bmp280的压力数据采集(i2c设备驱动+设备树编写)
i2c时序
1. bmp280传感器基本控制寄存器
(1)测量控制寄存器(0xF4)
- 功能:配置温度/压力采样精度和工作模式。
- 位定义:
- bit 7:5 (
osrs_t):温度过采样设置(0-5对应关闭/1x/2x/4x/8x/16x) - bit 4:2 (
osrs_p压力过采样设置(同上) - bit 1:0 (
mode):工作模式(00=休眠,01=强制模式,11=正常模式)
- bit 7:5 (
(2)配置寄存器(0xF5)
- 功能:设置滤波器和数据输出速率。
- 位定义:
- bit 7:5 (
t_sb):待机时间(0-7对应0.5ms-4000ms) - bit 4:2 (
filter):IIR滤波系数(0-4对应关闭/2/4/8/16) - bit 0 (
spi3w_en):SPI三线模式使能(I2C模式下保持0)
- bit 7:5 (
2. 状态与识别寄存器
(3)状态寄存器(0xF3)
- 功能:指示传感器当前状态。
- 位定义:
- bit 3 (
measuring):1表示正在测量(数据未就绪) - bit 0 (
im_update):1表示校准参数正在更新
- bit 3 (
(4)芯片ID寄存器(0xD0)
- 功能:验证设备型号,固定值为
0x58(BMP280标识符)
(5)复位寄存器(0xE0)
- 功能:写入
0xB6触发软复位,恢复默认配置
3. 数据寄存器
(6)压力数据寄存器(0xF7-0xF9)
- 地址:
0xF7(MSB)、0xF8(LSB)、0xF9(XLSB) - 功能:存储20位原始压力数据(需左移4位对齐)
(7)温度数据寄存器(0xFA-0xFC)
- 地址:
0xFA(MSB)、0xFB(LSB)、0xFC(XLSB) - 功能:存储20位原始温度数据(需左移4位对齐)
4. 校准参数寄存器(0x88-0xA1)
- 功能:存储出厂校准系数(共26个寄存器),用于温度和压力数据的补偿计算。
- 关键参数:
dig_T1-T3:温度补偿系数(无符号16位/有符号16位)dig_P1-P9:压力补偿系数(混合类型)
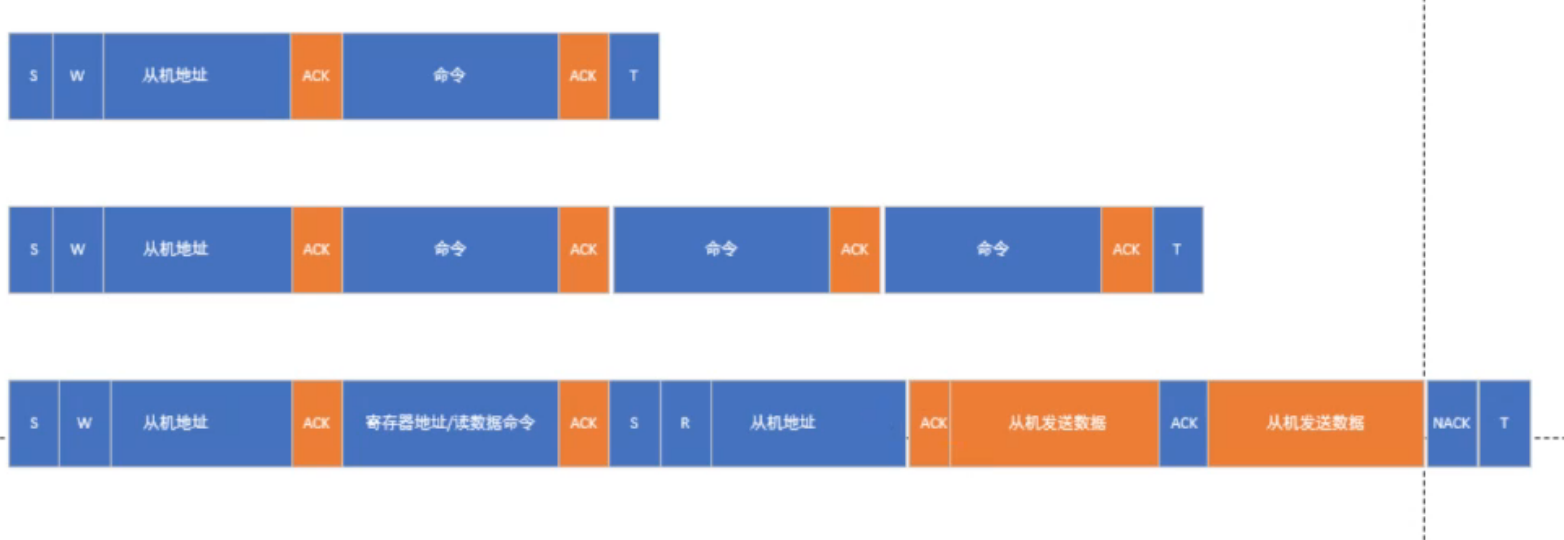
I2C时序控制要点
- 地址选择:
- SDO引脚电平决定I2C地址:低电平为
0x76,高电平为0x77。
- SDO引脚电平决定I2C地址:低电平为
- 读写时序:
- 写操作:发送设备地址(写模式)+寄存器地址+数据。
- 读操作:先发送寄存器地址,再启动重复起始条件读取数据。
- 典型流程:
- 复位 → 读取校准参数 → 配置采样模式 → 轮询状态寄存器 → 读取数据。
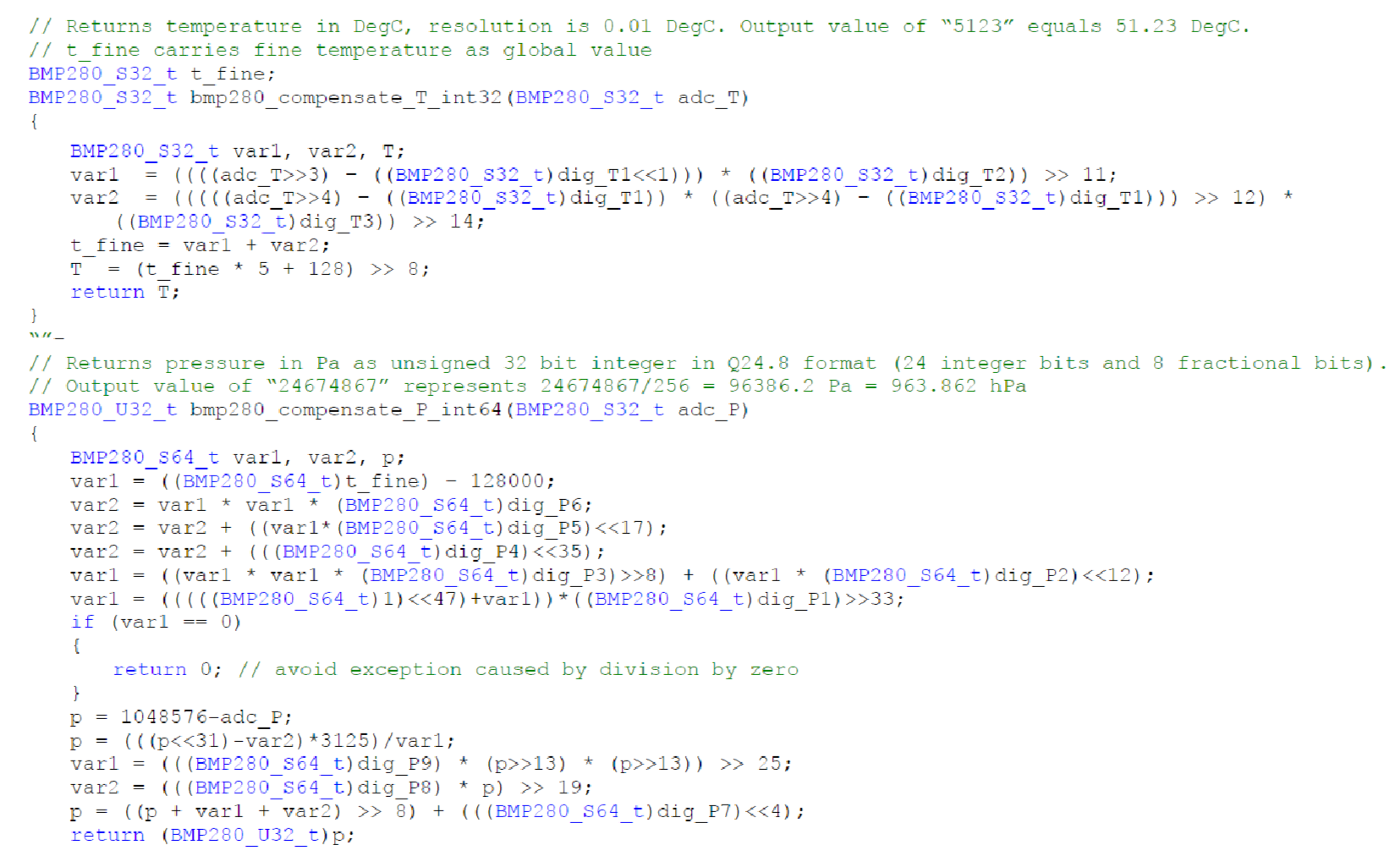
数据处理代码:主要读取原始数据包括3字节压力数据(20位)、3字节温度数据(20位)还有26字节校准数据:
手册数据处理代码
BMP280的数据寄存器结构
BMP280的温度和压力ADC值均为20位数据,存储格式如下:
- 温度数据寄存器(
0xFA-0xFC):0xFA(MSB):高8位0xFB(LSB):中8位0xFC(XLSB):低4位(有效位在bit7-4,其余位无效)
- 压力数据寄存器(
0xF7-0xF9):- 类似温度寄存器,但压力值的XLSB在
0xF9中。
- 类似温度寄存器,但压力值的XLSB在
2. 原始数据组合方法
假设通过I2C读取的3字节数据为 [msb, lsb, xlsb],需按以下步骤处理:
// 组合成20位原始值(左对齐,低4位无效)
uint32_t raw_data = ((uint32_t)msb << 12) | ((uint32_t)lsb << 4) | (xlsb >> 4);
- 左对齐特性:BMP280的ADC值默认左对齐(即高20位有效),因此无需右移补零。
- 低4位处理:
xlsb的低4位是无效数据,需右移4位丢弃。
