基于信号分解的FMCW雷达相互干扰抑制——论文阅读
基于信号分解的FMCW雷达相互干扰抑制
A. Gaur, P. -H. Tseng, K. -T. Feng and S. Srirangarajan, “Signal Decomposition Based Mutual Interference Suppression in FMCW Radars,” in IEEE Open Journal of Vehicular Technology, vol. 6, pp. 2677-2692, 2025, doi: 10.1109/OJVT.2025.3610715.
摘要
随着频率调制连续波(FMCW)雷达在自动驾驶汽车中的应用日益增多,雷达间的相互干扰已成为一个严峻的挑战。这项工作提出了一种新颖的方法(被命名为 VAFER),旨在高效、简洁地抑制FMCW雷达的相互干扰。
该方法的核心流程如下:
首先,使用变分模式分解(VMD) 将接收到的信号分解为多个模式(modes)。接着,利用傅里叶同步压缩变换(FSST) 对这些模式进行时频分析。最后,通过在VMD模式的时频谱上应用一种新提出的基于能量-熵的阈值(energy-entropy-based thresholding) 操作,来重建抑制了干扰的信号。
该方法的有效性通过信干噪比(SINR)、相关系数和检测概率等指标进行了衡量。与现有的干扰抑制方法相比,所提出的VAFER方案在输出SINR方面表现出显著改进,仿真数据至少提高了15.46 dB,实验数据提高了9.87 dB。
I. 引言
FMCW雷达因其在恶劣天气下的鲁棒性、高性价比以及能同时测量距离、角度和速度的能力,已成为高级驾驶辅助系统(ADAS)的首选。然而,随着车辆上雷达数量的增加,雷达间的相互干扰问题变得异常严重。
本文的核心观察在于FMCW雷达信号的特性:
- 目标信号: 在基带处理中,目标回波表现为单音(tones),即恒定频率的拍频信号。
- 干扰信号: 来自具有不同线性调频斜率的外部FMCW雷达的干扰,在基带中则表现为线性调频信号(chirp)。
这种强干扰会抬高噪声基底,降低目标回波与背景噪声的可分离性,从而降低检测概率。
