[激光原理与应用-182]:测量仪器 - 光束型 - 光束质量分析仪
光束质量分析仪是用于精确评估激光光束特性的核心设备,通过测量光束的强度分布、相位分布、发散角等参数,为激光系统的优化、加工工艺控制及科研实验提供关键数据支持。
以下是光束质量分析仪的详细解析:
一、核心功能 - 光束强度分布分析
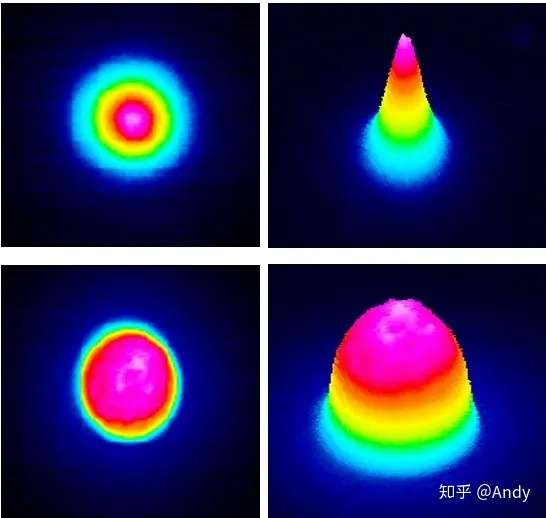
- 测量内容:获取光束在横截面上的能量分布(如高斯分布、平顶分布、多模分布等)。
- 应用场景:判断激光模式(TEM₀₀基模或多模)、优化谐振腔设计、调整光束整形器件(如扩束镜、透镜组)。
光束强度分布是描述激光或其他光束在横截面上能量(或光强)随空间位置变化的函数,是光束质量评估、光学系统设计和应用优化的核心参数。以下从定义、理论模型、测量方法、影响因素及应用场景五个方面展开解析:
1.1、定义与物理意义
- 定义:
- 光束强度分布(Beam Intensity Profile)指光束横截面上单位面积的光功率(或光强)随坐标(x,y)的变化关系,通常表示为 I(x,y)。
- 对于旋转对称光束(如TEM₀₀模),可简化为径向分布 I(r),其中 r=x2+y2。
- 物理意义:
- 反映光束的能量集中度:中心强度高、边缘衰减的光束(如高斯分布)能量集中;均匀分布的光束(如平顶光束)能量分散。
- 决定光束与物质相互作用的特性:如切割深度、焊接熔宽、粒子囚禁效率等。
1.2、理论模型:常见光束强度分布类型
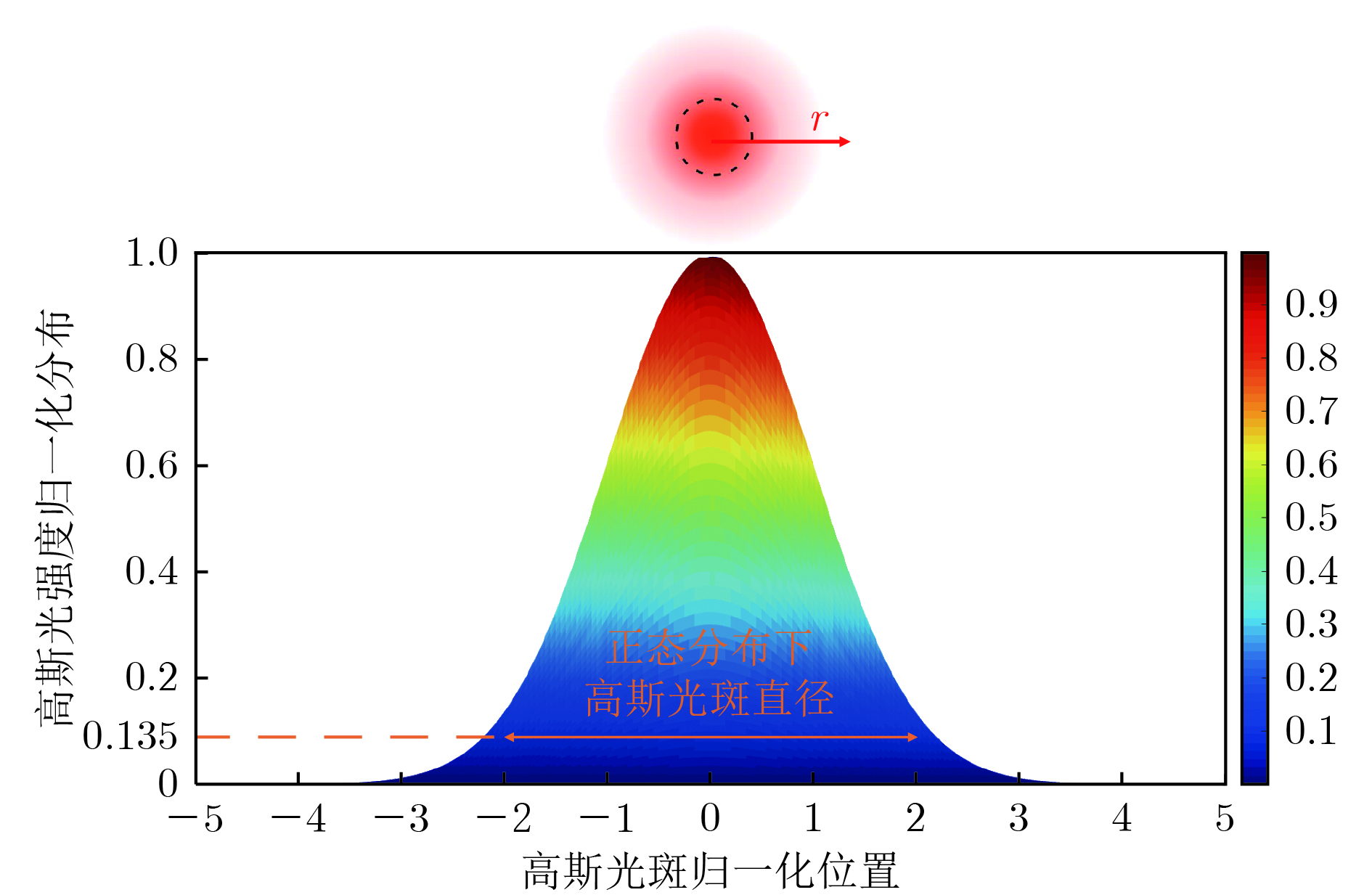
1. 高斯分布(TEM₀₀模)
数学表达式:
I(r)=I0exp(−w022r2)
其中:
- I0 为束腰中心光强,
- w0 为束腰半径,
- r 为径向坐标。
- 特点:
- 强度随半径平方指数衰减,边缘光强趋近于零。
- 能量集中在中心区域(约95%能量在 2w0 直径内)。
- 适用于单模激光(如He-Ne激光、光纤激光器基模输出)。
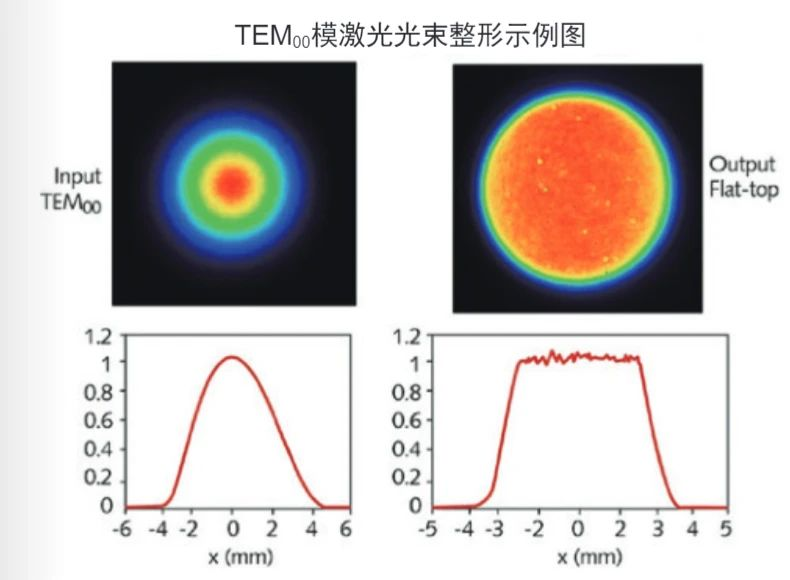
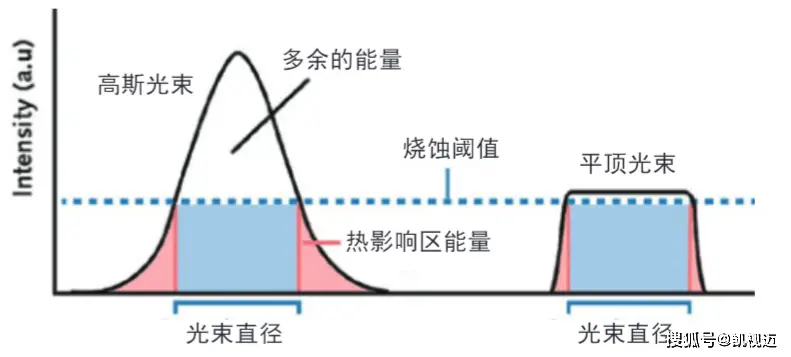
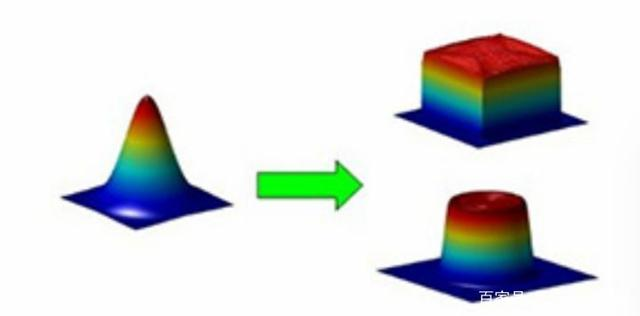
2. 平顶分布(Top-Hat Profile)
数学表达式:
I(r)={I00if r≤Rif r>R
其中 R 为光束半径。
- 特点:
- 强度在中心区域均匀,边缘锐截止。
- 能量利用率高(无边缘衰减),但实际中难以实现完全平顶。
- 适用于激光加工(如均匀切割、焊接)和光学镊子。
3. 环形分布(Doughnut Profile)
数学表达式:
I(r)=I0⋅w02r2exp(−w02r2)
(拉盖尔-高斯模的特例)
- 特点:
- 中心光强为零,强度在环形区域最大。
- 适用于光学涡旋(如轨道角动量光束)和粒子旋转操控。
4. 多模分布(Higher-Order Modes)
- 数学表达式:
由多个高斯模叠加而成,如厄米-高斯模(矩形对称)或拉盖尔-高斯模(圆柱对称)。
例如,TEM₁₀模:
I(x)∝x2exp(−w022x2)
- 特点:
- 强度分布出现多峰或复杂结构(如十字形、环形加中心斑)。
- 常见于多模激光器或腔模失配的光束。
1.3、测量方法
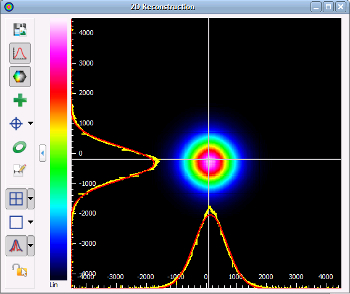
1. CCD/CMOS成像法
- 原理:
- 用相机直接捕获光束横截面图像,通过软件分析像素灰度值(与光强成正比)。
- 步骤:
- 扩展光束至相机感光面(避免饱和)。
- 采集多帧图像,取平均值减少噪声。
- 拟合强度分布曲线(如高斯拟合)。X和Y轴两个方向。
- 优点:
- 非接触、实时、可视化。
- 适用于动态光束监测(如光束漂移)。
- 缺点:
- 需校准像素尺寸与实际尺寸的对应关系。
- 高功率光束需衰减片防止相机损坏。
2. 刀口法(Knife-Edge Method)
- 原理:
- 用锐利刀片横向切割光束,测量光功率随刀片位置的变化,反推强度分布。
