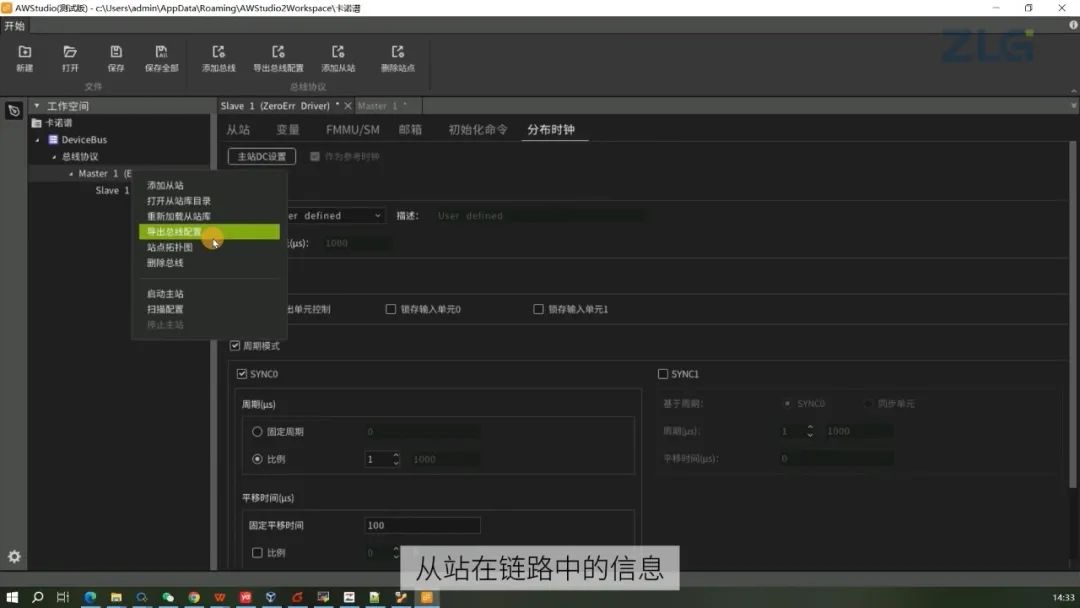
为了让主站识别从站在链路中的信息以及传输数据内容,我们需要进行以下配置:
- 设备识别:通过扫描或手动配置,确保主站能够识别所有从站设备。
- DC时钟同步:设置DC时钟同步,通常选择第一个从站设备作为时钟源。
- 通信周期:设置通信周期,最小可以设置到500微秒,确保数据传输的实时性。
- 数据映射:配置数据映射,确保主站能够正确读取和写入从站的数据,例如目标位置和实际位置。
到这里,机器人已经完成了初始化。
3. 编写程序
为了让机器人完成180度来回转动,我们需要编写一些程序来实现控制过程。这里我们使用C++进行编程。以下是一个简单的示例代码:
#include<iostream> #include<ZMC600E.h> // 假设ZMC600E提供了相应的C++库intmain(){ // 初始化ZMC600E控制器 ZMC600E controller; controller.initialize(); // 设置目标位置 int targetPosition = 180; // 180度 controller.setTargetPosition(targetPosition); // 启动运动 controller.startMotion(); // 等待运动完成 while (!controller.isMotionComplete()) { // 可以在这里添加一些状态检查或日志输出 } // 停止运动 controller.stopMotion(); std::cout << "运动完成!" << std::endl; return0; }
4. 编译与执行
最后一步是编译程序,让机器人读懂我们的指令并执行。从效果来看,关节机器人完美地完成了±180度的旋转运动。

操作步骤中的细节
- 多个设备配置:通过扫描或手动配置,确保主站能够识别所有从站设备。
- DC时钟同步:设置DC时钟同步,通常选择第一个从站设备作为时钟源。
- 通信周期:设置通信周期,最小可以设置到250微秒,确保数据传输的实时性。
- 多轴同步运动:实现更复杂的多轴同步运动,可以调用我们提供的运动学算法库。
如果您对ZMC600E的性能或这个应用有任何想法,欢迎在评论区留言探讨。