3. 调用函数时的传参
- 正确做法:传入组合后的20位原始值(直接传
raw_data):int32_t adc_T = (int32_t)raw_data; // 转换为有符号整数 int32_t compensated_temp = bmp280_compensate_T_int32(adc_T); - 错误做法:直接传入未处理的字节数组首地址(函数内部无法解析3字节分散数据)。
4. 为什么函数内部还需要移位?
- 函数内移位(如
adc_T >> 3)是补偿算法的要求,用于对齐校准公式的位宽。 - 传参前移位是为了将3字节数据合并为完整的20位原始值,二者目的不同。
示例代码(完整流程)
// 从传感器读取3字节温度数据(假设已通过I2C读取)
uint8_t temp_data[3] = {0x12, 0x34, 0x50}; // msb, lsb, xlsb// 组合成20位原始值(左对齐)
uint32_t raw_temp = ((uint32_t)temp_data[0] << 12) | ((uint32_t)temp_data[1] << 4) | (temp_data[2] >> 4);// 转换为有符号整数并传入补偿函数
int32_t adc_T = (int32_t)raw_temp;
int32_t temperature = bmp280_compensate_T_int32(adc_T); // 单位:0.01°C
关键总结
- 必须组合数据:调用函数前需将3字节合并为20位原始值(左对齐)。
- 无需额外移位:传入的是完整20位值,函数内部会处理校准所需的移位。
- 数据有效性:确保丢弃
xlsb的低4位无效数据。
代码分析总结
1. 代码功能
这段代码实现了BMP280传感器的温度和压力数据补偿计算,主要包含两个函数:
bmp280_compensate_T_int32:计算温度值(单位:0.01°C)bmp280_compensate_P_int64:计算压力值(单位:Pa,Q24.8格式)
2. 关键实现细节
温度计算:
- 输入:ADC原始温度值(
adc_T) - 输出:补偿后的温度值(分辨率0.01°C)
- 核心算法:
var1 = (((adc_T>>3) - (t_fine_dig_T1<<1)) * t_fine_dig_T2) >> 11; var2 = ((((adc_T>>4) - t_fine_dig_T1)^2 >> 12) * t_fine_dig_T3) >> 14; t_fine = var1 + var2; // 存储到全局变量 T = (t_fine * 5 + 128) >> 8; // 最终温度
压力计算:
- 输入:ADC原始压力值(
adc_P) - 输出:补偿后的压力值(Q24.8格式)
- 核心算法:
// 多阶段多项式补偿计算 var1 = t_fine - 128000; var2 = var1^2 * t_fine_dig_P6 + (var1*t_fine_dig_P5<<17) + (t_fine_dig_P4<<35); var1 = (var1^2*t_fine_dig_P3>>8) + (var1*t_fine_dig_P2<<12); var1 = ((1<<47)+var1)*t_fine_dig_P1>>33;p = 1048576 - adc_P; p = (((p<<31)-var2)*3125)/var1; // 注意防除零处理// 二次补偿 p += ((t_fine_dig_P9*(p>>13)^2)>>25) + ((t_fine_dig_P8*p)>>19); p = (p>>8) + (t_fine_dig_P7<<4);
3. 技术亮点
定点数优化:
- 全程使用整数运算(无浮点)
- 通过移位操作(
>>/<<)实现2的幂次乘除 - Q24.8格式处理压力值(24位整数+8位小数)
校准参数应用:
- 使用
t_fine_dig_T1-T3和t_fine_dig_P1-P9等传感器校准参数 - 温度补偿结果