- 步骤:
- 固定激光器,移动刀片逐步遮挡光束。
- 记录光功率 P 随刀片位置 x 的变化曲线。
- 对 dP/dx 求导得到强度分布 I(x)。
- 优点:
- 简单、成本低,适用于高功率光束。
- 可直接测量一维强度分布。
- 缺点:
- 需手动操作,精度受刀片锐度影响。
- 无法直接获取二维分布(需旋转刀片多次测量)。
3. 扫描探针法(Scanning Probe Method)
- 原理:
- 用光电探针(如光电二极管)在光束横截面上扫描,记录光强随位置的变化。
- 步骤:
- 固定探针,移动激光器或反射镜使光束扫描过探针。
- 记录探针输出信号随时间的变化。
- 转换为空间分布,拟合强度参数。
- 优点:
- 适用于高功率激光(探针可远离光束中心)。
- 可测量超快光束(需高速探针)。
- 缺点:
- 机械扫描速度慢,可能引入振动误差。
- 需精确控制扫描路径。
1.4、影响因素
- 激光模式:
- 单模激光(TEM₀₀)为高斯分布,多模激光为复杂分布(如多峰、环形)。
- 模式纯度越高,强度分布越接近理论模型。
- 光学元件损伤:
- 高功率光束中,光学元件(如透镜、镜片)的损伤可能导致强度分布畸变(如中心凹陷)。
- 像差与波前畸变:
- 透镜像差(如球差、色差)会破坏高斯分布的对称性。
- 自适应光学可校正波前畸变,优化强度分布。
- 非线性效应:
- 高功率下,克尔效应或自聚焦效应可能改变强度分布(如光束自收缩或分裂)。
1.5、应用场景
- 激光加工:
- 切割/焊接:高斯分布光束的能量集中,适合精细加工;平顶分布光束适合大面积均匀处理。
- 钻孔:环形分布光束可实现高深径比微孔加工。
- 光学测量:
- 干涉仪:强度分布均匀性影响干涉条纹对比度。
- 全息术:平顶分布光束可提高全息图信噪比。
- 生物医学:
- 光学镊子:高斯分布光束用于囚禁微粒;环形分布光束用于旋转操控。
- 光热治疗:强度分布决定组织加热区域(如肿瘤靶向治疗)。
- 量子光学:
- 冷原子实验:高斯分布光束的强度梯度用于磁光阱中原子冷却与囚禁。
- 光子纠缠:强度分布影响双光子干涉可见度。
1.6、实际案例:高斯光束强度分布的测量与验证
案例1:He-Ne激光器(632.8 nm)
- 测量步骤:
用扩束镜将光束扩展至CCD感光面(直径约5 mm)。
采集图像并拟合高斯曲线:
I(r)=I0exp(−w022r2)
- 测得束腰半径 w0=150μm,中心光强 I0=10mW/cm2。
- 验证:
计算理论发散角:
θ=πw0λ=π×150×10−6632.8×10−9≈1.35mrad
- 与实际测量发散角(1.4 mrad)吻合,验证高斯分布假设。
案例2:光纤激光器平顶光束生成
- 方法:
- 在光纤激光器输出端插入衍射光学元件(DOE),将高斯分布转换为平顶分布。
- 效果:
- 平顶光束直径 2R=1mm,边缘锐度 < 5%。
- 应用于太阳能电池焊接,熔宽均匀性提升30%。
二、TEM₀₀基模或多模
TEM₀₀基模和多模是激光光束的两种基本模式类型,它们在光束特性、应用场景及测量方法上存在显著差异。以下是详细解析:
2.1、TEM₀₀基模:理想高斯光束
1. 定义与特性
- 模式定义:TEM₀₀(Transverse Electromagnetic Mode)是激光谐振腔中最低阶的横模,其电场和磁场在横截面上呈高斯分布,无任何节点或暗环。
- 核心特性:
- 光束强度分布:中心强度最高,向边缘呈指数衰减,形成典型的高斯轮廓。
- 光束宽度:在束腰处(最小截面)的光束直径最小,且沿传播方向按双曲线规律发散。
- M²因子:理论上M²=1(实际因光学元件缺陷可能略大于1),表示光束质量接近理想。
- 相位分布:波前为平面波(在束腰处)或球面波(远离束腰),相位畸变极小。
2. 优势与应用
- 优势:
- 高聚焦性:可聚焦到极小光斑(如衍射极限光斑),适用于高精度加工。
- 低发散角:长距离传输时能量集中,减少损耗。
- 稳定性高:模式纯净,抗干扰能力强。
- 典型应用:
