FreeRTOS任务基础知识
FreeRTOS任务系统
- 前言
- 前后台系统
- 抢占式多任务系统
- 任务和协程
- 任务
- 协程
- 任务状态
- 不同任务状态之间的转换关系
- 任务优先级
- 任务优先级权衡
- 任务的优先级可以相同吗
- 任务函数
- 任务控制块
- 1. TCB的作用
- 2. TCB的核心成员
- 3. TCB的关键功能
- 3.1 任务状态管理
- 3.2 上下文切换
- 3.3 优先级管理
- 4. TCB的创建与初始化
- 4.1 动态创建(xTaskCreate)
- 4.2 静态创建(xTaskCreateStatic)
- 5. TCB与任务句柄的关系
- 任务栈
- 栈大小
前言
本文介绍了FreeRTOS的任务系统,包括任务的含义、状态、优先级、任务控制块,以及任务栈。并强调了在任务中调用vTaskDelay函数的话,任务状态会经历怎样的改变。本文属于任务基础知识。
前后台系统
在主函数中,运行while(1)死循环,里面轮询执行一些代码,通过中断执行一些需要立即处理的事情。这时候,while死循环是后台程序,而中断服务程序是前台程序。
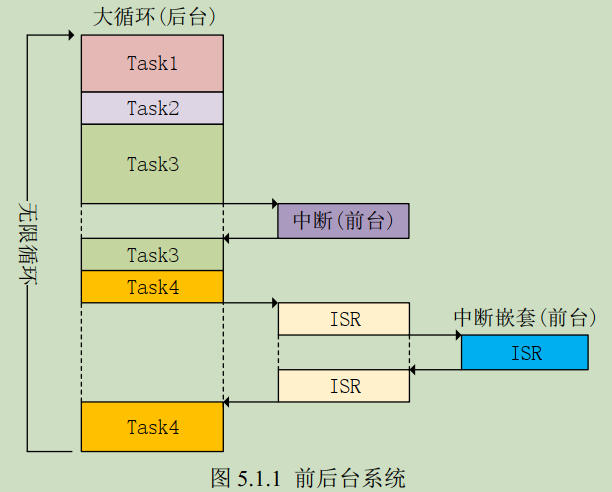
上图引自《STM32F4 FreeRTOS开发手册》
抢占式多任务系统
任务调度器负责决定哪个任务先执行,哪个任务后执行。FreeRTOS是抢占式实时多任务系统,下图描述了抢占式系统的执行流程。
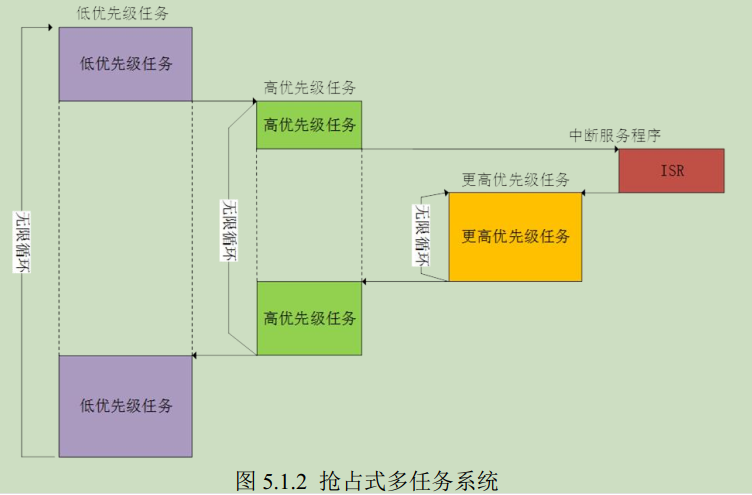
上图引自《STM32F4 FreeRTOS开发手册》
任务和协程
任务(Task)和协程(co-Routine)都可以在应用中使用,二者的API不同,不能通过队列或信号量将数据在二者之间传递。区别在于协程是为资源很少的MCU准备,开销小。
任务
RTOS调度器会开启和关闭每一个任务,同一时间只有一个任务栈执行,每个任务都有自己的堆栈,任务退出执行的时候需要压栈,将寄存器和堆栈内容保存好,等下一次运行的时候就出栈,将上下文环境恢复成跟上次退出的时候完全一样的。
这种情况下,每个任务是独立的,支持优先级设置,但缺点是由于每个任务都有自己的堆栈导致RAM开销大。如果要使用抢占,就必须考虑重入的问题。
协程
MCU的资源越来越多,导致协程的使用几乎没有了。所有协程使用同一个堆栈,使用合作式调度器,可以在抢占式调度器中使用协程。协程是通过宏定义实现的。为降低RAM消耗有很多限制。
任务状态
- 运行态
处于运行状态的任务。 - 就绪态
已经准备就绪,可以运行的任务。但它没有处于运行态,因为有更高优先级或者相同优先级的任务在运行。 - 阻塞态
正在等待某个外部事件的任务就是处于阻塞态。比如在任务中调用了vTaskDelay(),就会等到延时完成。任务在等待队列、信号量、事件组、通知或互斥量的时候也会进入。但有超时事件,一旦到达超时时间,即便没有等到需要的事件也会退出阻塞态,进入就绪态。 - 挂起态
跟阻塞态相比,没有超时时间。任务进入挂起态调用vTaskSuspend(),任务退出挂起态调用vTaskResume() - 删除态
任务已被删除,等待内存回收。
| 状态 | 核心特点 | 触发方式 |
|---|---|---|
| 运行态 | 正在占用 CPU 执行 | 调度器选中 |
| 就绪态 | 准备执行,等待高优先级任务释放 | CPU 任务创建、延时结束、资源释放 |
| 阻塞态 | 等待事件(延时、信号量、队列等) | vTaskDelay()、xQueueReceive()等 |
| 挂起态 | 暂停执行,需显式恢复 | vTaskSuspend()、vTaskResume() |
| 删除态 | 任务已删除,等待内存回收 | vTaskDelete() |
不同任务状态之间的转换关系

注意:
在任务中调用vTaskDelay(),会直接使这个任务进入阻塞态,把CPU的使用权交出来,调度器会让其他处于就绪态,并且优先级最高的任务来处于运行态,占据CPU。直到延时完成,它会变成就绪态,等待调度器选中它来运行。
并不是让它在就绪态,占用CPU而等待延时结束。
关于vTaskDelay常见误区澄清:
- 误区 1:认为vTaskDelay()会让任务在就绪队列中等待。
- 纠正:任务会进入阻塞队列,而非就绪队列。
- 误区2:认为延时期间任务仍占用 CPU 资源。
