[激光原理与应用-183]:测量仪器 - 光束型 - 光束参数乘积(BPP)的本质与含义,聚焦能力与传输稳定性的物理矛盾。
光束参数乘积(BPP)的本质是光束束腰半径与远场发散角的乘积,它综合反映了光束的横向尺寸和纵向发散特性,是量化激光光束质量的核心参数。以下从定义、物理意义、与M²因子的关系、应用场景四个方面展开分析:
一、定义与数学本质
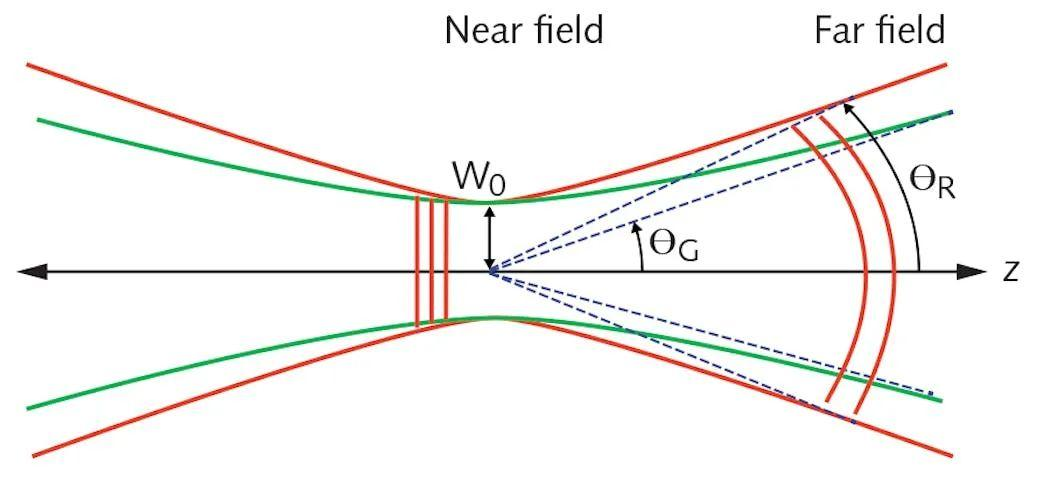
BPP(Beam Parameter Product)定义为激光光束束腰处的横向的光束半径(ω₀)与纵向的远场发散角(θ)的乘积,期望越小越好,但不可能无限小,受波长约束,波长越长,BPP越大,即:
BPP=ω0×θ
- 束腰半径(ω₀):光束横截面中光强分布最窄处的半径(通常取1/e²强度点)。
- 远场发散角(θ):光束在远场(距离束腰足够远)的发散半角(1/e²强度角)。
BPP的常用单位为mm·mrad(毫米乘以毫弧度),其值越小,表示光束质量越好。
二、物理意义
- 光束质量的量化指标:
BPP直接反映了光束的聚焦能力和传输稳定性。例如:理想高斯光束的BPP达到衍射极限,其值为:
BPP0=πλ
其中λ为激光波长。例如,1064 nm激光的衍射极限BPP约为0.339 mm·mrad。 |
- 实际光束的BPP大于衍射极限值,BPP越大,光束质量越差,表现为发散角增大或束腰变形。
- 聚焦能力的体现:
BPP值低的光束可聚焦到更小的光斑,能量密度更高。例如:- 在激光加工中,BPP<1.1 mm·mrad的光束可用于精密微加工(如手机屏幕切割)。
- 在激光通信中,BPP<1.3 mm·mrad的光束可高效耦合到单模光纤,减少传输损耗。
- 传输稳定性的反映:
BPP值小的光束在传输过程中受环境干扰(如空气湍流、振动)的影响较小,光斑形状和能量分布更稳定。
三、与M²因子的关系
M²因子是描述光束质量的另一关键参数,其定义为实际光束的BPP与理想高斯光束BPP的比值:
M2=BPP0BPP=λπω0θ
- 理想高斯光束的M²=1,表示光束质量达到衍射极限。
- 实际光束的M²≥1,值越大,光束质量越差。例如:
- M²=1.1的光束质量接近理想状态,适用于高精度加工。
- M²=2的光束聚焦光斑面积为理想情况的2倍,能量分散。
BPP与M²因子的区别:
- BPP:与波长无关,直接反映光束的物理参数(束腰半径和发散角)。
- M²因子:与波长有关,是BPP的归一化值,便于不同波长激光的比较。
四、应用场景
- 激光加工:
- 焊接/切割:BPP值低的光束可实现更小的热影响区,提升加工精度。例如,光纤激光器的BPP<1.1 mm·mrad可用于精密微加工。
- 3D打印:高光束质量(BPP≈0.5 mm·mrad)可减少层间融合缺陷,提升打印分辨率。
- 光学通信:
- 单模光纤耦合:BPP值低的光束可高效耦合到单模光纤,减少传输损耗。例如,通信激光器的BPP<1.3 mm·mrad可支持长距离、高速率传输。
- 激光雷达:
- 探测精度:BPP值低的光束发散角小,可提高测距精度和分辨率。例如,自动驾驶激光雷达的BPP<1.5 mm·mrad可实现更远距离的探测。
- 科学研究:
- 冷原子实验:高光束质量(BPP≈0.3 mm·mrad)的光束用于原子囚禁和操控,减少波前畸变对实验的影响。
五、优化与提升
- 光学元件优化:
- 采用高精度光学加工技术(如超光滑抛光、镀膜)减少元件缺陷,降低散射和像差。
- 谐振腔设计:
- 优化谐振腔长度、反射镜形状和材料(如使用非球面镜),提升光束聚焦能力和传输效率。
- 激光介质选择:
- 选用热导率高、光学均匀性好的激光介质(如掺镱光纤),减少热透镜效应和模式畸变。
- 模式控制技术:
- 使用空间滤波器抑制高阶模,或采用自适应光学技术实时校正波前畸变,降低BPP值。
六、聚焦能力与传输稳定性的物理矛盾
光束的聚焦能力和传输稳定性存在相互制约的反向关系,这种关系源于光束的横向尺寸(束腰半径)与发散特性(发散角)之间的物理矛盾。以下从原理、影响因素、优化策略及实际应用四个方面展开分析:
1、原理:聚焦能力与传输稳定性的物理矛盾