现有的干扰抑制方法主要分为三类:
- 协同方法: 通过修改雷达参数(如相位编码、MAC协议)来避免干扰,但这需要额外的协调单元。
- 新波形设计: 如跳频、正交噪声波形等,但这可能导致噪声基底增加。
- 信号处理算法: 这是本文的重点。包括正交投影滤波、矩阵束算法、小波变换、压缩感知(CS) 以及基于VMD/EMD的非平稳信号处理技术。
本文的贡献在于提出了一种名为 VAFER 的独特算法,它结合了VMD、FSST和能量-熵重建。该方法利用VMD将信号(目标音调和干扰调频)分解开,然后利用FSST的高时频分辨率特性进行分析,最后通过一种新颖的能量-熵阈值来自动丢弃包含干扰的模式,并重建干净的目标信号。
II. 信号模型与问题阐述
理解本文的关键在于其数学模型,该模型清晰地区分了目标和干扰。
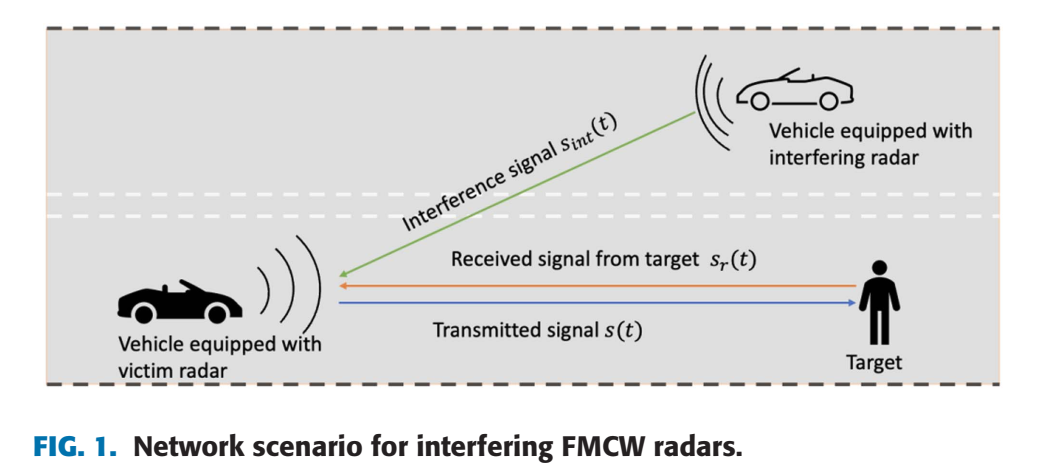
如图1所示,场景中有一个“受害雷达”、一个目标和一个“干扰雷达”。
目标信号模型
-
发射信号: 受害雷达发射一个归一化的线性调频信号 s(t)s(t)s(t):
s(t)=exp[j2π(fot+12μt2)]s(t) = \exp[j2\pi(f_{o}t + \frac{1}{2}\mu t^{2})]s(t)=exp[j2π(fot+21μt2)]
其中 fof_ofo 是起始频率,μ=B/T\mu = B/Tμ=B/T 是调频斜率。 -
目标回波: 从 QQQ 个目标反射的回波 sr(t)s_r(t)sr(t) 是发射信号的延迟叠加:
sr(t)=∑q=1Qαqexp[j2π(fo(t−τq)+12μ(t−τq)2)]s_{r}(t) = \sum_{q=1}^{Q}\alpha_{q}\exp[j2\pi(f_{o}(t-\tau_{q}) + \frac{1}{2}\mu(t-\tau_{q})^{2})]sr(t)=q=1∑Qαqexp[j2π(fo(t−τq)+21μ(t−τq)2)]
其中 αq\alpha_qαq 是复幅度,τq\tau_qτq 是传播延迟。 -