- 纠正:阻塞态任务完全释放 CPU,由其他就绪任务执行。
- 误区3:混淆vTaskDelay()与忙等待(如for(;;)循环)。
- 纠正:vTaskDelay()是无负载延时,忙等待会持续占用 CPU。
vTaskDelay()的核心作用:使任务主动放弃 CPU,进入阻塞态,等待指定时间后再参与调度。
状态转换路径:
运行态 → vTaskDelay() → 阻塞态 → 延时到期 → 就绪态 → 调度器选中 → 运行态。
合理使用vTaskDelay()是实现任务协作和降低系统功耗的关键,它能确保高优先级任务在延时期间仍可执行。
任务优先级
每个任务的优先级在0~(configMAX_PRIORITIES-1)。
configMAX_PRIORITIES在 FreeRTOSConfig.h 中定义,指定系统支持的最大优先级数值(从 0 开始),用于定义系统支持的最大任务优先级数量,它直接影响任务调度器的行为和内存使用效率。而configMAX_PRIORITIES这个宏的大小,用户可以根据需要自行设定。
#define configMAX_PRIORITIES ( 5 )
任务的优先级数字越小,优先级越低。所以0的优先级最低,configMAX_PRIORITIES-1优先级最高。空闲任务优先级为0。
跟STM32的中断优先级相反。
任务优先级权衡
| 参数 | 作用 | 配置建议 |
|---|---|---|
| configMAX_PRIORITIES | 定义系统支持的最大任务优先级数量 | 根据实际需求设置,通常 5~32 |
| 任务的优先级范围 | 0(最低)到 configMAX_PRIORITIES-1(最高) | 避免使用过多优先级层级 |
| 内存影响 | 优先级数量越多,调度器数据结构占用内存越大 | 够用即可,避免浪费 |
合理配置 configMAX_PRIORITIES 是平衡系统性能与资源消耗的关键,需根据应用复杂度和实时性要求进行优化。
任务的优先级可以相同吗
#define configUSE_TIME_SLICING 1
configUSE_TIME_SLICING 等于1的话,允许不同任务的优先级相同。这样的任务会使用时间片轮转调度器运行。
任务函数
任务函数就是实现这个任务想要做什么事情的函数。比如:
void led0_task(void * pxParameters)
{while(1){LED0 = ~LED0;vTaskDelay(500);}
}
这个函数返回值是void,入参是void*类型的指针。任务函数中,有一个死循环,不允许退出任务!死循环里可以执行具体的代码,完成这个任务需要做的事。
如果需要从这个任务函数中退出,就一定要执行vTaskDelete(NULL)删除此任务。比如:
void start_task(void * pxParameters)
{taskENTER_CRITICAL();//进入临界区//创建LED0任务xTaskCreate((TaskFunction_t) interrupt_task,(const char*) "interrupt_task",(uint16_t) INTERRUPT_STK_SIZE,(void*) NULL,(UBaseType_t)INTERRUPT_TASK_PRIO,(TaskHandle_t*) &INTERRUPTTask_Handler);vTaskDelete(StartTask_Handler);//删除开始任务taskEXIT_CRITICAL();//推出临界区
}
这个任务函数中,没有死循环,只有创建了另一个任务,然后删除了start_task任务。
任务控制块
在FreeRTOS中,对于每一个任务都有一些属性需要存储,这些属性整合到一个结构体中,就叫任务控制块,名为TCB_t,是管理任务的核心数据结构,每个任务都有唯一的TCB实例。它存储了任务的所有状态信息,是调度器进行任务管理的基础。以下是详细解析:
1. TCB的作用
- 保存任务状态:如任务当前状态(运行/就绪/阻塞)、优先级、栈指针等。
- 实现任务切换:调度器通过TCB恢复或保存任务上下文。
- 管理任务资源:如任务句柄、栈空间、挂起的事件等。
2. TCB的核心成员
TCB的定义位于task.h中,主要包含以下字段(简化版):
