图漾GM461-E1相机专栏
文章目录
- 1.GM461-E1相机
- 1.1 GM461-E1工作场景
- 1.2 GM461-E1 IO线和数据线定义
- 1.2.1 IO接口定义
- 1.2.2 数据接口线
- 1.2.3 GM461-E1相机正面安装方向
- 1.2.4 GM461相机连接拓扑网络
- 1.2.5 上下面螺纹孔安装
- 1.3 GM461-E1相机性能指标
- 2.GM461-E1相机调参技巧
- 2.1 深度图滤波设置
- 2.2 如何调整相机左右IR的参数?
- 2.2.1 手动调整左右IR曝光
- 2.2.2 调整相机左右IR自动曝光
- 2.3 调试深度图
- 2.3.1 查看深度值
- 2.3.2 渲染范围调节方法
- 2.3.3 调节深度图渲染效果
- 2.4 保存图像
- 2.4.1 存图设置
- 2.4.2 单张存图
- 2.4.3 连续存图
- 2.5 GM461-E1相机保存参数配置
- 2.6 GM461-E1相机参数补充说明
- 3.GM461-E1相机SDK相关
- 3.1 C++语言SDK(`推荐`)
- 3.2 ROS1版本(`推荐`)
- 3.3 ROS2版本(`推荐`)
- 3.4 C#语言SDK
- 3.5 Python语言SDK
- 4.GM461-E1相机常见FAQ
- 5.GM461-E1相机测试结果
- 5.1 GM461-E1 帧率测试
- 5.1.1 GM461-E1 出图延迟时间
- 5.1.2 GM461-E1 帧率测试
- 6.其他学习资料
1.GM461-E1相机

1.1 GM461-E1工作场景
GM461是一款高性价比的3D工业相机新品,兼具工业级的稳定性和消费级的价格优势,产品通用性强,可广泛使用于如工业、物流、移动机器人、商业、安全、教育等多种应用场景。
1.2 GM461-E1 IO线和数据线定义
1.2.1 IO接口定义

相机的电源&数据接口线定义如下:

1.2.2 数据接口线
GM461-E1相机数据线如下图:

1.2.3 GM461-E1相机正面安装方向
GM461-E1相机正面安装方向如下:

从左到右依次是左IR镜头,RGB相机,散斑投射器,右IR镜头。
1.2.4 GM461相机连接拓扑网络
GM461相机拓扑网络如下图:

1.2.5 上下面螺纹孔安装


GM461-E1相机上下面有一组M3螺纹孔(螺纹深度5mm)
1.3 GM461-E1相机性能指标
GM461-E1相机的性能指标如下图:

2.GM461-E1相机调参技巧
1.GM461-E1相机,需要搭配图漾新版本的看图软件使用,可联系图漾技术获取。
2.新的看图软件详细操作,可查看此链接:新版看图软件操作手册
2.1 深度图滤波设置
建议在开启相机取流前,打开散斑滤波设置开关。

2.2 如何调整相机左右IR的参数?
首先需要开启左右取流:

2.2.1 手动调整左右IR曝光

2.2.2 调整相机左右IR自动曝光

根据设置的AOI 区域的图像信息,来调整整个画面的亮度。
1. 如果检测到划定区域的亮度较低,算法“觉得”应该增强亮度,于是会调亮图像画面。
2. 如果检测到划定区域的亮度较亮,算法“觉得”应该减弱亮度,于是会调暗图像画面。

2.3 调试深度图
2.3.1 查看深度值
打开深度取图开关,点击 按钮开始采图
按钮开始采图
2.将鼠标放置于深度图上,即可查看当前像素点对应的像素坐标与实际深度值(单位:mm)。

2.3.2 渲染范围调节方法
深度图支持动态渲染范围调整。通过优化目标深度区间的色彩映射,显著增强深度细节的可辨识度。
1.通过上滑块调节渲染深度上限,通过下滑块调节渲染深度下限。
2.直接在输入框键入目标值,或通过箭头微调。