- 激光切割/焊接:高能量密度实现精密加工(如薄板切割、微焊接)。
- 激光打标:生成清晰、高对比度的标记。
- 光学测量:作为标准光束校准光学系统。
- 科研领域:如冷原子实验、量子光学研究等。
3. 测量与评估
- 光束质量分析仪:
- 强度分布测量:通过CCD或CMOS相机捕获光束横截面图像,拟合高斯曲线计算束腰直径。
- M²因子测试:沿光束传播方向多点测量束腰直径与发散角,计算M²值(越接近1越好)。
- 波前传感器:检测相位分布,确认无显著畸变。
2.2、多模:复杂光束的混合态
1. 定义与特性
- 模式定义:多模指光束中同时存在多个横模(如TEM₀₁、TEM₁₀、TEM₁₁等)的叠加,形成复杂强度分布。
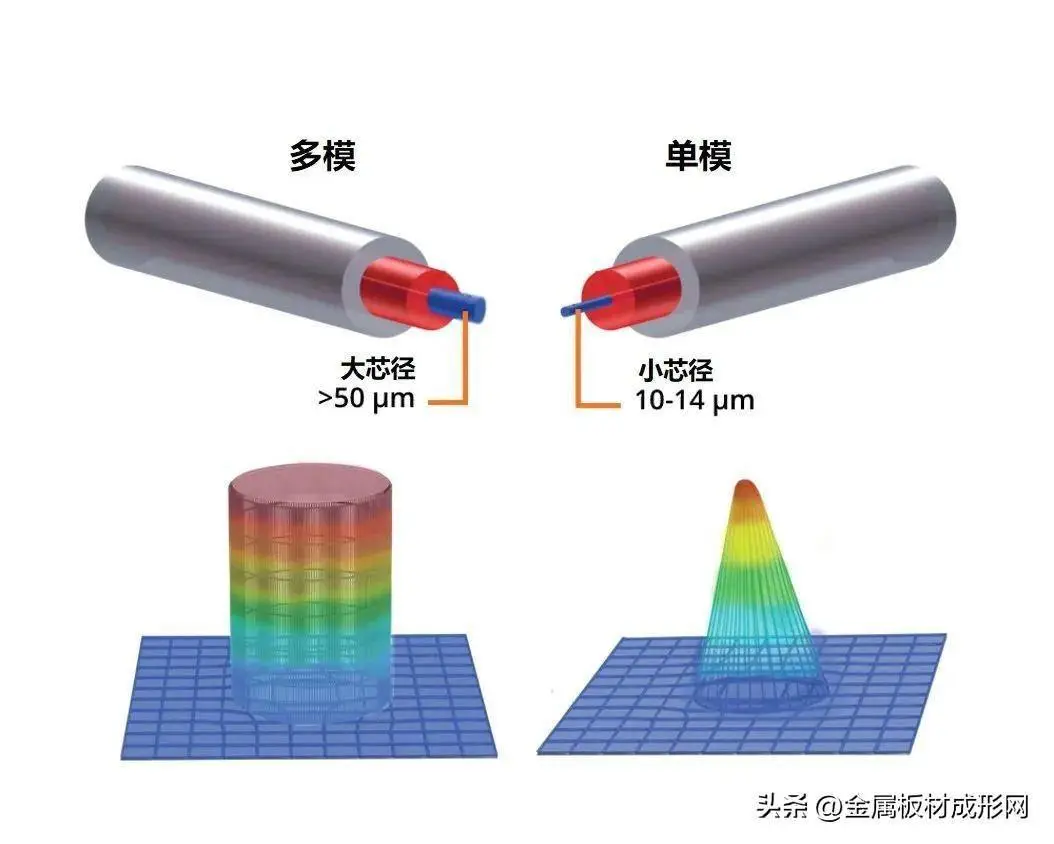
- 核心特性:
- 光束强度分布:中心可能存在多个峰值或暗环,轮廓不规则(如平顶分布、环形分布等)。
- 光束宽度:束腰直径通常大于同功率的TEM₀₀模,且发散角更大。
- M²因子:M²>1(数值越大表示光束质量越差,越远离理想的高斯光束TEM₀₁),因模式混合导致能量分散。
- 相位分布:波前存在显著畸变,可能包含像差或高阶相位项。
2. 优势与应用
- 优势:
- 高功率输出:多模激光器(如光纤激光器)可通过模式混合提升总功率。
- 均匀能量分布:平顶多模光束适用于大面积均匀加工(如表面处理、涂层固化)。
- 成本较低:多模激光器结构简单,易于大规模生产。
- 典型应用:
- 激光焊接(厚板):多模光束的较大光斑和深熔池提高焊接效率。
- 激光熔覆:平顶分布实现均匀涂层沉积。
- 材料处理:如激光清洗、表面改性等。
- 医疗美容:如激光脱毛、皮肤再生等(需控制光斑均匀性)。
3. 测量与评估
- 光束质量分析仪:
- 强度分布测量:捕获光束横截面图像,分析模式成分(如通过傅里叶变换分解横模)。
- M²因子测试:沿传播方向多点测量,计算综合M²值(通常>5)。
- 波前传感器:检测复杂相位畸变,评估模式混合程度。
- 挑战:
- 模式分解复杂:需高级算法(如模式匹配法)区分多个横模。
- 动态变化监测:多模光束可能随时间或环境变化(如温度漂移导致模式竞争)。
2.3、TEM₀₀基模与多模的对比总结
| 特性 | TEM₀₀基模 | 多模 |
|---|---|---|
| 强度分布 | 高斯分布(单峰) | 复杂分布(多峰、环形、平顶等) |
| 光束宽度 | 最小(衍射极限) | 较大(模式混合导致) |
| 发散角 | 小(准直性好) | 大(能量分散) |
| M²因子 | ≈1(理想) | >1(通常>5) |
| 聚焦能力 | 极强(可聚焦到微米级) 中心点的能量极高 | 较弱(光斑较大) |
| 功率容量 | 较低(高功率易损坏光学元件) | 高(适合千瓦级激光) |
| 应用场景 | 精密加工、科研、测量 | 厚板焊接、大面积处理、工业制造 |
| 测量难度 | 较低(标准高斯拟合) | 较高(需模式分解算法) |
2.4、选型建议:根据需求选择模式
- 追求高精度/小光斑:
- 优先选择TEM₀₀基模激光器(如固体激光器、半导体激光器)。
- 配合光束质量分析仪严格监控M²因子,确保模式纯净。
- 需要高功率/大面积加工:
- 选择多模激光器(如光纤激光器、CO₂激光器)。
- 通过光束整形器(如扩束镜、平顶转换器)优化能量分布。
- 平衡成本与性能:
- 中低功率应用可考虑部分相干光源(如多模半导体激光器),兼顾成本与效率。
2.5、未来趋势:模式控制技术
- 自适应光学:
- 通过变形镜实时补偿波前畸变,将多模光束转换为近TEM₀₀模。
- 模式选择腔:
- 设计特殊谐振腔结构(如非稳腔、偏振选择腔),强制输出单一横模。
- 相干合成技术:
- 将多个多模激光束通过相位锁定合成高功率TEM₀₀模光束。
三、核心功能 - 光束宽度(束腰直径)
光束宽度(束腰直径)是描述激光光束在横截面上最小尺寸的核心参数,尤其在TEM₀₀基模中,它直接决定了光束的聚焦能力、能量密度和传播特性。
以下是关于光束宽度(束腰直径)的详细解析:
3.1、定义与物理意义
- 定义:
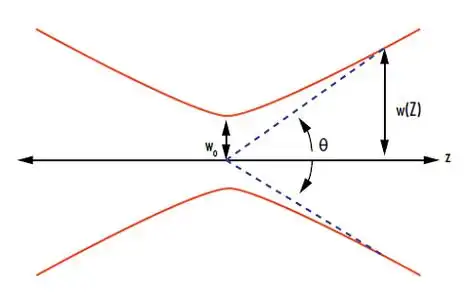
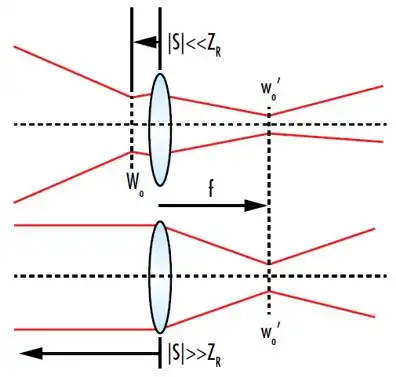
- 束腰直径(Beam Waist Diameter, 2w0):指激光光束在传播方向上横截面最小处的直径,即光束最细的位置(焦点的位置)。
- 束腰半径(w0):束腰直径的一半,是国际标准中更常用的参数。
- 物理意义:
- 束腰是光束的“聚焦点”,其尺寸决定了光束的能量集中度。
- 在束腰处,光束的发散角最小,波前为平面波(理想情况下),是光束质量评估的关键参考点。
3.2、TEM₀₀基模中的束腰直径
- 高斯光束特性:
- TEM₀₀模的光束强度呈高斯分布,束腰处的光强最大,向边缘按指数衰减。
- 束腰直径是光束的“最小可实现尺寸”,受衍射极限限制。
- 计算公式:
束腰半径 w0 与激光谐振腔参数的关系:
w0=πλL⋅g1+g2−2g1g2g2
其中: |
- $\lambda$ 为激光波长, |
- $L$ 为谐振腔长度, |
- $g_1, g_2$ 为谐振腔的几何参数($g_i = 1 - \frac{L}{R_i}$,$R_i$ 为腔镜曲率半径)。 |
简化公式(对称共焦腔):
w0≈πλL
此时束腰位于谐振腔中心,尺寸最小。 |
3. 实际测量中的近似:
- 通过光束质量分析仪测量光束强度分布,拟合高斯曲线,直接读取束腰直径(2w0)。
- 常用方法:刀口法、CCD成像法、移动探针法等。
3.3、束腰直径的影响因素
- 激光波长(λ):
- 波长越长,束腰直径越大(衍射效应增强),波长越小,粒子性越强,束腰直径越小。
- 例如:CO₂激光(10.6 μm)的束腰通常比Nd:YAG激光(1.06 μm)更粗。
- 谐振腔设计:
- 腔长(L):腔长越长,束腰直径越大(光束有更多空间发散)。
- 腔镜曲率(R):曲率半径越小,束腰越细(光束被更强聚焦)。
- 模式选择元件:如孔径光阑、偏振片可抑制高阶模,维持TEM₀₀模的细束腰。
- 光学元件损伤:
- 高功率激光中,光学元件(如透镜、镜片)的损伤阈值限制了束腰的最小尺寸。
- 束腰过细会导致局部功率密度过高,可能损坏元件。
3.4、束腰直径的测量方法
- 刀口法(Knife-Edge Method):
- 原理:用锐利刀片横向切割光束,测量光强随刀片位置的变化,拟合高斯曲线确定束腰。
- 步骤:
- 固定激光器,移动刀片逐步遮挡光束。
- 记录光功率随刀片位置的变化曲线。
- 拟合曲线得到束腰半径 w0。
- 优点:简单、成本低。
- 缺点:需手动操作,精度受刀片锐度影响。
- CCD成像法:
- 原理:用CCD或CMOS相机捕获光束横截面图像,通过软件分析强度分布。
- 步骤:
- 将激光聚焦到CCD感光面。
- 采集多帧图像,取平均值减少噪声。
- 拟合高斯曲线,计算束腰直径。
- 优点:非接触、自动化、可实时监测。
- 缺点:需校准相机像素尺寸与实际尺寸的对应关系。
- 移动探针法(Scanning Probe Method):
- 原理:用光电探针(如光电二极管)在光束横截面上扫描,测量光强分布。
- 步骤:
- 固定探针,移动激光器或反射镜使光束扫描过探针。
- 记录探针输出信号随时间的变化。
- 转换为空间分布,拟合束腰参数。
- 优点:适用于高功率激光(探针可远离光束中心)。
- 缺点:机械扫描速度慢,可能引入振动误差。
3.5、束腰直径的应用场景
- 激光加工:
- 切割/焊接:细束腰(微米级)可实现高精度加工(如半导体晶圆切割)。
- 打标:束腰直径决定标记线条的粗细(如二维码的最小尺寸)。
- 光学测量:
- 干涉仪:束腰作为参考光束,其尺寸影响干涉条纹的对比度。
- 全息术:细束腰可提高全息图的分辨率。
- 科研领域:
- 冷原子实验:束腰直径决定原子囚禁区域的体积(如磁光阱的尺寸)。
- 量子光学:束腰与光子模式体积相关,影响光与物质相互作用效率。
3.6、束腰直径的优化策略!!!!!!!!!!
- 缩短谐振腔长:
- 减少腔长 L 可直接减小束腰直径(但需平衡腔稳定性)。
- 使用小曲率半径腔镜:
- 选择曲率半径 R 较小的腔镜,增强光束聚焦效果。
- 插入模式选择元件:
- 在腔内放置孔径光阑或偏振片,抑制高阶模,维持TEM₀₀模的细束腰。
- 自适应光学补偿:
- 用变形镜实时校正波前畸变,优化束腰尺寸和形状。
3.7、实际案例:束腰直径的计算与测量
案例1:He-Ne激光器(632.8 nm)
谐振腔长 L=30 cm,腔镜曲率 R1=R2=1 m。
计算 g1=g2=1−10.3=0.7。
代入公式:
w0=π632.8×10−9×0.3⋅0.7+0.7−2×0.70.7≈160μm
(注:此例中分母为零,需用更精确的谐振腔理论计算,实际束腰可能更小。)
案例2:光纤激光器(1064 nm)
通过CCD测量束腰直径为 50μm。
计算发散角:
θ=πw0λ=π×25×10−61064×10−9≈13.5mrad
(发散角与束腰直径成反比,细束腰导致大发散角。)
四、核心功能 - 发散角
发散角:计算光束远场发散角,评估光束的准直性。
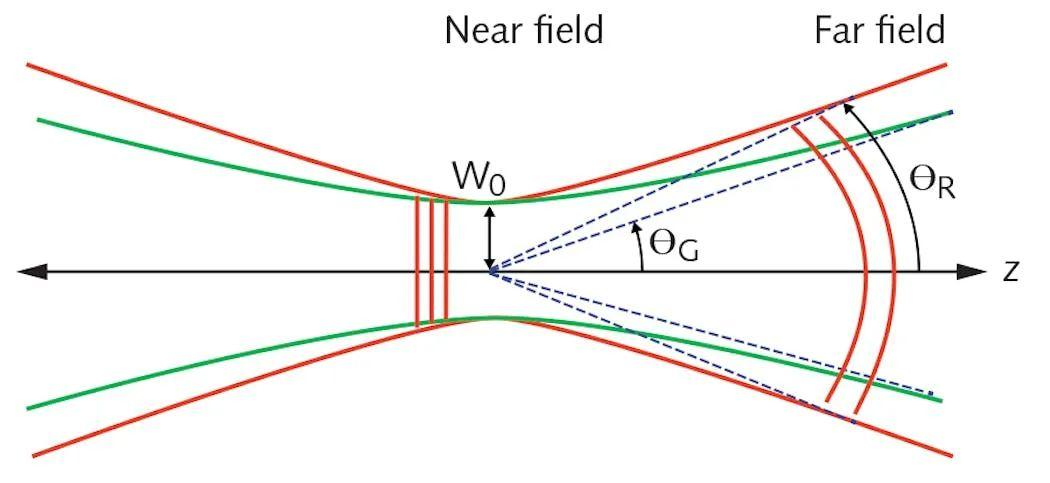
发散角(Divergence Angle)是描述光束在传播过程中空间扩展特性的关键参数,定义为光束远场(距离光源足够远)时,光强下降至中心最大值一定比例(如1/e²或半高宽)处的两条边界光线之间的夹角。它是评估激光、LED等光源方向性和能量集中度的重要指标,直接影响光学系统的设计(如聚焦、准直)和应用效果(如通信、加工、测量)。
4.1、发散角的定义与物理意义
- 定义:
数学表达:对于旋转对称光束(如高斯光束),发散角 θ 是光束在远场(z→∞)时,光强下降至中心最大值 I0 的 1/e2(约13.5%)处的半角宽度,即:
θ=z→∞limzw(z)
其中 $w(z)$ 是光束在距离 $z$ 处的半径。 |
- 几何意义:发散角越小,光束传播越接近平行,方向性越好;发散角越大,光束扩散越快。
- 物理意义:
- 能量集中度:发散角小意味着能量更集中于主瓣,适用于远距离传输(如激光通信、测距)。
- 系统设计约束:发散角限制了光学元件(如透镜、反射镜)的最小尺寸和焦距选择。
- 应用适配性:不同应用对发散角要求不同(如激光加工需小发散角实现精细聚焦,照明需大发散角实现均匀覆盖)。
4.2、发散角的理论模型与计算
1. 高斯光束(TEM₀₀模)
数学表达式:
高斯光束的发散角由束腰半径 w0 和波长 λ 决定:
θ=πw0λ
其中:
- λ 为光波波长,
- w0 为光束束腰半径(光强最大处半径)。
- 特点:
- 发散角与束腰半径成反比:束腰越细,发散角越大。
- 理论最小发散角受衍射极限约束(即无法通过缩小束腰无限减小发散角)。
2. 平顶光束(Top-Hat Profile)
数学表达式:
平顶光束的发散角需通过傅里叶变换或远场衍射理论计算。近似情况下,若光束直径为 D,则发散角可表示为:
θ≈Dλ
(与高斯光束类似,但系数可能因边缘锐度不同而变化)。
- 特点:
- 平顶光束的发散角通常略大于高斯光束(因边缘锐截止导致高频成分更多)。
3. 多模光束
数学表达式:
多模光束的发散角由模式混合决定,通常大于单模光束。例如,对于厄米-高斯模(TEMₘₙ),发散角可表示为:
θm,n=θ01+(2m+n)2
其中 θ0 为基模(TEM₀₀)发散角。
- 特点:
- 高阶模(m+n 越大)发散角越大,光束质量越差。
4.3、发散角的测量方法
1. 远场法(直接测量法)
- 原理:
在足够远的距离 z 处(满足 z≫πw02/λ),测量光束半径 w(z),通过 θ≈w(z)/z 计算发散角。 - 步骤:
固定激光器,在远场放置光屏或CCD相机。
测量光束直径 D(z)(如通过刀口法或图像处理)。
计算发散角:
θ=2zD(z)
- 优点:
- 简单直接,适用于低功率光束。
- 缺点:
- 需足够大的测量距离(实验室空间受限时难以实现)。
- 高功率光束可能损坏探测器。
2. 近场法(通过束腰与波长计算)
- 原理:
利用高斯光束发散角公式 θ=λ/(πw0),通过测量束腰半径 w0 和波长 λ 计算发散角。 - 步骤:
- 用CCD或扫描探针测量光束近场强度分布,拟合高斯曲线得到 w0。
- 已知波长 λ(如通过波长计测量),代入公式计算 θ。
- 优点:
- 无需远场测量,节省空间。
- 缺点:
- 仅适用于高斯或近似高斯光束。
- 束腰测量精度受探针分辨率限制。
3. 干涉法(高精度测量)
- 原理:
利用干涉仪(如马赫-曾德尔干涉仪)测量光束的波前曲率,反推发散角。 - 步骤:
- 将光束分为两束,一束直接传播,另一束经反射镜引入路径差。
- 调整路径差使两束光干涉,观察干涉条纹弯曲程度。
- 通过条纹弯曲量计算波前曲率,进而得到发散角。
- 优点:
- 精度高(可达亚毫弧度级)。
- 缺点:
- 系统复杂,需精密光学元件。
- 对环境振动敏感。
4.4、影响发散角的因素
- 光束模式:
- 单模光束(TEM₀₀)发散角最小,多模光束发散角随模式阶数增加而增大。
- 光学元件像差:
- 透镜的球差、色差会破坏光束波前,导致发散角增大。
- 自适应光学可校正像差,优化发散角。
- 非线性效应:
- 高功率下,克尔效应或自聚焦效应可能改变光束发散角(如光束自收缩导致发散角减小)。
- 热效应:
- 光学元件受热变形(如激光晶体热透镜效应)会改变光束参数,影响发散角。
4.5、发散角的应用场景与优化
1. 激光通信
- 需求:小发散角(<1 mrad)实现远距离传输(如卫星间通信)。
- 优化方法:
- 使用单模光纤输出高斯光束。
- 在发射端加入准直透镜(如非球面透镜)压缩发散角。
2. 激光加工
- 需求:适中发散角(1-10 mrad)平衡聚焦深度与能量密度。
- 优化方法:
- 选择多模激光器(如CO₂激光器)获得较大发散角,适应粗糙表面加工。
- 使用变焦光束扩束器动态调整发散角。
3. 光学测量
- 需求:极小发散角(<0.1 mrad)提高干涉仪分辨率。
- 优化方法:
- 使用超稳腔激光器(如He-Ne稳频激光器)输出低发散角光束。
- 在测量系统中加入空间滤波器(如针孔滤波)净化光束模式。
4.6、实际案例:高斯光束发散角的测量与验证
案例1:He-Ne激光器(632.8 nm)发散角测量
- 测量步骤:
用CCD测量近场光束强度分布,拟合高斯曲线得束腰半径 w0=150μm。
已知波长 λ=632.8nm,计算理论发散角:
θ=πw0λ=π×150×10−6632.8×10−9≈1.35mrad
在远场(z=10m)测量光束直径 D=2.7cm,计算实验发散角:
θexp=2zD=2×100.027=1.35mrad
- 结论:
理论与实验结果一致,验证高斯光束发散角公式。
案例2:光纤激光器发散角优化
- 问题:
多模光纤激光器输出光束发散角过大(θ=10mrad),导致聚焦光斑尺寸大(d=100μm),无法满足微加工需求。 - 优化方案:
- 在光纤输出端熔接单模光纤(模式滤波),将光束转换为近似高斯分布。
- 加入准直透镜(焦距 f=100mm),压缩发散角至 θ′=1mrad。
- 聚焦后光斑尺寸减小至 d′=10μm,满足加工要求。
- 效果:
发散角降低10倍,聚焦光斑尺寸缩小10倍,加工精度显著提升。
五、核心功能 - M²因子
M²因子:量化光束质量,定义为实际光束与理想高斯光束的发散角与束腰直径乘积之比(M²≥1,越接近1表示光束质量越好)。
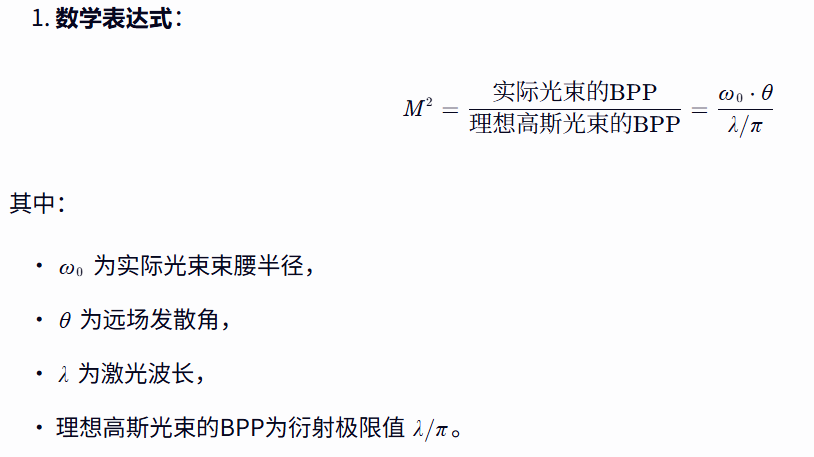
M²因子(光束质量因子)是激光领域用于量化激光光束质量的核心参数,定义为实际光束参数乘积(BPP)与理想基模高斯光束参数乘积的比值,其数值综合反映了光束的发散程度、聚焦性能及传输稳定性。以下是关键要点解析:
5.1、数学定义与物理意义
- 波长越大,束腰半径越大;束腰半径越大,发散性越大。
- 波长越大,发散角越大;发散角越大,发散性越大。
- 束腰半径越小,发散角越大;反之,束腰半径越大,发散角越小。
5.2、测量方法与标准
- ISO标准方法:
- 步骤:
- 使用高光学质量透镜聚焦激光束。