typedef struct tskTaskControlBlock {volatile StackType_t *pxTopOfStack; // 栈顶指针,指向当前栈顶位置ListItem_t xStateListItem; // 状态列表项,用于就绪/阻塞队列ListItem_t xEventListItem; // 事件列表项,用于等待特定事件UBaseType_t uxPriority; // 任务优先级StackType_t *pxStack; // 栈底指针,指向任务栈的起始地址char pcTaskName[ configMAX_TASK_NAME_LEN ]; // 任务名称// ... 其他成员(如事件标志、栈溢出检测等)
} tskTCB;
3. TCB的关键功能
3.1 任务状态管理
- 通过
xStateListItem将任务链接到不同队列:- 就绪队列:所有就绪态任务的TCB通过
xStateListItem链接。 - 阻塞队列:等待事件的任务TCB通过
xEventListItem链接到对应事件队列。
- 就绪队列:所有就绪态任务的TCB通过
3.2 上下文切换
- 保存上下文:任务切换时,当前寄存器值被保存到任务栈,栈顶地址更新到
pxTopOfStack。 - 恢复上下文:调度器选中任务后,从
pxTopOfStack恢复寄存器值,使任务继续执行。
3.3 优先级管理
uxPriority字段存储任务优先级,调度器据此决定任务执行顺序。- 支持动态优先级调整(
vTaskPrioritySet())。
4. TCB的创建与初始化
4.1 动态创建(xTaskCreate)
TaskHandle_t xTaskCreate(TaskFunction_t pxTaskCode, // 任务函数const char * const pcName, // 任务名称configSTACK_DEPTH_TYPE usStackDepth, // 栈深度void *pvParameters, // 任务参数UBaseType_t uxPriority, // 优先级TaskHandle_t *pxCreatedTask // 任务句柄(即TCB指针)
);
4.2 静态创建(xTaskCreateStatic)
// 需要预先定义栈空间和TCB内存
StackType_t xStack[ configMINIMAL_STACK_SIZE ];
StaticTask_t xTaskBuffer;TaskHandle_t xTaskCreateStatic(TaskFunction_t pxTaskCode,const char * const pcName,uint32_t ulStackDepth,void *pvParameters,UBaseType_t uxPriority,StackType_t *puxStackBuffer, // xStack,静态栈空间StaticTask_t *pxTaskBuffer // &xTaskBuffer,静态TCB内存
);
5. TCB与任务句柄的关系
- 任务句柄(TaskHandle_t):本质是指向TCB的指针。
- 通过句柄可操作任务:
TaskHandle_t xTaskHandle;// 创建任务并获取句柄 xTaskCreate(vTaskFunction, "Task", 1024, NULL, 1, &xTaskHandle);// 使用句柄操作任务 vTaskSuspend(xTaskHandle); // 挂起任务 vTaskResume(xTaskHandle); // 恢复任务 vTaskPrioritySet(xTaskHandle, 2); // 修改优先级
任务栈
任务切换时需要将当前运行的任务保存在此任务的栈中,等下次运行的时候,从该任务的堆栈中恢复现场,使其接着上次运行的位置继续运行。
如果使用xTaskCreate()创建任务,即动态方法,任务堆栈会自动创建;但如果使用xTaskCreateStatic()创建任务,即静态创建,就需要我们自行定义任务堆栈。将堆栈首地址作为函数入参传递给xTaskCreateStatic函数,前面有介绍,这里回顾一下。

栈大小
栈的数据类型是StackType_t,本质上是uint32_t。
#define portSTACK_TYPE uint32_t
typedef portSTACK_TYPE StackType_t;
如果我们定义栈深度是100,那么实际的栈大小是400字节。