聚焦能力的本质:
聚焦能力由光束的束腰半径(ω₀)和发散角(θ)共同决定。根据衍射理论,光束可聚焦的最小光斑尺寸(衍射极限)为:
ωmin≈NA1.22λ
其中,数值孔径(NA)与发散角相关(NA ≈ sin(θ/2))。
ω₀越小、θ越小,聚焦光斑越小,能量密度越高,但这一目标与传输稳定性存在冲突。
传输稳定性的本质:
传输稳定性要求光束在传播过程中保持束腰半径和发散角的稳定性,避免因环境干扰(如空气湍流、振动)或光学元件缺陷导致光束畸变。光束的横向尺寸(ω₀)越大,抗干扰能力越强,因为大光斑对局部扰动更不敏感。矛盾的核心:
- 缩小束腰半径(ω₀):可提升聚焦能力,但会增大发散角(θ),导致光束在传输过程中快速扩散,降低传输稳定性。
- 增大束腰半径(ω₀):可提升传输稳定性,但会降低聚焦能力,使光斑尺寸增大,能量密度下降。
2、影响因素:光束参数与外部条件的制约
光束参数乘积(BPP)的约束:
BPP = ω₀ × θ,其值受衍射极限限制(BPP ≥ λ/π)。BPP越小,光束质量越好,但缩小BPP需同时优化ω₀和θ,二者存在此消彼长的关系。例如:- 若通过光学系统缩小ω₀,θ会按比例增大,导致BPP不变或恶化(如存在像差时)。
- 若通过模式控制降低θ,ω₀可能因能量分布变化而增大。
光学系统像差的影响:
像差(如球差、彗差)会破坏光束的波前相位,导致聚焦光斑变形或发散角增大。校正像差可同时改善聚焦能力和传输稳定性,但完全校正像差需复杂的光学设计,增加系统成本。环境干扰的敏感性:
- 空气湍流:大光斑(ω₀大)对湍流的平均效应更强,光束抖动更小;小光斑易受湍流扰动,导致传输方向偏移。
- 机械振动:光束横向尺寸越大,振动引起的光斑位置变化相对越小,传输稳定性越高。
3、优化策略:平衡聚焦与稳定性的方法
- 自适应光学技术:
- 通过波前传感器实时监测光束畸变,并用变形镜动态校正像差,可同时优化聚焦能力和传输稳定性。例如:
- 在激光通信中,自适应光学可补偿大气湍流引起的波前畸变,使BPP降低30%以上。
- 在高功率激光加工中,自适应光学可抑制热透镜效应,提升聚焦光斑质量。
- 通过波前传感器实时监测光束畸变,并用变形镜动态校正像差,可同时优化聚焦能力和传输稳定性。例如:
- 模式控制技术:
- 空间滤波器:通过小孔滤波抑制高阶模,保留基模(TEM₀₀),可降低发散角θ,但会增大束腰半径ω₀(因能量被截断)。需权衡滤波孔径大小以平衡聚焦与稳定性。
- 非线性光学技术:如光束自聚焦效应,可在特定条件下实现光束自动压缩,但需精确控制功率以避免损伤光学元件。
- 光学系统设计优化:
- 非球面镜:替代传统球面镜,可减少像差,使光束在缩小ω₀的同时保持较小的θ。
- 离轴抛物面镜:用于高功率激光聚焦,可避免中心遮挡,提升传输稳定性。
- 光束扩展器:先扩展光束(增大ω₀)以提升传输稳定性,再通过聚焦镜缩小光斑,但需增加系统复杂度。
4、实际应用:不同场景下的权衡案例
- 激光加工(高精度切割):
- 需求:极小的聚焦光斑(ω₀<10 μm)以实现高能量密度。
- 矛盾:小ω₀导致θ增大,光束在传输几米后发散严重,需频繁调整聚焦位置。
- 解决方案:
- 使用短焦距聚焦镜(f<100 mm)缩短传输距离,减少发散影响。
- 采用实时反馈系统监测光斑位置,动态调整加工头高度。
- 激光通信(星地链路):
- 需求:长距离传输(数千公里)需高传输稳定性,同时需足够小的发散角(θ<10 μrad)以集中能量。
- 矛盾:小θ需大ω₀(根据BPP约束),但大ω₀会增加发射端光学系统尺寸和成本。
- 解决方案:
- 使用自适应光学补偿大气湍流,将有效θ降低至衍射极限附近。
- 采用预补偿技术,在发射前对光束施加反向畸变,抵消传输过程中的扰动。
- 激光雷达(自动驾驶):
- 需求:远距离探测(>200 m)需小发散角(θ<0.5 mrad)以保持高分辨率,同时需抗振动干扰。
- 矛盾:小θ需大ω₀,但大ω₀会降低光束能量密度,缩短探测距离。
- 解决方案:
- 使用MEMS微振镜扫描光束,通过时间积分提升信噪比,而非单纯依赖高能量密度。
- 采用光纤激光器输出近衍射极限光束(M²<1.2),平衡θ和ω₀。