去调频(De-chirping): 接收到的回波 sr(t)s_r(t)sr(t) 与发射信号的共轭 s∗(t)s^*(t)s∗(t) 相乘,得到目标拍频信号 sb(t)s_b(t)sb(t):
sb(t)=sr(t)⋅s∗(t)=∑q=1Qαqexp[j2π(−foτq−μtτq+μτq22)]s_{b}(t) = s_{r}(t) \cdot s^{*}(t) = \sum_{q=1}^{Q}\alpha_{q}\exp[j2\pi(-f_{o}\tau_{q} - \mu t\tau_{q} + \frac{\mu\tau_{q}^{2}}{2})]sb(t)=sr(t)⋅s∗(t)=q=1∑Qαqexp[j2π(−foτq−μtτq+2μτq2)]
干扰信号模型
-
干扰信号: 来自 MMM 个干扰雷达的信号 sint(t)s_{int}(t)sint(t),它们具有不同的起始频率 fmf_mfm 和调频斜率 βm\beta_mβm:
sint(t)=∑m=1Mexp[j2π(fm(t−τm′)+12βm(t−τm′)2)]s_{int}(t) = \sum_{m=1}^{M}\exp[j2\pi(f_{m}(t-\tau_{m}^{\prime}) + \frac{1}{2}\beta_{m}(t-\tau_{m}^{\prime})^{2})]sint(t)=m=1∑Mexp[j2π(fm(t−τm′)+21βm(t−τm′)2)] -
去调频(De-chirping): 关键在于,这个干扰信号 sint(t)s_{int}(t)sint(t) 被受害雷达的 s∗(t)s^*(t)s∗(t) 进行去调频,得到干扰拍频信号 sb,int(t)s_{b,int}(t)sb,int(t)。
推导 sb,int(t)=sint(t)⋅s∗(t)s_{b,int}(t) = s_{int}(t) \cdot s^*(t)sb,int(t)=sint(t)⋅s∗(t),提取时变项,可得(公式5):