2.3.3 调节深度图渲染效果
1.深度值位于下滑块值和上滑块值之间时,色彩梯度均匀分布;
2.深度值小于下滑块值显示为红色,深度值大于上滑块值显示为紫色。
当场景深度集中分布在 400-800 mm 区间时:
使用默认渲染范围(0-5000 mm):如下方左图所示,色彩梯度平缓,细节难以区分**。
缩小范围至400–800mm:如下方右图所示,色彩对比鲜明,可清晰辨识三个物体的深度差异。

2.4 保存图像
2.4.1 存图设置
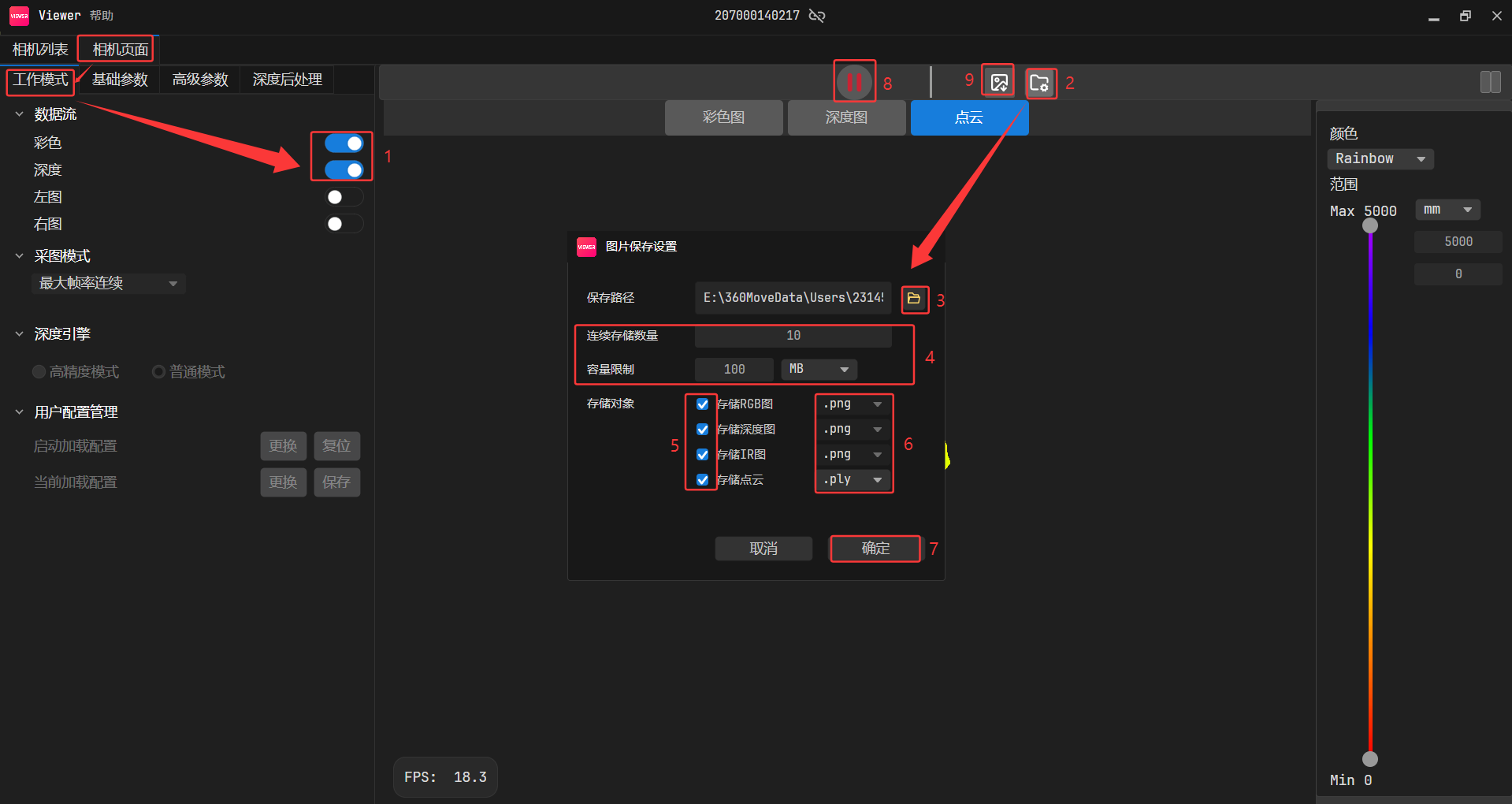
新的Percipio Viewer支持保存当前帧图像,可同时保存彩色图、深度图、渲染后的深度图、左/右IR图、点云数据
(.ply/.pcd格式)。
操作步骤:
1.点击 ,弹出保存图片设置对话框。
,弹出保存图片设置对话框。
2.点击 ,选择存图文件夹,并点击 “确定"。
,选择存图文件夹,并点击 “确定"。
2.4.2 单张存图