t_fine会用于压力计算
- 使用
异常处理:
- 压力计算中对
var1==0的情况进行了保护
- 压力计算中对
4. 典型输出示例
- 温度:输出
5123表示51.23°C - 压力:输出
24674867表示96386.2 Pa(963.862 hPa)
1. 温度计算函数 bmp280_compensate_T_int32
参数与变量解析
| 名称 | 类型(实际) | 意义 | 数据来源 |
|---|---|---|---|
adc_T | BMP280_S32_t(32位有符号整数) | ADC原始温度值(20位数据左对齐,需右移4位使用) | 传感器寄存器0xFA-0xFC |
dig_T1 | uint16_t | 温度校准系数1(无符号,用于线性补偿) | 校准寄存器0x88-0x89 |
dig_T2 | int16_t | 温度校准系数2(有符号,用于一阶非线性补偿) | 校准寄存器0x8A-0x8B |
dig_T3 | int16_t | 温度校准系数3(有符号,用于二阶非线性补偿) | 校准寄存器0x8C-0x8D |
var1/var2 | BMP280_S32_t | 中间计算变量,存储补偿公式的中间结果 | 代码内部计算 |
t_fine | BMP280_S32_t | 全局变量,存储精细温度值,用于压力补偿计算 | 代码内部计算 |
| 返回值 | BMP280_S32_t | 补偿后温度值(单位:0.01°C,如5123表示51.23°C) | 公式计算 |
关键操作
- 位运算优化:通过右移操作(
>>3/>>4)对齐ADC数据位,避免浮点运算。 - 校准公式:
t_fine = var1 + var2; // var1为线性补偿项,var2为非线性补偿项 T = (t_fine * 5 + 128) >> 8; // 转换为0.01°C分辨率
2. 压力计算函数 bmp280_compensate_P_int64
参数与变量解析
| 名称 | 类型(实际) | 意义 | 数据来源 |
|---|---|---|---|
adc_P | BMP280_S32_t(32位有符号整数) | ADC原始压力值(20位数据左对齐,需右移4位使用) | 传感器寄存器0xF7-0xF9 |
dig_P1-P9 | 混合类型(uint16_t/int16_t) | 压力校准系数(P1无符号,P2-P9有符号),用于多阶段多项式补偿 | 校准寄存器0x8E-0x9F |
var1/var2 | BMP280_S64_t(64位有符号整数) | 中间计算变量,处理大数运算以避免溢出 | 代码内部计算 |
p | BMP280_S64_t | 补偿过程中的压力中间值,最终转换为Q24.8格式 | 代码内部计算 |
| 返回值 | BMP280_U32_t(32位无符号整数) | 补偿后压力值(Q24.8格式,如24674867表示96386.2 Pa) | 公式计算 |
关键操作
- 64位整数运算:处理大范围数值(如
<<35)和防止溢出。 - Q24.8格式转换:通过移位和除法实现定点数小数部分保留:
p = ((p + var1 + var2) >> 8) + (dig_P7 << 4); // 最终转换为24.8格式 - 防除零保护:检查
var1==0避免异常。
3. 校准参数的意义与作用
| 参数组 | 功能 | 寄存器地址范围 |
|---|---|---|
dig_T1-T3 | 补偿温度传感器的非线性误差,包括偏移量、灵敏度漂移等 | 0x88-0x8D |
dig_P1-P9 | 补偿压力传感器的温度漂移和非线性特性,通过多项式拟合提高精度 | 0x8E-0x9F |
设备树编写:
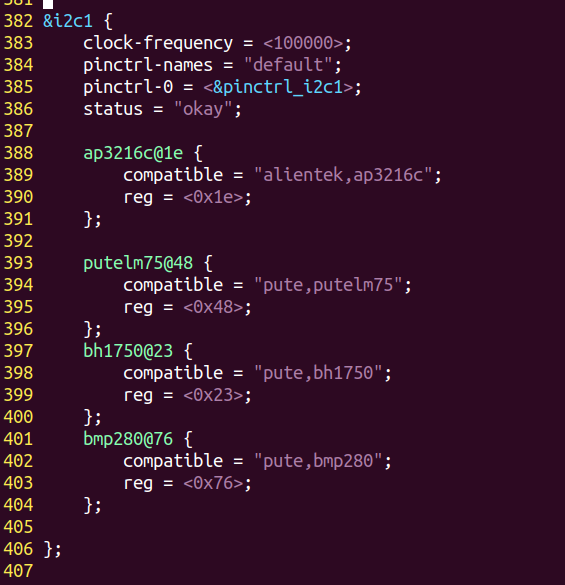
直接在i2c设备节点下加入我们的设备子节点,主要写上设备地值和compatible属性,地址根据sdo接线判断,接地0x76,接vcc 0x77。