sb,int(t)=∑m=1MαIexp[j2π((fm−fo−βmτm′)t+12(βm−μ)t2)]s_{b,int}(t) = \sum_{m=1}^{M}\alpha_{I}\exp[j2\pi((f_{m}-f_{o}-\beta_{m}\tau_{m}^{\prime})t + \frac{1}{2}(\beta_{m}-\mu)t^{2})]sb,int(t)=m=1∑MαIexp[j2π((fm−fo−βmτm′)t+21(βm−μ)t2)]
问题的核心:瞬时频率
在信号通过低通滤波器(LPF)h(t)h(t)h(t) 后,总的基带信号 r~b(t)\tilde{r}_b(t)r~b(t) 是目标信号、干扰信号和噪声 η(t)\eta(t)η(t) 之和。
本文通过求相位对时间的导数,来分析目标和干扰的瞬时拍频:
-
目标瞬时频率 fb(t)f_b(t)fb(t) (公式9):
fb(t)=12πddt(phase[sb(t)])=−μτqf_{b}(t) = \frac{1}{2\pi}\frac{d}{dt}(\text{phase}[s_b(t)]) = -\mu\tau_qfb(t)=2π1dtd(phase[sb(t)])=−μτq
这是一个常数。因此,目标在时频图上表现为水平的直线(单音)。 -
干扰瞬时频率 fb,int(t)f_{b,int}(t)fb,int(t) (公式8):
fb,int(t)=12πddt(phase[sb,int(t)])=(fm−fo−βmτm′)+(βm−μ)tf_{b,int}(t) = \frac{1}{2\pi}\frac{d}{dt}(\text{phase}[s_{b,int}(t)]) = (f_{m}-f_{o}-\beta_{m}\tau_{m}^{\prime}) + (\beta_{m}-\mu)tfb,int(t)=2π1dtd(phase[sb,int(t)])=(fm−fo−βmτm′)+(βm−μ)t
这是一个随时间 ttt 线性变化的频率(假设 βm≠μ\beta_m \neq \muβm=μ)。因此,干扰在时频图上表现为倾斜的直线(Chirp)。
本文的目标就是利用这种时频特性的根本差异(目标=平稳单音 vs. 干扰=非平稳Chirp),设计一个信号处理方案来分离它们。
III. 提出的VAFER方案