2.4.3 连续存图
2.5 GM461-E1相机保存参数配置
保存相机参数配置,上电加载参数,具体操作流程如下图:

2.6 GM461-E1相机参数补充说明
1.开启DepthSgbmSaturateFilterEnable、DepthSgbmTextureFilterEnable这两个后处理后,深度图像帧率会减半
2.Userset默认配置是输出固定帧率,可设置帧率范围:[4,15] 或 [8,30]。
3.在相同场景和参数配置下,切换分辨率会导致深度图像处理效果出现差异。
这是由于深度后处理算法(如饱和度滤波、纹理滤波)的内部计算是基于像素的。如需不同分辨率呈现近似深度效果,可采用以下方案:
1).关闭深度后处理:直接禁用相关滤波功能。
2).手动参数适配:开启后处理时,需按分辨率比例手动调整参数值。例如:640×400 分辨率下,参数设置为7。切换至 1280×800分辨率时,应将参数调整为28。
3.GM461-E1相机SDK相关
GM461-E1相机,推荐使用的编程语言和SDK版本如下:
3.1 C++语言SDK(推荐)
GM461-E1相机,只能搭配4.X.X版本的SDK使用,如果相机固件是106版本之后的,需要配合使用最新版本的SDK(4.1.9版本及以上)、最新版本的Viewer。
具体操作和Sample和案例,可打开如下链接:
1.图漾相机4.X.X版本C++语言SDK
2.图漾官网C++语言教程
3.2 ROS1版本(推荐)
GM461-E1相机,只能搭配4.X.X版本的SDK使用,如果相机固件是106版本之后的,需要配合使用最新版本的SDK(4.1.9版本及以上)、最新版本的Viewer。
具体操作和Sample和案例,可打开如下链接:
图漾相机-ROS1_SDK_ubuntu 4.X.X版本编译
图漾官网ROS1教程
3.3 ROS2版本(推荐)
GM461-E1相机,只能搭配4.X.X版本的SDK使用,如果相机固件是106版本之后的,需要配合使用最新版本的SDK(4.1.9版本及以上)、最新版本的Viewer。
具体操作和Sample和案例,可打开如下链接:
图漾相机-ROS2-SDK-Ubuntu 4.X.X版本编译
图漾官网ROS2教程
3.4 C#语言SDK
新的看图软件,自带的C#例程比较简陋,暂时不推荐使用。
3.5 Python语言SDK
新的看图软件,自带的Python例程比较简陋,暂时不推荐使用。

4.GM461-E1相机常见FAQ
4.1 如何获取GM461-E1相机内参?
4.1.1 方法一
编译C++语言中的sample_read_calibration_data例子,之后运行,会打印GM461相机的内参。
4.1.2 方法二
使用本贴子中的x64压缩包,通过鼠标右键+shift键,进入到PowerShell界面,运行sample_read_calibration_data例子,详细步骤如下:

4.2 GM461-E1相机内参说明
运行sample_read_calibration_data例子,打印出来的内参如下:
DepthIntrinsicWidth: 1280IntrinsicHeight: 800Intrinsic:Camera intrinsic parameter matrix (3x3) containing focal lengths (fx,fy) and principal point (cx,cy). Stored as 9 double values in row-major order.849.295362 0.000000 631.8216020.000000 849.295362 395.6066000.000000 0.000000 1.000000No rectifyed intrinsic data.No rotation data.No distortion data.No extrinsic data.
TextureIntrinsicWidth: 1280IntrinsicHeight: 960Intrinsic:Camera intrinsic parameter matrix (3x3) containing focal lengths (fx,fy) and principal point (cx,cy). Stored as 9 double values in row-major order.803.841137 0.000000 629.1075030.000000 803.935828 508.9468340.000000 0.000000 1.000000No rectifyed intrinsic data.No rotation data.Distortion:Camera distortion coefficients (12x1 vector) including radial (k1-k6), tangential (p1-p2), and prism (s1-s4) distortions. Stored as 12 double values.0.231750 0.729891 -0.003311 0.002787 0.887200 0.258638 0.633182 0.999489 -0.003283 0.000037 0.002828 0.000965Extrinsic:Camera extrinsic matrix (4x4) containing rotation and translation relative to world coordinate system. Stored as 16 double values in row-major order.0.999979 0.002164 0.006161 10.500958-0.002104 0.999951 -0.009630 0.064701-0.006182 0.009617 0.999935 -0.3746390.000000 0.000000 0.000000 1.000000
LeftIntrinsicWidth: 1280IntrinsicHeight: 800Intrinsic:Camera intrinsic parameter matrix (3x3) containing focal lengths (fx,fy) and principal point (cx,cy). Stored as 9 double values in row-major order.846.596971 0.000000 630.8922950.000000 846.503802 397.1611030.000000 0.000000 1.000000Rectifyed intrinsic:Rectified camera intrinsic parameter matrix (3x3) after distortion correction. Contains modified focal lengths and principal point. Stored as 9 double values.849.295362 0.000000 631.8216020.000000 849.295362 395.6066000.000000 0.000000 1.000000Rotation:Camera rotation matrix (3x3) representing orientation in 3D space. Orthonormal matrix with determinant +1. Stored as 9 double values in row-major order.0.999997 -0.002445 -0.0008690.002448 0.999990 0.0037200.000860 -0.003722 0.999993Distortion:Camera distortion coefficients (12x1 vector) including radial (k1-k6), tangential (p1-p2), and prism (s1-s4) distortions. Stored as 12 double values.-0.065113 0.009064 -0.000904 -0.000084 0.598195 -0.126516 0.127444 0.540535 -0.000395 0.000427 -0.000143 0.000617Extrinsic:Camera extrinsic matrix (4x4) containing rotation and translation relative to world coordinate system. Stored as 16 double values in row-major order.1.000000 0.000000 0.000000 0.0000000.000000 1.000000 0.000000 0.0000000.000000 0.000000 1.000000 0.0000000.000000 0.000000 0.000000 1.000000
RightIntrinsicWidth: 1280IntrinsicHeight: 800Intrinsic:Camera intrinsic parameter matrix (3x3) containing focal lengths (fx,fy) and principal point (cx,cy). Stored as 9 double values in row-major order.845.633045 0.000000 631.4510000.000000 845.635807 395.1120980.000000 0.000000 1.000000Rectifyed intrinsic:Rectified camera intrinsic parameter matrix (3x3) after distortion correction. Contains modified focal lengths and principal point. Stored as 9 double values.849.295362 0.000000 631.8216020.000000 849.295362 395.6066000.000000 0.000000 1.000000Rotation:Camera rotation matrix (3x3) representing orientation in 3D space. Orthonormal matrix with determinant +1. Stored as 9 double values in row-major order.0.999985 -0.005487 -0.0008760.005484 0.999978 -0.0037230.000896 0.003718 0.999993Distortion:Camera distortion coefficients (12x1 vector) including radial (k1-k6), tangential (p1-p2), and prism (s1-s4) distortions. Stored as 12 double values.-0.060512 0.028435 -0.001911 -0.000879 0.599802 -0.119581 0.137869 0.548687 0.000119 0.000392 0.002222 0.000146Extrinsic:Camera extrinsic matrix (4x4) containing rotation and translation relative to world coordinate system. Stored as 16 double values in row-major order.0.999995 0.003036 0.000048 -65.960244-0.003036 0.999968 0.007443 0.361959-0.000025 -0.007443 0.999972 0.0577690.000000 0.000000 0.000000 1.000000
4.2.1 深度图内参
DepthIntrinsicWidth: 1280IntrinsicHeight: 800Intrinsic:Camera intrinsic parameter matrix (3x3) containing focal lengths (fx,fy) and principal point (cx,cy). Stored as 9 double values in row-major order.849.295362 0.000000 631.8216020.000000 849.295362 395.6066000.000000 0.000000 1.000000No rectifyed intrinsic data.No rotation data.No distortion data.No extrinsic data.

