STC-FOC Lite程序详解-SVPWM查表生成
本篇文章致力于对STC-FOC Lite的原版代码进行详尽的原理解释,并且提出更改/移植/裁剪建议,方便大家对这个项目进行更加适配自己的个性化更改。
在对SVPWM代码进行理解前,需要先对SVPWM的一些概念进行清楚。首先SVPWM并不是一种算法,只是一种波形的名称。SVPWM在程序输出上大概的是长这样子。
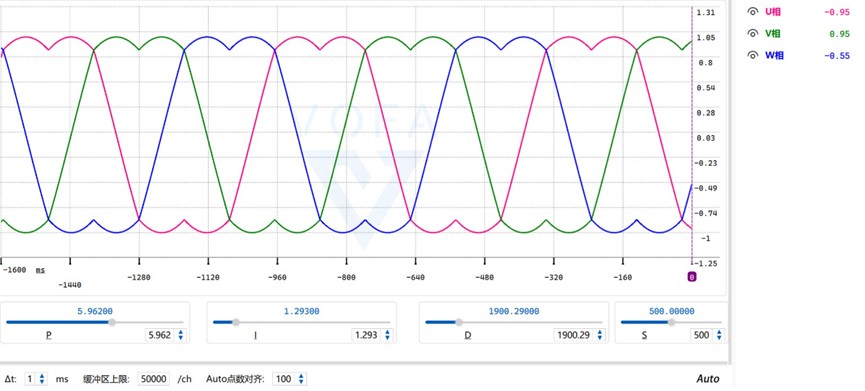
以上的波形是存在正负的交流波形,实际进行PWM输出的时候,需要将电压抬高到0~VCC的范围内。也就是说,正常没有输出的时候,电机的三相输出也是存在着三路50%占空比的PWM输出。此时电机的输入电流为0,因为三相线同时抬高和降低,并不存在电位差。
虽然SVPWM本身并不算是一种算法,但是逆帕克变换和逆克拉克变换就是算法了,这两个主要是为了将常量Ud和Uq重新通过电角度转换成电压矢量。从结果来看,就是生成SVPWM波形。
如果将这些逆变换作为一个函数来看,就是输入了Uq(电机切向力,越大转的越快),Ud(电机侧向力矩,给的大也不会转)(Uq和Ud相互垂直),还有一个电角度,然后就能输出控制电机的三相波形。
这里因为是开环控制,所以没法闭环Ud。将Ud设置为0,Ud设置为满幅值,即可得到上面的波形。控制Uq的大小,只需要对波形整体做高度上的缩放即可。
讲完了基本原理,接下来讲一下详细的程序:
// 归一化角度到0~编码器最大值范围int _normalizeDat(long angle_dat){int result = (int)(angle_dat % (Encode_bit_Max - 1));return (result >= 0) ? (result) : (result + (Encode_bit_Max - 1));}
复制代码
首先是角度归一化,将数据缩放到编码器最大值,因为电角度和实际的读取角度之间存在一个比例换算关系(跟极对数和方向有关),所以要防止这个角度溢出。
// 获得原始数据u16 Read_Angle_Int_Dat(void){return _normalizeDat((_angle_this_dat * moto_save.dir * moto_save.pp) - moto_save.zero); // 机械绝对值角度转换为电角度// Tips:_zero这个是必须存在的,因为如果没有对零点对齐的话,粘磁铁导致的角度误差将导致电机无法正确旋转}
复制代码
接下来是读取原始的电角度数据,_angle_this_dat就是从磁编码器读到的原始数据,不过,因为极对数的存在,并不能直接使用。需要对原始点角度乘以极对数和方向,并且加上零点数据来进行对齐。
/*** 根据编码数据获取SVPWM数值** 本函数通过编码数据计算并返回相应的SVPWM数值编码数据被分为四个区间,* 每个区间对应一种SVPWM数值的计算方式这种设计是为了压缩存储,以减少内存占用,* 不同相位的SVPWM信号生成** @param encode_dat 编码数据,这是一个16位的整数,代表某种编码后的数据* @return 返回计算出的SVPWM数值,它可以根据输入的编码数据分布在四个不同的区间内*/int Get_SVPWM_Num(u16 encode_dat){int out;// 根据编码数据在区间[0, 16383]中的位置,决定使用哪种方式计算SVPWM数值switch ((encode_dat % 16384) / 4096){case 0:// 在第一个区间[0, 4095]内,直接使用编码数据模4096作为索引获取SVPWM数值out = SVPWM_List[encode_dat % 4096];break;case 1:// 在第二个区间[4096, 8191]内,使用4095减去编码数据模4096作为索引获取SVPWM数值,并保持正向out = SVPWM_List[4095 - (encode_dat % 4096)];break;case 2:// 在第三个区间[8192, 12287]内,直接使用编码数据模4096作为索引获取SVPWM数值,并取负值out = -SVPWM_List[encode_dat % 4096];break;case 3:// 在第四个区间[12288, 16383]内,使用4095减去编码数据模4096作为索引获取SVPWM数值,并取负值out = -SVPWM_List[4095 - (encode_dat % 4096)];break;}return out;}
复制代码
接下来的这个就是对于SVPWM表数据的压缩,因为SVPWM的三相信号其实只是存在120°的相位差,本质波形都是一样的。所以只存一相的波形就可以了。
并且,将单个SVPWM波形等分四份后,可以观察到,后面三份都可以通过第一份的垂直镜像和水平镜像得到。所以,上面这个函数就是处理超出1/4区域的波形,使得在正确的区间内进行变换,从而取到一个正确的SVPWM波形。
void setTorque(float Uq, u16 encode_dat){float ratio = (Uq / voltage_power_supply) * (1.0 / 12.0); // 乘以宏定义方向out1 = (int)(Get_SVPWM_Num(encode_dat) * ratio);out2 = (int)(Get_SVPWM_Num(encode_dat + 5461) * ratio); // 偏移得到剩余两相波形out3 = (int)(Get_SVPWM_Num(encode_dat + 10922) * ratio);setPwm(out1, out2, out3);}
复制代码
接下来就是最终的输出函数了,意外的是不是有些简单?
因为复杂的计算都通过表简化了,这种方式可以保证一次运算,无限调用。十分适合电机这种每次都要重复计算的场合。
这个函数里面通过对SVPWM表的偏移实现了完整的三相波形输出,并且表仅仅占用了8K的程序ROM空间(考虑到分辨率和不同极对数适配,所以没有再次压缩,不然占用空间可以进一步缩小到1.2K的ROM大小)
通过调用setTorque这个函数就可以实现电机的闭环转动了。如果没有接编码器,直接给一个虚拟的自增电角度,电机也是可以转的。
STC-FOC Lite程序详解-SVPWM查表生成
https://www.stcaimcu.com/thread-11505-1-1.html
(出处: 国芯人工智能技术交流网站)