VAFER 算法是本文的核心,它由三个步骤组成。
A. 变分模式分解 (VMD)
第一步是分解信号。VMD 是一种自适应信号分解技术,它将多分量信号 r~b(t)\tilde{r}_b(t)r~b(t) 分解为 KKK 个窄带的变分模式函数(VMFs)uk(t)u_k(t)uk(t)。 选择VMD是因为它能将不同的单音频率(目标信号)映射到各自独立的模式中。与EMD等方法相比,VMD对噪声更鲁棒,不易产生模式混叠。
VMD的数学原理是通过求解一个约束变分问题来实现分解。其目标是最小化所有模式的估计带宽之和,约束条件是所有模式相加必须等于原始信号。
VMD的代价函数 (公式10) 如下:
minuk,ωk{∑k=1K∥∂t[(δ(t)+jπt)∗uk(t)]e−jωkt∥22}\min_{{u_k}, {\omega_k}} \left\{ \sum_{k=1}^{K} \left\| \partial_t \left[ \left(\delta(t) + \frac{j}{\pi t}\right) * u_k(t) \right] e^{-j\omega_k t} \right\|_2^2 \right\}uk,ωkmin{k=1∑K∂t[(δ(t)+πtj)∗uk(t)]e−jωkt22}
s.t.∑k=1Kuk(t)=r~b(t)\text{s.t.} \sum_{k=1}^{K} u_k(t) = \tilde{r}_{b}(t)s.t.k=1∑Kuk(t)=r~b(t)
这个公式的内部项 [(δ(t)+j/(πt))∗uk(t)][(\delta(t) + j/(\pi t)) * u_k(t)][(δ(t)+j/(πt))∗uk(t)] 是通过希尔伯特变换计算模式 uku_kuk 的解析信号。e−jωkte^{-j\omega_k t}e−jωkt 将其频谱移至中心频率 ωk\omega_kωk。∂t\partial_t∂t(导数)和 L2L_2L2 范数共同估计该模式的带宽。为了求解,通过引入二次惩罚因子 α\alphaα 和拉格朗日乘子 λ(t)\lambda(t)λ(t)(公式11),将问题转为无约束优化。然后使用交替方向乘子法(ADMM)在频域中迭代更新 u^k(ω)\hat{u}_k(\omega)u^k(ω) 和 ωk\omega_kωk(公式12, 13),直至收敛。