- 在束腰附近(5个位置)和远场(距离束腰至少一个瑞利长度的5个位置)测量光束宽度(D4σ法)。
- 将10个测量数据拟合到双曲线模型,计算 M2 值。
- 意义:确保测量结果的一致性和准确性,避免操作误差。
- 步骤:
- 常用测量技术:
- 相机式直接测量法:
- 设备:光束质量分析仪(如OPHIR BSQ-SP204S)。
- 优点:测量速度快(1分钟内完成),精度高。
- 局限:需光路衰减,无法直接测量1100nm以上波长。
- 狭缝扫描式测量法:
- 设备:狭缝扫描仪(如OPHIR NANOSCAN系列)。
- 优点:成本低,可直接测量高功率激光器,兼容多波长。
- 局限:搭建复杂,测量速度慢,对操作技能要求高。
- 相位测量法:
- 设备:波前传感器(如Phasics SID4系列)。
- 优点:直接测量波前相位,精度高,适用于复杂光束。
- 局限:设备成本较高。
- 相机式直接测量法:
5.3、影响因素与优化策略
- 影响因素:
- 光学元件缺陷:如透镜像差、表面粗糙度。
- 谐振腔设计:腔长、反射镜形状及材料质量。
- 环境因素:温度波动、空气流动、振动。
- 激光模式:多模光束的 M2 值显著高于单模。
- 优化策略:
- 元件优化:采用高精度光学加工技术,减少表面缺陷。
- 谐振腔改进:延长腔长、优化反射镜形状,提升模式稳定性。
- 环境控制:恒温恒湿、减震隔离,降低外部干扰。
- 模式选择:通过空间滤波或模式选择器抑制高阶模。
5.4、应用场景与工程价值
- 工业加工:
- 激光切割/焊接:M2 值越小,聚焦光斑越小,热影响区越窄,加工精度越高。例如,M2<1.2 的激光器适用于精密微加工。
- 3D打印:高光束质量(M2≈1)可实现层间高分辨率融合。
- 光学通信:
- 光纤耦合:单模光纤要求 M2≤1.1,以降低耦合损耗。
- 自由空间传输:低 M2 值可减少大气湍流引起的光束畸变。
- 激光雷达:
- 测距精度:M2 值越小,光束发散角越小,测距分辨率越高。
- 探测灵敏度:高光束质量可提升回波信号信噪比。
- 科研领域:
- 超快激光:M2 值影响脉冲时空耦合特性,需优化至接近衍射极限。
- 冷原子实验:高斯光束质量(M2≈1)是实现原子囚禁的关键条件。
5.5、局限性与发展趋势
- 局限性:
- 高能激光:非稳腔输出的离散能量分布光束可能导致 M2 计算误差超过20%。
- 超快脉冲:时空耦合效应可能使 M2 无法全面描述光束质量。
- 发展趋势:
- 多参数综合评价:结合环围能量比(BQ值)、斯特列尔比(S)等参数,构建更全面的光束质量评估体系。
- 智能化测量:利用机器学习算法自动优化测量参数,提升数据拟合效率。
- 新型激光器设计:通过拓扑优化谐振腔结构,实现 M2≈1 的高功率激光输出。
六、波长、发散角、束腰半径、发散性的关系
波长、发散角、束腰半径和发散性是描述激光光束传播特性的核心参数,它们之间通过衍射理论和几何光学紧密关联。以下是它们之间关系的系统性解析:
6.1、核心参数定义与物理意义
- 波长(λ):
- 定义:激光的电磁波波长,决定光束的衍射特性。
- 影响:波长越短,衍射效应越弱,光束可聚焦得更细;波长越长,衍射效应越强,光束发散角越大。
- 束腰半径(ω₀):
- 定义:光束横截面上光强最大处(束腰)的半径,通常指1/e²强度点。
- 影响:束腰半径越小,光束聚焦能力越强,但发散角越大;束腰半径越大,光束准直性越好,但聚焦光斑尺寸受限。
- 发散角(θ):
- 定义:光束远场(距离束腰足够远)的传播角度,通常指半角全宽(FWHM)或1/e²强度角。
- 影响:发散角越小,光束传播距离越远;发散角越大,光束能量扩散越快。
- 发散性:
- 广义定义:光束在传播过程中扩散的能力,由发散角和光束能量分布共同决定。
- 量化指标:常用发散角、光束参数乘积(BPP)或M²因子(光束质量因子)表征。
6.2、数学关系:高斯光束理论
对于理想基模高斯光束(M²=1),参数间关系由以下公式描述:
发散角与束腰半径的关系:
θ=πω0λ
- 物理意义:发散角与波长成正比,与束腰半径成反比。束腰越小,发散角越大;波长越长,发散角越大。