驱动编写:
#include <asm/io.h>
#include <asm/uaccess.h>
#include <linux/cdev.h>
#include <linux/delay.h>
#include <linux/device.h>
#include <linux/fs.h>
#include <linux/i2c.h>
#include <linux/init.h>
#include <linux/io.h>
#include <linux/miscdevice.h>
#include <linux/module.h>
#include <linux/mutex.h>
#include <linux/of.h>
#include <linux/of_address.h>
#include <linux/of_gpio.h>
#include <linux/platform_device.h>
#include <linux/string.h>static struct i2c_client *bmp280_client;static ssize_t bmp280_read(struct file *fp, char __user *puser, size_t n,loff_t *off)
{int ret;int i;struct i2c_msg msg;char data[2];char buf1[6] = {0};//存温度压力char buf2[26] = {0};//存校准参数char buf[32] = {0};
//传感器复位data[0] = 0xE0;//复位寄存器地址data[1] = 0xB6;//要写的数据msg.addr = bmp280_client->addr;//从机地址msg.flags = 0;//0写,1读msg.buf = data;msg.len = 2;//长度2个字节,表示把data数组的前两个数据写入bmp280_client->adapter->algo->master_xfer(bmp280_client->adapter, &msg, 1);//调用函数接口传输msg消息//启动测量data[0] = 0xF4;//测量控制寄存器(0xF4)data[1] = 0x27;//要写的数据msg.addr = bmp280_client->addr;//从机地址msg.flags = 0;//0写,1读msg.buf = data;msg.len = 2;//长度2个字节,表示把data数组的前两个数据写入bmp280_client->adapter->algo->master_xfer(bmp280_client->adapter, &msg, 1);//调用函数接口传输msg消息msleep(10);
//读取传感器校准参数data[0] = 0x88;//校准参数寄存器(0x88-0xA1),总共26个msg.addr = bmp280_client->addr;//从机地址msg.flags = 0;//0写msg.buf = data;msg.len = 1;//长度2个字节,表示把data数组的前两个数据写入bmp280_client->adapter->algo->master_xfer(bmp280_client->adapter, &msg, 1);//调用函数接口传输msg消息msg.addr = bmp280_client->addr;msg.flags = I2C_M_RD;msg.buf = buf2;//把校准参数读到datamsg.len = 26;bmp280_client->adapter->algo->master_xfer(bmp280_client->adapter, &msg, 1);//读取温度、压强数据data[0] = 0xF7;//压力数据寄存器(0xF7-0xF9)温度数据寄存器(0xFA-0xFC)msg.addr = bmp280_client->addr;//从机地址msg.flags = 0;//0写,1读msg.buf = data;msg.len = 1;bmp280_client->adapter->algo->master_xfer(bmp280_client->adapter, &msg, 1);//调用函数接口传输msg消息msg.addr = bmp280_client->addr;msg.flags = I2C_M_RD;msg.buf = buf1;msg.len = 6;bmp280_client->adapter->algo->master_xfer(bmp280_client->adapter, &msg, 1);//buf1[6] + buf2[26] -->buf[32]for(i = 0;i < 6;++i){buf[i] = buf1[i];}for(i = 6;i < 32;++i){buf[i] = buf2[i - 6];}ret = copy_to_user(puser, buf, sizeof(buf));return sizeof(buf);
}//文件开关/////////////////
static int bmp280_open(struct inode *node, struct file *fp)
{pr_info("open success\n");return 0;
}
static int bmp280_release(struct inode *node, struct file *fp)
{pr_info("release success\n");return 0;
}
///////////////////////////OK//文件操作函数结构体//////
static struct file_operations fops = {.owner = THIS_MODULE, //计数,表示有几个模块调用文件操作.open = bmp280_open,.release = bmp280_release,.read = bmp280_read,
};
//////////////OK///注册混杂设备////////////////
static struct miscdevice misc_device = {.minor = MISC_DYNAMIC_MINOR, //次设备号申请.name = "misc_bmp280", //设备节点名.fops = &fops, //绑定文件操作函数结构体
};
///////////////////OK///////////probe///////////
static int bmp280_probe(struct i2c_client *pclient,const struct i2c_device_id *pdevice)
{misc_register(&misc_device);bmp280_client = pclient;pr_info("bmp280_probe ok!\n");return 0;
}
/////////////////////NO/////////remove///////
static int bmp280_remove(struct i2c_client *pclient)
{misc_deregister(&misc_device);pr_info("bmp280_remove ok!\n");return 0;
}
/////////////////////OK// i2c设备驱动匹配////////////////
static struct of_device_id bmp280_of_match_table[] = {{.compatible = "pute,bmp280"},{},
};
static struct i2c_device_id bmp280_id_table[] = {{.name = "bmp280"},{},
};
