CAN通信静默模式的原理与应用
一、CAN通信静默模式的核心价值
背景:
随着智能网联、电动化和自动驾驶技术的发展,车辆电子系统日益复杂,一辆现代乘用车往往集成数十至上百个ECU,这些控制单元需在毫秒级内实现高效、稳定的通信。CAN总线(Controller Area Network)因其高可靠性和实时性,成为车身控制、动力系统、底盘及电池管理等关键系统的通信基础。为适应功能集成与模块化需求,车载网络正向多总线、多节点并行的方向发展,工程人员在开发、测试及冗余控制设计中,常需实现对总线通信的“非侵入式”监听,即节点可接收数据但不发送、不参与仲裁,避免干扰主系统运行。为此,CAN协议引入了静默模式(Silent Mode),作为一种低风险、高可靠的监听机制,广泛应用于调试、冗余备份及通信安全场景中。
面临的问题:
- 误发报文风险:测试或调试节点默认具备发送能力,一旦误发报文,可能干扰主系统,带来安全隐患。
- 仲裁电平干扰:即使未实际发包,仲裁过程中的物理信号也可能影响高优先级节点通信。
- 冗余系统冲突:主备控制器共用总线,备控若不静默,易与主控报文冲突,破坏容错机制。
- 软件屏蔽不可靠:仅靠软件禁发无法硬件隔离,程序异常时仍可能发包,不符合功能安全要求。
静默模式的重要性和意义:
CAN静默模式是一种只接收、不发送的通信状态,能够实现节点对总线数据的非侵入式监听,避免因误发报文干扰系统。它广泛应用于调试、诊断、冗余控制等场景中。在开发测试阶段,静默模式可防止测试设备错误发包,提高调试安全性。在自动驾驶等功能安全系统中,备用控制器通过静默监听主控状态,实现安全可靠的主备切换。在OTA升级、远程监控等应用中,静默模式保障外部工具安全接入而不影响正常通信。相比软件禁发策略,静默模式通过硬件实现对发送功能的隔离,可提升安全防护水平,有助于满足ISO26262等相关标准的要求。作为一种通用、安全的通信机制,静默模式在现代汽车CAN系统中发挥着重要作用。
二、CAN通信静默模式的概述与对比
静默模式的定义:
CAN静默模式是指一种节点工作状态,在该状态下,CAN节点只接收总线数据而不进行任何发送操作,同时不参与总线仲裁和物理电平驱动。启用静默模式的节点不会对总线产生任何干扰,在物理层上对其他节点透明,常用于调试、监测或备用控制系统中,确保数据监听的安全性与非侵入性。
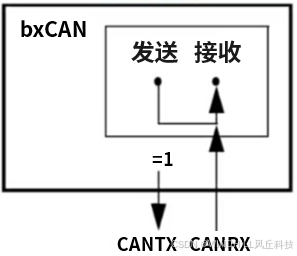
静默模式的工作原理:
静默模式的实现依赖于CAN控制器内部的配置寄存器。通过设置控制寄存器中的Silent位,控制器会屏蔽其驱动CAN总线的输出能力,仅保留接收功能。
在此模式下,即使应用层尝试调用发送函数,控制器也不会输出电平信号或占用总线,且不参与仲裁过程。这种机制确保了节点在逻辑层可以执行正常代码,但在物理层不会对其他通信节点构成干扰。静默模式可在多数主流CAN控制器中通过软件配置实现,常用于调试模块接入、冗余节点监听、总线数据采集等典型应用场景。
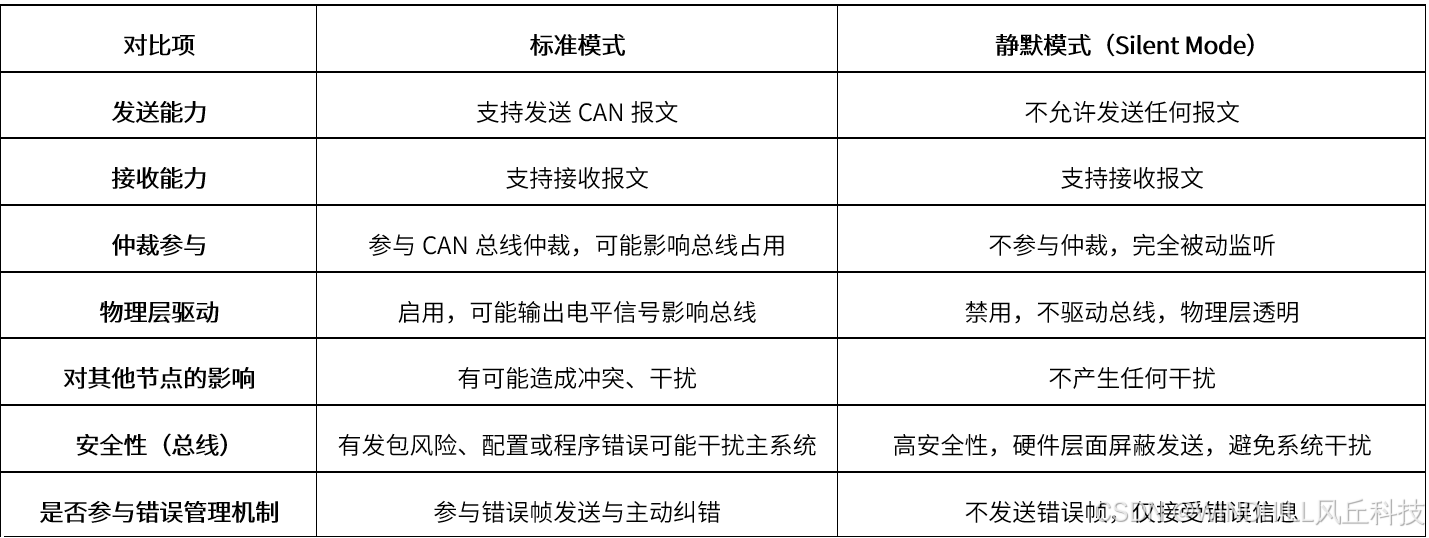
与标准模式的对比:
三、静默模式在车辆工程中的典型应用
在现代车辆电子系统中,CAN静默模式因其“只接收、不发送”的非侵入性特性,被广泛应用于多个关键场景。以下是其在车辆工程中的典型应用:
1. 调试与测试阶段的安全监听
在车辆研发初期,工程师常需接入总线进行报文监听、协议验证和功能调试。通过将调试设备设为静默模式,可防止意外发送报文造成系统干扰,尤其在动力、制动等安全关键总线中,确保测试过程不影响实际运行逻辑,是调试工具接入的标准配置之一。
2. 冗余控制系统的主备监听
在自动驾驶、电驱控制等功能安全要求较高的系统中,常采用主备控制器共用一条CAN总线。备控设备在主控正常时需保持完全静默,仅监听其状态;一旦主控失效,方可切换至主动工作状态。静默模式可实现这一“随时监听、静默待命”的热备功能,是系统冗余架构安全切换的基础。
3. 远程诊断与OTA升级
在车辆远程诊断(如UDS服务)或OTA在线升级过程中,外部诊断仪、升级工具接入CAN网络时需避免干扰原有通信。通过启用静默模式,这些外部设备可以实时接收系统状态、捕捉报文流,而不主动参与通信,保障系统在运行中的完整性与升级过程的安全性。
