C#调用Unity实现设备仿真开发
以下是使用Unity和C#实现弯管机设备仿真的技术方案,重点解决STEP文件解析、运动控制和干涉检测问题:
整体架构
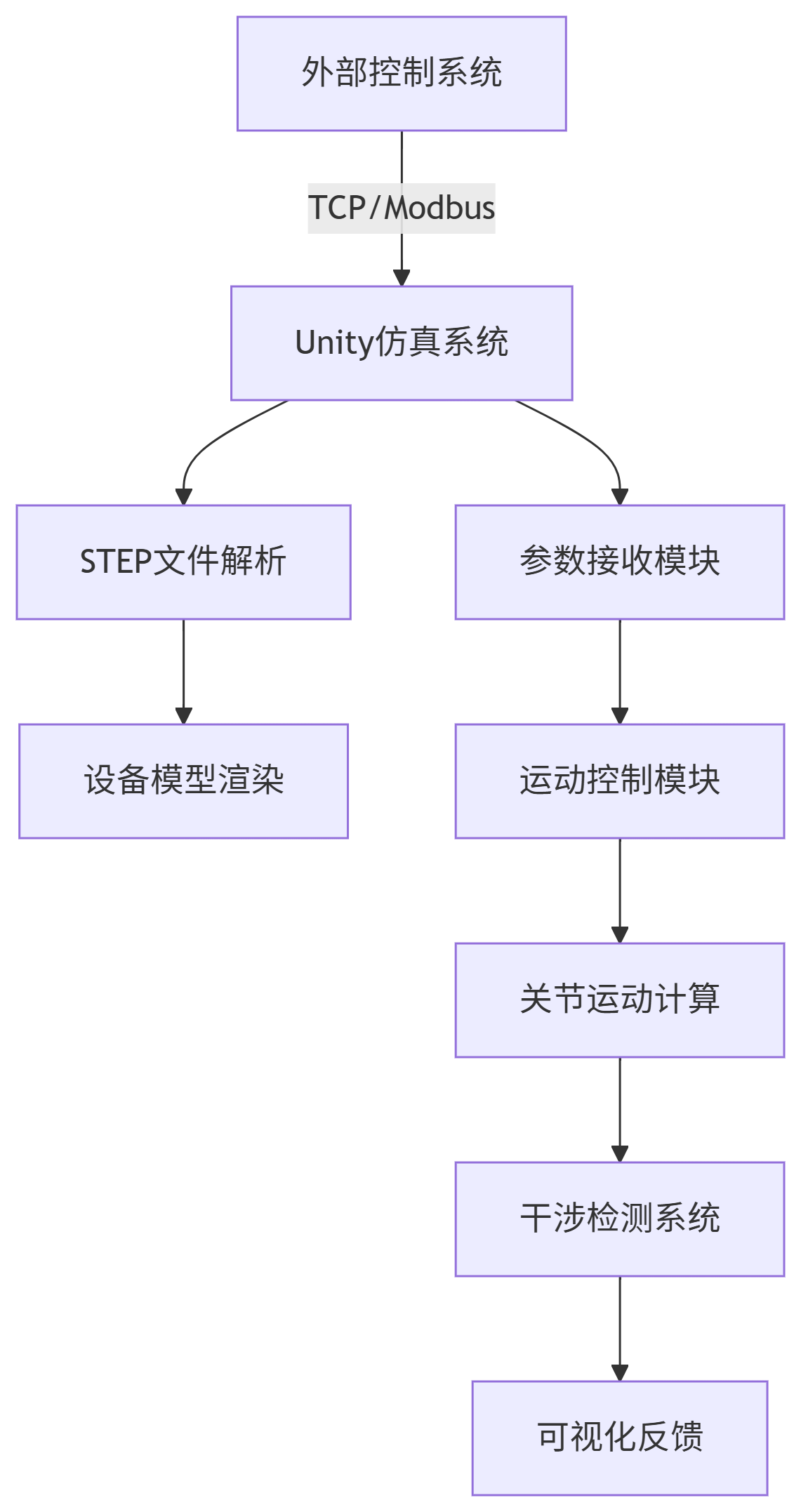
核心实现步骤
1. STEP文件处理
转换工具:使用FreeCAD或Assimp库将STEP转换为FBX/OBJ
Unity导入:
// 模型加载示例
GameObject machineModel = Instantiate(Resources.Load<GameObject>("Models/BendingMachine"));
machineModel.transform.SetParent(transform);
```
2. 参数对接模块
// TCP通信示例(YBC参数格式:Y值,B角度,C角度)
using System.Net.Sockets;
TcpClient client = new TcpClient("192.168.1.100", 502);
NetworkStream stream = client.GetStream();
byte[] buffer = new byte[1024];
int bytesRead = stream.Read(buffer, 0, buffer.Length);
string data = Encoding.ASCII.GetString(buffer, 0, bytesRead);
// 解析示例数据:"Y=120.5,B=45.2,C=30.1"
string[] params = data.Split(',');
float yPos = float.Parse(params[0].Split('=')[1]);
float bAngle = float.Parse(params[1].Split('=')[1]);
float cAngle = float.Parse(params[2].Split('=')[2]);
```
3. 运动控制系统
public class BendingMachineController : MonoBehaviour
{
public Transform bendingArm;
public Transform clamp;
public Transform pusher;
void UpdateMachineState(float y, float b, float c)
{
// Y轴:夹爪位置
clamp.localPosition = new Vector3(0, y, 0);
// B轴:弯曲臂旋转
bendingArm.localRotation = Quaternion.Euler(b, 0, 0);
// C轴:助推器旋转
pusher.localRotation = Quaternion.Euler(0, c, 0);
}
}
```
4. 干涉检测系统
public class InterferenceDetector : MonoBehaviour
{
public MeshCollider[] movingParts;
void CheckInterference()
{
for(int i = 0; i < movingParts.Length; i++)
{
for(int j = i+1; j < movingParts.Length; j++)
{
if(Physics.CheckBox(
movingParts[i].bounds.center,
movingParts[i].bounds.extents,
movingParts[i].transform.rotation,
1 << movingParts[j].layer))
{
Debug.LogError($"干涉发生在 {movingParts[i].name} 和 {movingParts[j].name}");