B. 傅里叶同步压缩变换 (FSST)
分解得到 KKK 个 VMFs 后,第二步是对每一个 uku_kuk 进行时频分析。
之所以选择FSST而不是常规的STFT,是因为FSST 是一种时频重分配技术,它能将STFT的能量“压缩”到信号的瞬时频率上,从而极大地锐化时频表示。
FSST的效果非常关键:
- 对于包含目标(单音)的VMF,FSST会将其表示为一条非常清晰、能量集中的水平线。
- 对于包含干扰(Chirp或噪声)的VMF,FSST会将其表示为模糊的、能量分散的“噪声团”。
FSST的数学原理首先计算 uku_kuk 的STFT(公式16),然后计算STFT谱的质心(瞬时频率)ω^uk(t,ω)\hat{\omega}_{u_{k}}(t,\omega)ω^uk(t,ω),最后将能量从 ω\omegaω 重新分配到 ω^uk\hat{\omega}_{u_k}ω^uk,得到 Uk(t,ω)U_k(t, \omega)Uk(t,ω)(公式18)。
C. 能量-熵阈值与重建
第三步是自动区分“好”模式(目标)和“坏”模式(干扰)。本文提出使用维纳熵(Wiener entropy),它是衡量频谱平坦度(或“尖峰度”)的指标。
根据本文的逻辑,目标模式在FSST谱中表现为单音,能量集中,频谱“尖锐”;而干扰模式能量分散,频谱更“平坦”。
维纳熵计算 (公式19) 如下:
W(Uk(t,ω))=[∏i=1N∏j=1F∣Uk(ti,ωj)∣2]1/NF1NF∑i=1N∑j=1F∣Uk(ti,ωj)∣2W(U_{k}(t,\omega))=\frac{[\prod_{i=1}^{N}\prod_{j=1}^{F}|U_{k}(t_{i},\omega_{j})|^{2}]^{1/NF}}{\frac{1}{NF}\sum_{i=1}^{N}\sum_{j=1}^{F}|U_{k}(t_{i},\omega_{j})|^{2}}W(Uk(t,ω))=NF1∑i=1N∑j=1F∣Uk(ti,ωj)∣2[∏i=1N∏j=1F∣Uk(ti,ωj)∣2]1/NF