1.cx和cy通常大约是图像分辨率W和H的一半,得出GM461相机深度图出厂标定分辨率为1280x800
2.由于深度相机是虚拟相机,所以其畸变参数以及外参都是零矩阵。
4.2.2 彩色图内参/畸变系数/外参
TextureIntrinsicWidth: 1280IntrinsicHeight: 960Intrinsic:Camera intrinsic parameter matrix (3x3) containing focal lengths (fx,fy) and principal point (cx,cy). Stored as 9 double values in row-major order.803.841137 0.000000 629.1075030.000000 803.935828 508.9468340.000000 0.000000 1.000000No rectifyed intrinsic data.No rotation data.Distortion:Camera distortion coefficients (12x1 vector) including radial (k1-k6), tangential (p1-p2), and prism (s1-s4) distortions. Stored as 12 double values.0.231750 0.729891 -0.003311 0.002787 0.887200 0.258638 0.633182 0.999489 -0.003283 0.000037 0.002828 0.000965Extrinsic:Camera extrinsic matrix (4x4) containing rotation and translation relative to world coordinate system. Stored as 16 double values in row-major order.0.999979 0.002164 0.006161 10.500958-0.002104 0.999951 -0.009630 0.064701-0.006182 0.009617 0.999935 -0.3746390.000000 0.000000 0.000000 1.000000
1.cx和cy通常大约是图像分辨率W和H的一半,得出GM461相机深度图出厂标定分辨率为1280x960
2.彩色图相机的畸变系数如下:

用TYGetEnum(hDevice, comp_id, TY_ENUM_LENS_OPTICAL_TYPE, &lens_tpye)来区分新旧相机。//TY_LENS_PINHOLE是小孔成像,RGB畸变系数依次是k1,k2,p1,p2,k3,k4,k5,k6,s1,s2,s3,s4//TY_LENS_FISHEYE是新的鱼眼标定,RGB畸变系数依次是k1,k2,k3,k4
3.彩色图相机的外参如下:

4.2.3 左右IR极限约束前内参/极限校正后内参

LeftIntrinsicWidth: 1280IntrinsicHeight: 800Intrinsic:Camera intrinsic parameter matrix (3x3) containing focal lengths (fx,fy) and principal point (cx,cy). Stored as 9 double values in row-major order.846.596971 0.000000 630.8922950.000000 846.503802 397.1611030.000000 0.000000 1.000000Rectifyed intrinsic:Rectified camera intrinsic parameter matrix (3x3) after distortion correction. Contains modified focal lengths and principal point. Stored as 9 double values.849.295362 0.000000 631.8216020.000000 849.295362 395.6066000.000000 0.000000 1.000000Rotation:Camera rotation matrix (3x3) representing orientation in 3D space. Orthonormal matrix with determinant +1. Stored as 9 double values in row-major order.0.999997 -0.002445 -0.0008690.002448 0.999990 0.0037200.000860 -0.003722 0.999993Distortion:Camera distortion coefficients (12x1 vector) including radial (k1-k6), tangential (p1-p2), and prism (s1-s4) distortions. Stored as 12 double values.-0.065113 0.009064 -0.000904 -0.000084 0.598195 -0.126516 0.127444 0.540535 -0.000395 0.000427 -0.000143 0.000617Extrinsic:Camera extrinsic matrix (4x4) containing rotation and translation relative to world coordinate system. Stored as 16 double values in row-major order.1.000000 0.000000 0.000000 0.0000000.000000 1.000000 0.000000 0.0000000.000000 0.000000 1.000000 0.0000000.000000 0.000000 0.000000 1.000000
RightIntrinsicWidth: 1280IntrinsicHeight: 800Intrinsic:Camera intrinsic parameter matrix (3x3) containing focal lengths (fx,fy) and principal point (cx,cy). Stored as 9 double values in row-major order.845.633045 0.000000 631.4510000.000000 845.635807 395.1120980.000000 0.000000 1.000000Rectifyed intrinsic:Rectified camera intrinsic parameter matrix (3x3) after distortion correction. Contains modified focal lengths and principal point. Stored as 9 double values.849.295362 0.000000 631.8216020.000000 849.295362 395.6066000.000000 0.000000 1.000000Rotation:Camera rotation matrix (3x3) representing orientation in 3D space. Orthonormal matrix with determinant +1. Stored as 9 double values in row-major order.0.999985 -0.005487 -0.0008760.005484 0.999978 -0.0037230.000896 0.003718 0.999993Distortion:Camera distortion coefficients (12x1 vector) including radial (k1-k6), tangential (p1-p2), and prism (s1-s4) distortions. Stored as 12 double values.-0.060512 0.028435 -0.001911 -0.000879 0.599802 -0.119581 0.137869 0.548687 0.000119 0.000392 0.002222 0.000146Extrinsic:Camera extrinsic matrix (4x4) containing rotation and translation relative to world coordinate system. Stored as 16 double values in row-major order.0.999995 0.003036 0.000048 -65.960244-0.003036 0.999968 0.007443 0.361959-0.000025 -0.007443 0.999972 0.0577690.000000 0.000000 0.000000 1.000000
4.3 GM461-E1相机光心位置
待补充
5.GM461-E1相机测试结果
5.1 GM461-E1 帧率测试
5.1.1 GM461-E1 出图延迟时间
出图延迟时间:相机使用默认UserSet,在连续采集模式下统计从开始曝光到系统完全处理完图像的总之时间,单位微秒。
说明:
Depth/Texture:Bin1- 1280x800,Bin2- 640x400,Bin4-320x200.
GM461相机出图延时时间测试结果如下所示:


5.1.2 GM461-E1 帧率测试
FPS(帧率):指相机设置在自由采集模式下,上位机每秒采集的图像帧数。
说明:
Depth/Texture:Bin1- 1280x800,Bin2- 640x400,Bin4-320x200.
GM461相机帧率测试结果如下所示:


6.其他学习资料
1. 图漾官网相机规格书
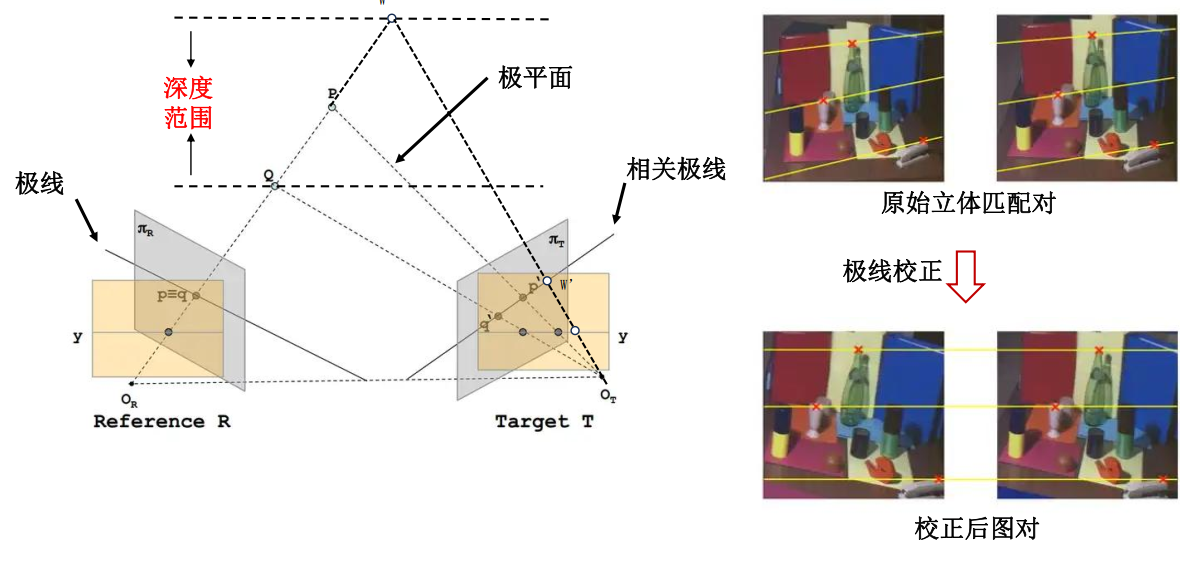
2.双目立体匹配入门【一】