强化学习_Paper_ICLR2024_When Should We Prefer DECISION TRANSFORMERS for offline-RL
帮助你判断在什么条件下应该 优先选择 DT、在什么条件下应该 弃用或替换 DT
在稀疏奖励、低质量或长 horizon、人类演示条件下,优先考虑 Decision Transformer;
在数据量极少、高随机或密集奖励场景下,CQL 或 Filtered-BC 往往更划算
paper Link: ICLR 2024: WHEN SHOULD WE PREFER DECISION TRANSFORMERS FOR OFFLINE REINFORCEMENT LEARNING
- 2025: Should We Ever Prefer Decision Transformer?
Github link: prajjwal1/rl_paradigm
一、主要贡献
- DT 相对于CQL 需要更多的训练数据学习competitive policies,但更稳健
- 在稀疏奖励(
sparse-reward) 和 低质量数据上,DT相对于CQL和BC是更好的选择 - DT和BC在下列2中情况表现更加:任务范围增加或数据来自人类演示
- CQL在高随机性和低数据质量相结合的情况下表现出色 (如 D4RL/minari 的
xx/simple-v0数据) - 更大的DT模型需要更少的训练,扩大数据量可以提高ATARI的得分。
- 在 ATARI 游戏中,当我们将用于训练DT的数据量扩大5倍后,平均游戏得分提高了2.5倍。
回答几个主要问题:
- Agent如何受到次优数据存在的影响?
- paper中的三种研究方法
- 改变Agent训练的数据量: 从高质量和低质量数据中学习时研究样本效率
- 基于轨迹的returnReward排序,进行轨迹数据组合: BEST X% WORST X%
- 数据集中轨迹长度增加引起的次优性的影响
- 在较长的轨迹中,奖励状态通常离早期状态更远,这可能会影响训练动态。
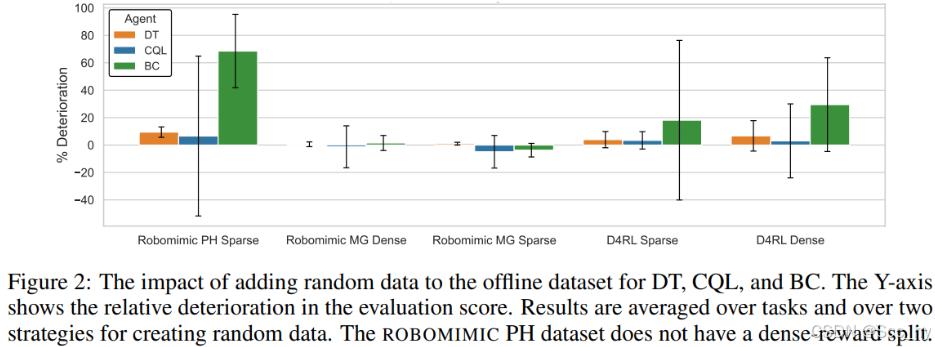
- 向数据添加噪声的影响(random actions)
- 这种设置可以被视为模拟了一种常见的实际情况,即离线数据集伴随着大量的探索。
- 改变Agent训练的数据量: 从高质量和低质量数据中学习时研究样本效率
- 当任务复杂性增加时,Agent表现如何?
- 为了理解这一点,我们研究了状态空间维度和任务视界对代理性能的影响
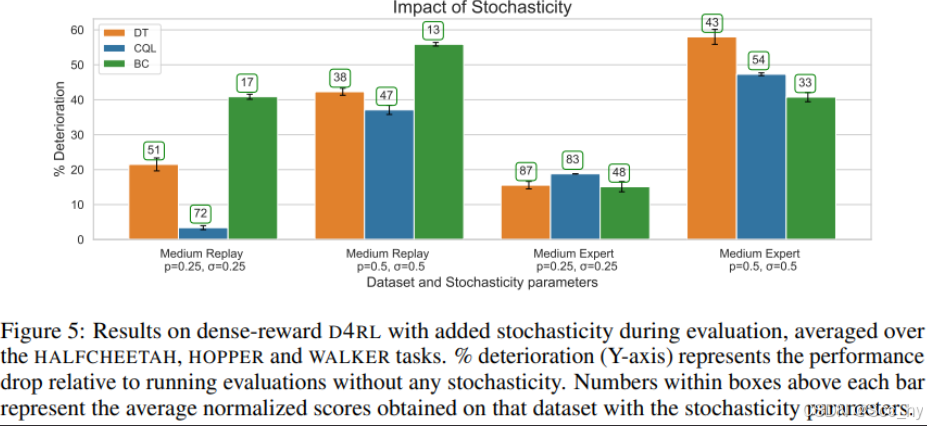
- 在随机环境中,Agent表现如何?
- 改变随机性和数据质量的程度时评估了Agent的性能
- 如何在实践中有效地使用DT?