光束参数乘积(BPP):
BPP=ω0⋅θ=πλ
- 意义:BPP是衍射极限的标志,实际光束的BPP均大于或等于此值(M² ≥ 1)。
M²因子与发散性的关系:
M2=理想高斯光束的BPP实际光束的BPP=λ/πω0⋅θ实际
- 意义:M²因子综合反映了光束的发散性。M²=1表示衍射极限光束,M²>1表示光束质量下降,发散性增强。
6.3、参数间的相互影响与权衡
- 波长与发散角、束腰半径的权衡:
- 短波长激光(如紫外、可见光):
- 优势:衍射极限小,可聚焦到更细的光斑(如激光微加工)。
- 局限:材料吸收率高,可能引发热损伤;大气散射较强(如紫外激光在空气中衰减快)。
- 长波长激光(如红外、CO₂激光):
- 优势:衍射极限大,光束发散角较小,适合长距离传输(如激光通信)。
- 局限:聚焦光斑较大,功率密度受限。
- 短波长激光(如紫外、可见光):
- 束腰半径与发散角的权衡:
- 小束腰半径:
- 优势:聚焦光斑小,功率密度高(如激光切割)。
- 局限:发散角大,传播距离短;对光学元件像差敏感。
- 大束腰半径:
- 优势:发散角小,传播距离远(如激光雷达准直)。
- 局限:聚焦光斑大,功率密度低。
- 小束腰半径:
- 发散性与光束质量的关系:
- 高光束质量(M²≈1):
- 特征:发散角接近衍射极限,光束能量集中。
- 应用:精密加工、光学通信、冷原子实验。
- 低光束质量(M²≫1):
- 特征:发散角大,光束能量分散。
- 应用:高功率焊接、材料表面处理(需大光斑覆盖)。
- 高光束质量(M²≈1):
6.4、实际应用中的优化策略
- 激光加工:
- 需求:高功率密度(小光斑)与低发散角(长焦深)的平衡。
- 策略:
- 选择短波长激光(如光纤激光器1.06μm)以减小衍射极限。
- 通过透镜聚焦调整束腰半径,但需考虑热透镜效应(高功率下透镜材料变形导致ω₀变化)。
- 使用空间滤波器抑制高阶模,降低M²因子。
- 光学通信:
- 需求:低发散角(长距离传输)与小模场直径(单模光纤耦合)的平衡。
- 策略:
- 采用单模光纤(模场直径约5-10μm),限制光束为基模高斯分布。
- 通过准直器(大束腰半径)减小发散角,但需权衡系统体积。
- 选择1.55μm波长(低损耗窗口)以优化传输距离。
- 激光雷达:
- 需求:高分辨率(小发散角)与大探测范围(高功率)的平衡。
- 策略:
- 采用短脉冲激光(如1550nm光纤激光器)结合小束腰设计以减小发散角。
- 使用波长更短的激光(如532nm绿光)可进一步提升分辨率,但受大气散射限制。
- 通过光束整形技术(如贝塞尔光束)扩展焦深,降低对发散角的依赖。
6.5、常见误区与澄清
- 误区1:束腰半径越小,光束质量越好。
- 澄清:光束质量由M²因子决定。仅缩小束腰半径可能增加发散角,导致M²恶化(如多模光束)。需同时优化模式纯度。
- 误区2:波长越短,发散性越弱。
- 澄清:波长影响衍射极限,但发散性还受M²因子、光束能量分布等因素影响。短波长激光若存在高阶模,发散性可能更强。
- 误区3:发散角可无限缩小。
- 澄清:受衍射极限约束,发散角最小值为θ_min = λ/(πω₀)。实际光束因M²>1,发散角更大。
6.6、参数关系总结表
| 参数 | 与发散角的关系 | 与束腰半径的关系 | 与波长的关系 | 对发散性的影响 |
|---|---|---|---|---|
| 波长(λ) | 正比(λ↑→θ↑) | 无直接关系(通过θ间接影响) | 基础参数,决定衍射极限 | 波长越长,发散性越强 |
| 束腰半径(ω₀) | 反比(ω₀↓→θ↑) | 基础参数,决定聚焦能力 | 无直接关系(通过θ间接影响) | 束腰越小,发散性越强 |
| 发散角(θ) | 基础参数,表征发散性 | 反比关系(θ↑→ω₀↓) | 正比关系(θ↑→λ↑) | 发散角越大,发散性越强 |
| M²因子 | 正比(M²↑→θ_实际↑) | 正比(M²↑→ω₀·θ↑) | 无直接关系(通过θ间接影响) | M²越大,发散性越强(光束质量越差) |