这是FSST功率谱的几何平均值与算术平均值之比。
为了使阈值 TβT_{\beta}Tβ 更鲁棒,本文使用每个模式的能量 Ek=∫∣uk(t)∣2dtE_k = \int |u_k(t)|^2 dtEk=∫∣uk(t)∣2dt 作为权重,计算维纳熵的加权平均值,从而得到一个动态阈值 (公式20):
Tβ=∑k=1KEk⋅W(Uk(t,ω))∑k=1KEkT_{\beta}=\frac{\sum_{k=1}^{K}E_{k}\cdot W(U_{k}(t,\omega))}{\sum_{k=1}^{K}E_{k}}Tβ=∑k=1KEk∑k=1KEk⋅W(Uk(t,ω))
最后,进行信号重建(公式22, 23)。保留所有维纳熵 W(Uk)W(U_k)W(Uk) 大于等于 TβT_{\beta}Tβ 的模式,并丢弃其余的干扰模式。将保留的模式通过逆FSST相加,即可重建出干净的信号 r^b(t)\hat{r}_b(t)r^b(t)。
IV. 性能评估
本节通过仿真和实验数据,将VAFER与ANC、SPARKLE、WD、Bi-l1l_1l1 和VAFER-STFT(使用STFT代替FSST的变体) 进行比较。
仿真结果
仿真设置了4个目标(10, 16, 30, 50米)和2个干扰源。
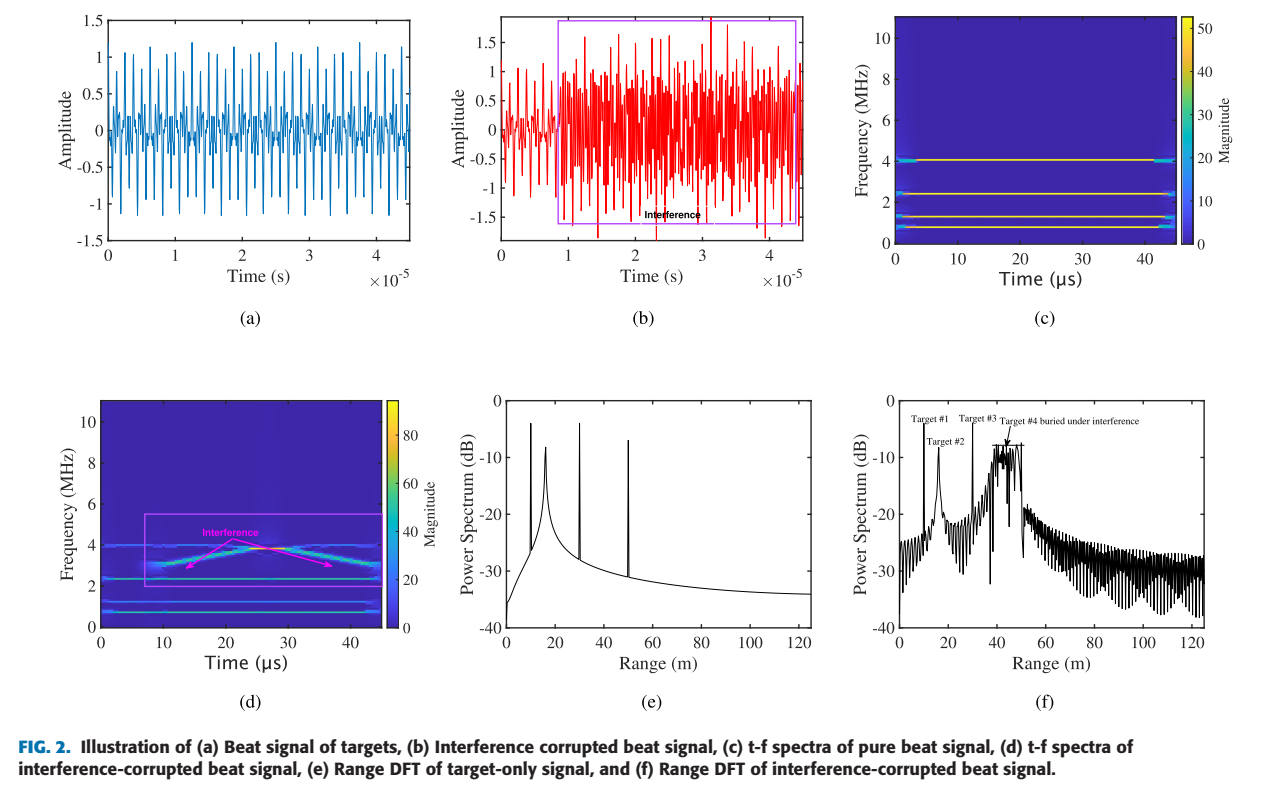
- 图 2 显示了干扰的严重影响。
- (a) 是纯净的目标信号时域波形。
- © 和 (e) 是纯净信号的时频谱(4条清晰的水平线)和距离DFT(4个尖锐的峰值)。
- (b) 是被干扰污染后的时域波形。
- (d) 和 (f) 是受干扰信号的时频谱和距离DFT。在时频图 (d) 中,目标线被干扰(倾斜的条纹)所掩盖。在距离DFT (f) 中,噪声基底被大幅抬高,导致50米处的第4个目标(Target #4)完全被干扰淹没。
接下来展示VAFER算法的中间步骤。
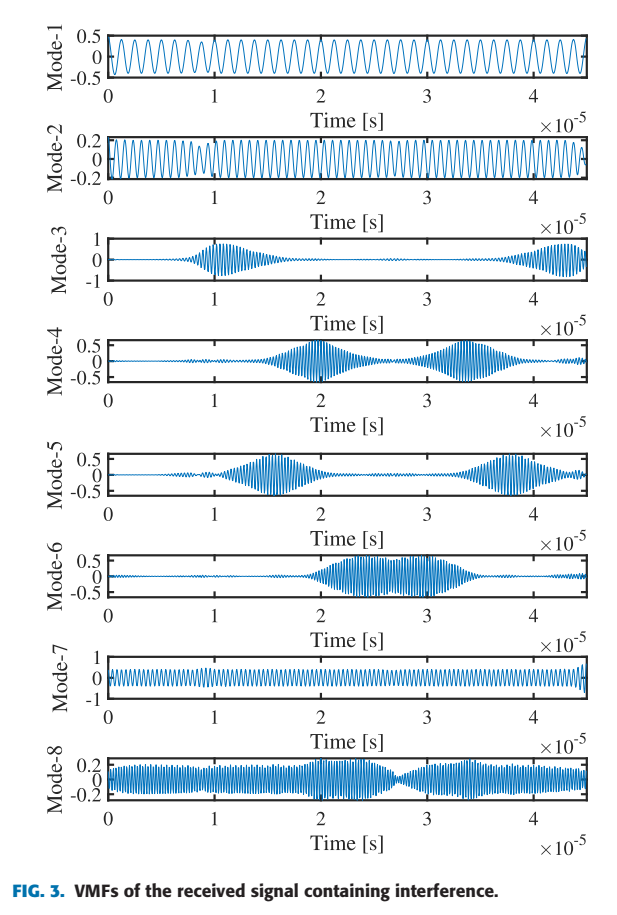
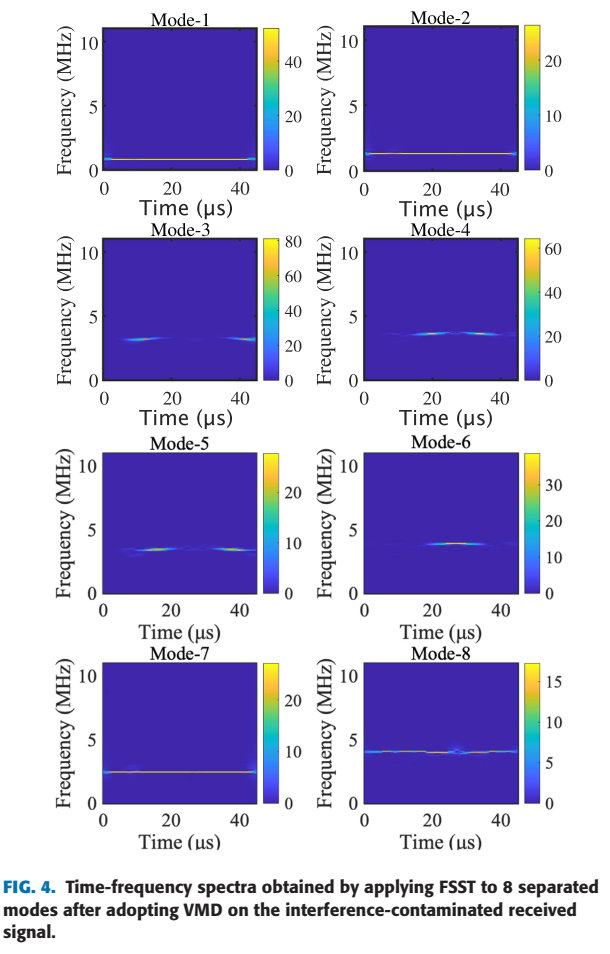