4. 多通道通信中的被动网关监听
在一些整车架构中,存在多条CAN总线同时运行(如动力总线、车身总线、诊断总线等),某些通信网关或桥接模块需对其他总线进行只读监听,用于转发、同步或日志记录。静默模式可确保这些模块不会向非目标网络发包,避免总线资源冲突,提升系统隔离性。
5. 故障复现与黑匣子数据采集
在车辆发生异常或事故后,工程人员需对现场CAN数据进行复现与回放分析。使用启用静默模式的数据记录设备,可实现不干扰原车通信状态下的数据采集,为后续故障诊断和责任分析提供可靠依据。
四、IPEmotion软件CAN静默模式功能
IPEmotion是一款专业级数据采集与车辆测试软件,广泛应用于汽车电子、动力系统、热管理及NVH(噪声、振动与声振粗糙度)等工程领域。它支持多种硬件平台和通信协议,包括 CAN、LIN、Ethernet、FlexRay 等,具备强大的总线数据采集、报文解析、信号监控与记录功能,特别适用于整车开发与调试过程中的数据管理与测试自动化。

在CAN网络调试方面,IPEmotion提供灵活的 CAN通道配置功能,用户可根据测试需求进行波特率、协议数据库(如*.dbc文件)、信号定义等参数设置。其中,软件支持将单个或多个CAN通道设置为静默模式,使连接的设备仅作为监听节点存在,而不主动发送任何数据。
该功能的典型作用包括:
• 在不干扰原车通信的情况下,实时采集CAN总线报文;
• 防止调试过程中误发帧造成系统干扰;
• 实现外部数据记录仪、测试工具与车辆总线的物理层隔离监听;
• 满足ISO 26262等功能安全测试过程中对“非侵入式测试”的要求。
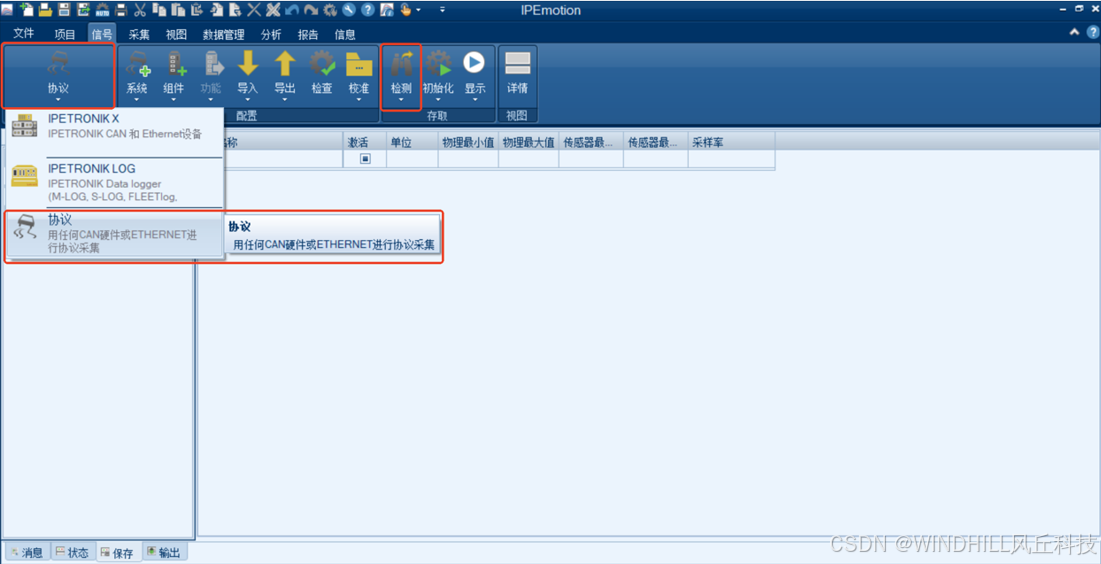
IPEmotion设置CAN静默模式流程如下:
1.打开IPEmotion,“硬件”选择“协议”,点击检测。
......
请点击此处,查看剩余20%精彩内容!
▶ IPEmotion数据采集软件功能介绍
▶ 实现自动化测试的新高度——CAN FD一致性测试系统