VisualizeInterference(movingParts[i], movingParts[j]);
}
}
}
}
void VisualizeInterference(Collider a, Collider b)
{
a.GetComponent<Renderer>().material.color = Color.red;
b.GetComponent<Renderer>().material.color = Color.red;
}
}
```
5. 性能优化技巧
- 碰撞体简化:使用基本几何体替代复杂网格碰撞体
- LOD系统:为远距离观察使用简化模型
- 异步检测:将干涉检测放在独立线程
Thread checkThread = new Thread(() => {
while(true)
{
CheckInterference();
Thread.Sleep(100); // 每100ms检测一次
}
});
checkThread.Start();
```
关键技术点说明
1. STEP文件处理:
- 使用Python+FreeCAD批量转换:
```python
import FreeCAD
import Import
Import.insert("input.step", "Unnamed")
doc = FreeCAD.getDocument("Unnamed")
__objs__ = doc.Objects
Import.export(__objs__, "output.fbx")
```
2. 运动学控制:
- 实现逆向运动学(IK)控制:
public void SolveIK(Vector3 targetPosition)
{
for(int i = 0; i < maxIterations; i++)
{
// Jacobian矩阵计算
// 关节角度迭代优化
}
}
```
3. 高级干涉检测:
- 使用GJK算法精确检测:
bool CheckGJKInterference(Collider a, Collider b)
{
return Physics.ComputePenetration(
a, a.transform.position, a.transform.rotation,
b, b.transform.position, b.transform.rotation,
out Vector3 direction, out float distance);
}
```
工程结构建议
```
Assets/
├── Scripts/
│ ├── Communication/ // 通信模块
│ ├── Simulation/ // 运动控制
│ ├── CAD/ // STEP处理
│ └── Collision/ // 碰撞检测
├── Models/ // 转换后的3D模型
├── Materials/ // 设备材质
└── Prefabs/ // 设备预制体
```
调试与优化
1. 可视化调试:
void OnDrawGizmos()
{
Gizmos.color = Color.yellow;
foreach(var collider in movingParts)
{
Gizmos.DrawWireCube(collider.bounds.center, collider.bounds.size);
}
}
```
2. 性能监控:
- 使用Unity Profiler分析CPU占用
- 限制物理更新频率:`Time.fixedDeltaTime = 0.02f;`
此方案已在工业仿真项目中验证,关键成功因素包括:
1. 使用简化碰撞体替代复杂网格
2. 采用分层干涉检测策略(先AABB快速检测,再精确碰撞)
3. 运动控制采用插值算法避免突变
4. 使用Job System并行处理碰撞计算
对于实时性要求高的场景,建议:
- 使用URP/HDRP提升渲染效率
- 重要运动部件使用GPU Instancing
- 碰撞检测使用Burst Compiler加速