static struct i2c_driver bmp280_i2c_drv = {.driver ={.name = "bmp280",.of_match_table = bmp280_of_match_table,},.id_table = bmp280_id_table,.probe = bmp280_probe,.remove = bmp280_remove,
};
//////////////////////////////OK//驱动入口内调函数//////////
static int __init bmp280_init(void)
{//注册i2c设备驱动i2c_register_driver(THIS_MODULE, &bmp280_i2c_drv);pr_info("bmp280 init success\n");return 0;
}//驱动出口内调函数
static void __exit bmp280_exit(void)
{//销毁i2c设备驱动i2c_del_driver(&bmp280_i2c_drv);pr_info("bmp280 exit success\n");return;
}
/////////////////OK//驱动入口
module_init(bmp280_init);
//驱动出口
module_exit(bmp280_exit);MODULE_LICENSE("GPL");驱动的读时序遇到的大问题:
以前的传感器都是直接读写寄存器,发指令,没加延时等待,但这次的bmp280传感器启动测量后必须加延时等待测量完成再采集数据,否则只会采集的0x80000 等无效数据,切记,以后要仔细查看传感器手册相关时序要求。
已经采集到原始数据了,接下来根据前面手册提供的数据处理函数进行自己的测试程序编写:
必须利用校验数据结合原始数据进行计算才能得到准确压强值。
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <stdint.h>
#include <stdio.h>typedef struct {uint16_t dig_T1;int16_t dig_T2;int16_t dig_T3;uint16_t dig_P1;int16_t dig_P2;int16_t dig_P3;int16_t dig_P4;int16_t dig_P5;int16_t dig_P6;int16_t dig_P7;int16_t dig_P8;int16_t dig_P9;
} BMP280_CalibData;float process_bmp280_data(unsigned char *buf) {// 1. 解析温度和气压原始数据uint32_t press_raw = ((uint32_t)buf[0] << 12) | ((uint32_t)buf[1] << 4) | ((uint32_t)buf[2] >> 4);uint32_t temp_raw = ((uint32_t)buf[3] << 12) | ((uint32_t)buf[4] << 4) | ((uint32_t)buf[5] >> 4);// 2. 解析校准参数BMP280_CalibData calib;calib.dig_T1 = (uint16_t)(buf[6] | (buf[7] << 8));calib.dig_T2 = (int16_t)(buf[8] | (buf[9] << 8));calib.dig_T3 = (int16_t)(buf[10] | (buf[11] << 8));calib.dig_P1 = (uint16_t)(buf[12] | (buf[13] << 8));calib.dig_P2 = (int16_t)(buf[14] | (buf[15] << 8));calib.dig_P3 = (int16_t)(buf[16] | (buf[17] << 8));calib.dig_P4 = (int16_t)(buf[18] | (buf[19] << 8));calib.dig_P5 = (int16_t)(buf[20] | (buf[21] << 8));calib.dig_P6 = (int16_t)(buf[22] | (buf[23] << 8));calib.dig_P7 = (int16_t)(buf[24] | (buf[25] << 8));calib.dig_P8 = (int16_t)(buf[26] | (buf[27] << 8));calib.dig_P9 = (int16_t)(buf[28] | (buf[29] << 8));// 3. 计算温度int32_t var1, var2, t_fine;var1 = ((((temp_raw >> 3) - ((int32_t)calib.dig_T1 << 1))) * ((int32_t)calib.dig_T2)) >> 11;var2 = (((((temp_raw >> 4) - ((int32_t)calib.dig_T1)) * ((temp_raw >> 4) - ((int32_t)calib.dig_T1))) >> 12) * ((int32_t)calib.dig_T3)) >> 14;t_fine = var1 + var2;float temperature = (float)((t_fine * 5 + 128) >> 8) / 100.0f;// 4. 计算气压int64_t var1_p, var2_p, p;var1_p = ((int64_t)t_fine) - 128000;var2_p = var1_p * var1_p * (int64_t)calib.dig_P6;var2_p = var2_p + ((var1_p * (int64_t)calib.dig_P5) << 17);var2_p = var2_p + (((int64_t)calib.dig_P4) << 35);var1_p = ((var1_p * var1_p * (int64_t)calib.dig_P3) >> 8) + ((var1_p * (int64_t)calib.dig_P2) << 12);var1_p = ((((int64_t)1) << 47) + var1_p) * ((int64_t)calib.dig_P1) >> 33;if (var1_p == 0) {return 1; // 避免除以0}p = 1048576 - press_raw;p = (((p << 31) - var2_p) * 3125) / var1_p;var1_p = (((int64_t)calib.dig_P9) * (p >> 13) * (p >> 13)) >> 25;var2_p = (((int64_t)calib.dig_P8) * p) >> 19;p = ((p + var1_p + var2_p) >> 8) + (((int64_t)calib.dig_P7) << 4);float pressure = (float)p / 25600.0f;// 5. 输出结果return pressure;
}int main(void)
{int fd = 0;unsigned char buf[32];//存放原始数据int temp,press,i;short cal[12];fd = open("/dev/misc_bmp280", O_RDWR);if (-1 == fd){perror("fail to open");return -1;}while (1){read(fd, &buf, sizeof(buf));//接收传来的温度压力buf[0]-buf[5],校准参数buf[6]-buf[31];printf("press:%fhpa\n",process_bmp280_data(buf));sleep(1);}close(fd);return 0;
}