- 研究结果中DT的整体实力,我们为DT的架构(附录A)和超参数提供了指导,并对ATARI中模型大小和数据量的缩放进行了详细分析
二、DT 的设计假设与优势
| 维度 | DT 的做法 | 带来的优势 |
|---|---|---|
| 建模框架 | 把 RL 问题变成序列建模(state → action → reward → …),用 GPT 式 Transformer 自回归预测动作 | 不需要 Bellman 迭代,天然擅长长程依赖 |
| 学习目标 | Return-Conditioned BC:给定目标回报 Return-to-go 与历史,直接预测动作 | 对稀疏奖励不敏感,只要 Return-to-go 能区分好坏轨迹即可 |
| 数据结构 | 支持任意长度轨迹,无需 MDP 假设 | 对非马尔可夫数据(如人类演示)鲁棒 |
三、基本结论(ESTABLISHING BASELINE RESULTS)
什么时候 DT 值得优先用
| 场景特征 | 结论 | 原因简述 |
|---|---|---|
| 奖励稀疏 | ✅ DT 显著优于 CQL & BC | CQL 的 TD 传播在稀疏奖励下难以学习;DT 只需用 R-to-go 过滤轨迹 |
| 数据质量低(次优/噪声大) | ✅ DT 更鲁棒 | 保守 Q-Learning 会过度悲观;DT 通过序列建模降低外推误差 |
| 任务 horizon 长(>1000 步) | ✅ DT & BC 优于 CQL | CQL 的 Bellman 迭代在长序列中误差累积大 |
| 数据来源为人类演示 | ✅ DT 与 BC 占优 | 人演示往往非马尔可夫、轨迹间分布差异大,DT 无需对齐 MDP |
| 数据量充足 | ✅ DT 可随数据扩展 | 5× 数据 → Atari 上 2.5× 性能提升,呈现正比例放大 |
什么时候 DT 并不合适
| 场景特征 | 结论 | 原因 & 替代方案 |
|---|---|---|
| 数据量极少 | ❌ CQL 更好 | DT 需要更大样本才能匹配 CQL 的性能 |
| 环境高度随机(高噪声转移) | ❌ CQL 显著更好 | 随机性破坏序列一致性,DT 难以建模 |
| 稀疏奖励且数据可过滤 | ❌ Filtered-BC(FBC)可能更好 | Dong et al. (2025) 指出:在相同稀疏奖励机器人任务上,简单过滤轨迹后再 BC 比 DT 表现更好、训练更快、参数量更小 |
| 密集奖励 + 低随机性 | ❌ CQL 通常更优 | 既有文献与 D4RL 原始任务均显示 CQL 领先 |
四、次优数据数据的影响
4.1 从高到低增加数据量
- bset数据集上CQL, 样本效率更高。 混合策略下表现会不佳
- going down between 20% and 80%, adding lower-return data could sometimes harm CQL
- 增加的数据后最优策略和行为策略之间的差异越来越大
- DT需要更多的训练数据, DT更加稳健
- 由于DT 依赖回报 Return-to-go,额外的次优数据对回报 Return-to-go的方差影响较小,更为稳健;
- 在低质量数据上,DT 仅微微好于 CQL
- DT和CQL比BC更可取,特别是在存在次优数据的情况下。

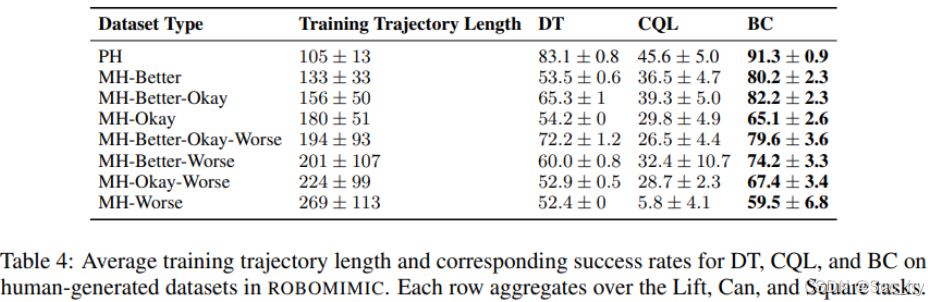
4.2 轨迹长度增加引起的次优性的影响
- 轨迹长度的增加,Agent也会受到类似的影响,但当数据由人类生成时,BC是首选。
4.3 向数据添加噪声的影响
- BC可能会受到噪声数据的影响最大,而DT和CQL则更稳健。然而,在这种设置下,DT的性能比CQL更可靠。
五、当任务复杂性增加时,Agent表现如何
导致任务复杂性的两个主要因素是状态空间的维度和任务MDP的视界
当状态空间的维数增加时,所有Agent都会经历类似的恶化。当任务期限增加时,DT仍然是一个稳健的选择,但当已知数据质量高时,BC可能更可取。(fig3 右)

六、在随机环境中,Agent表现如何
虽然在连续动作空间中对高质量数据进行训练时,DT的下降幅度与CQL相当,但随着数据质量的下降或随机性的增加,CQL预计会相对更稳健。
七、如何在实践中有效地使用DT
在为复杂环境扩展DT时,优先考虑在模型大小之前扩展数据。同时扩展两者可能会进一步提高性能。
决策流程图
实践 Checklist(工程落地)
| 步骤 | 建议 |
|---|---|
| Step 1 | 检查奖励密度:若 reward<0.01 占比 >90%,优先考虑 DT |
| Step 2 | 估计数据量:轨迹数 <1 k 时先尝试 FBC,≥2 k 再考虑 DT |
| Step 3 | 评估随机性:环境转移噪声 σ>0.1 时,放弃 DT 换 CQL |
| Step 4 | 若 horizon>1 k 步,DT 训练时用 context length ≥ 3×horizon 并加 gradient checkpointing 防 OOM |
| Step 5 | 训练 DT 时把 return-to-go 离散化(如 0/1 稀疏标签)可进一步加速收敛 |