- 图 3 和 图 4 展示了VAFER的效果。
- VMD(图3): 信号被分解为8个模式。肉眼可见,模式1, 2, 7, 8 是平稳的正弦波(代表4个目标),而模式3, 4, 5, 6 是非平稳的(代表干扰)。
- FSST(图4): 目标模式(1, 2, 7, 8)被FSST锐化为极其清晰、能量集中的水平线。而干扰模式(3, 4, 5, 6)则呈现为能量分散的“污迹”。这种巨大的差异使得基于熵的阈值分离变得非常容易且可靠。
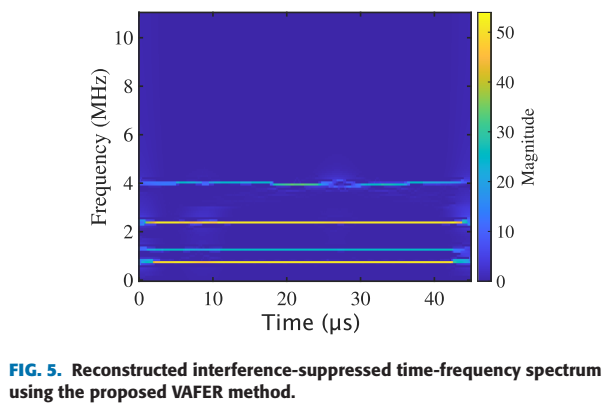
- 图 5 显示了重建后的时频谱。干扰污迹被完全去除,只留下4条清晰的目标线,证明干扰模式被成功丢弃。
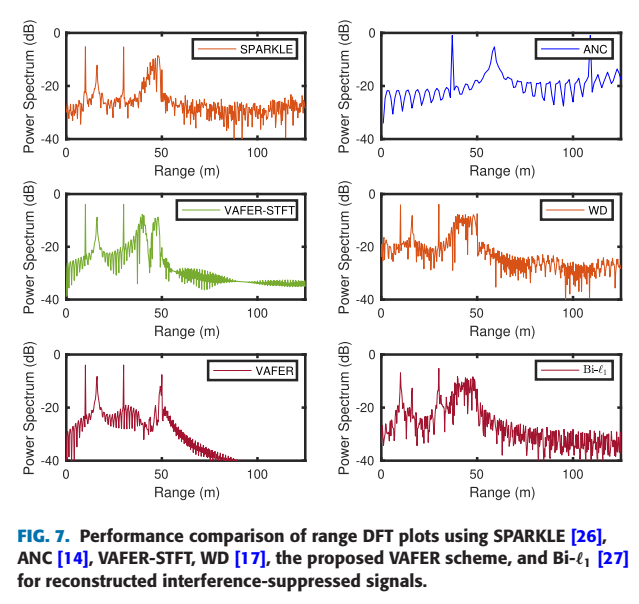
- 图 7 是一维距离像的关键性能对比。
- ANC、WD、SPARKLE、Bi-l1l_1l1 和VAFER-STFT 方法的距离像中,均存在不同程度的残留干扰或噪声基底抬高。
- VAFER(左下角)的距离像中,噪声基底被显著压低,并且之前在图2(f)中被淹没的50米处目标被清晰地检测出来,峰值锐利。
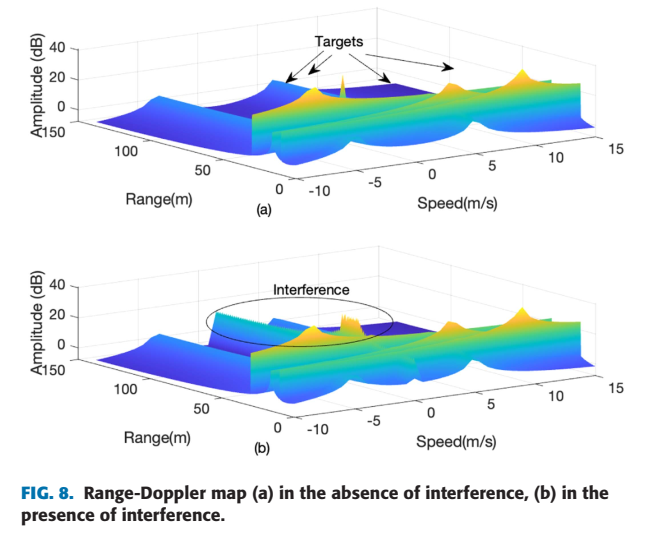
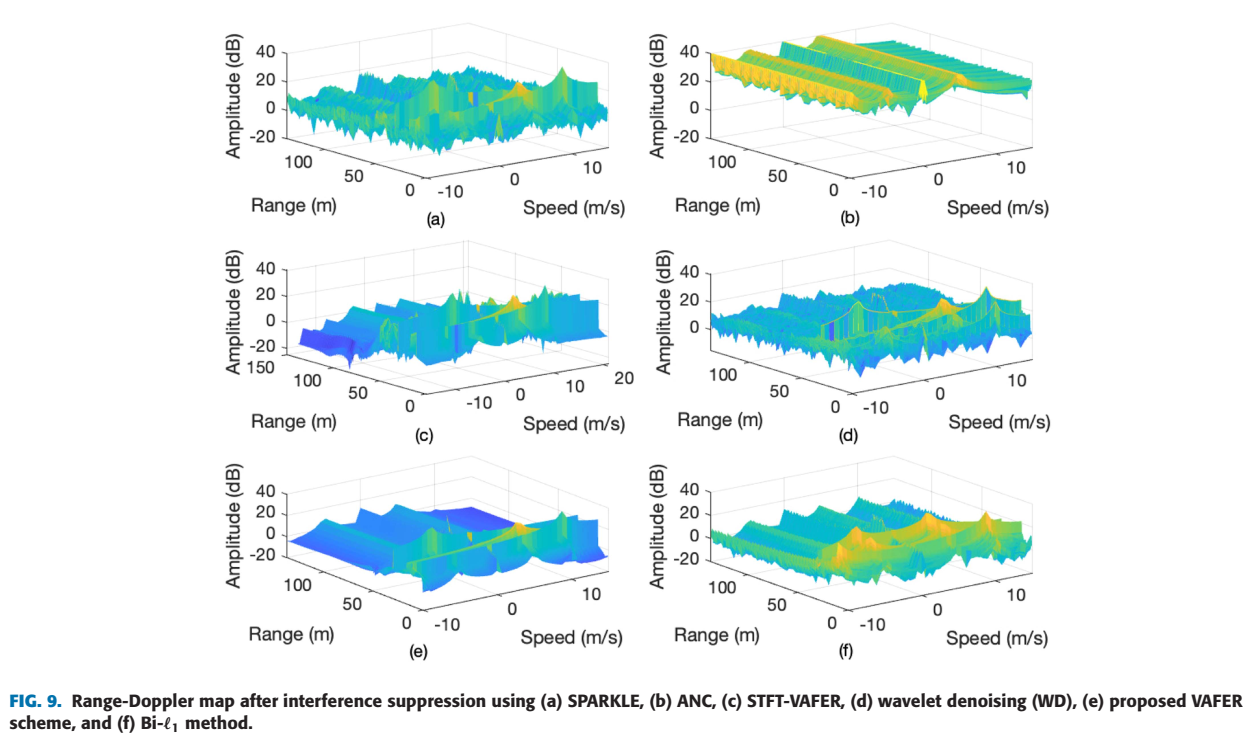
- 图 8 和 图 9 展示了对移动目标(距离-多普勒)的处理效果。
- 图8(a)是纯净的R-D图,(b)显示在原始干扰下,位于(50米, 0米/秒)的静止目标被干扰完全覆盖。
- 图9中,(a) SPARKLE、(b) ANC、© VAFER-STFT、(d) WD、(f) Bi-l1l_1l1 均未能有效恢复该目标。
- VAFER(图9(e))再次展示了其优越性,干扰被完全抑制,所有4个目标在R-D图上都清晰可见。
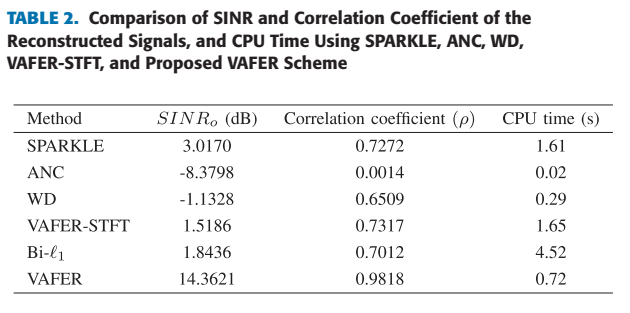
量化结果(表2): VAFER 取得了最高的 SINROSINR_OSINRO(14.3621 dB)和相关系数 ρ\rhoρ(0.9818)。
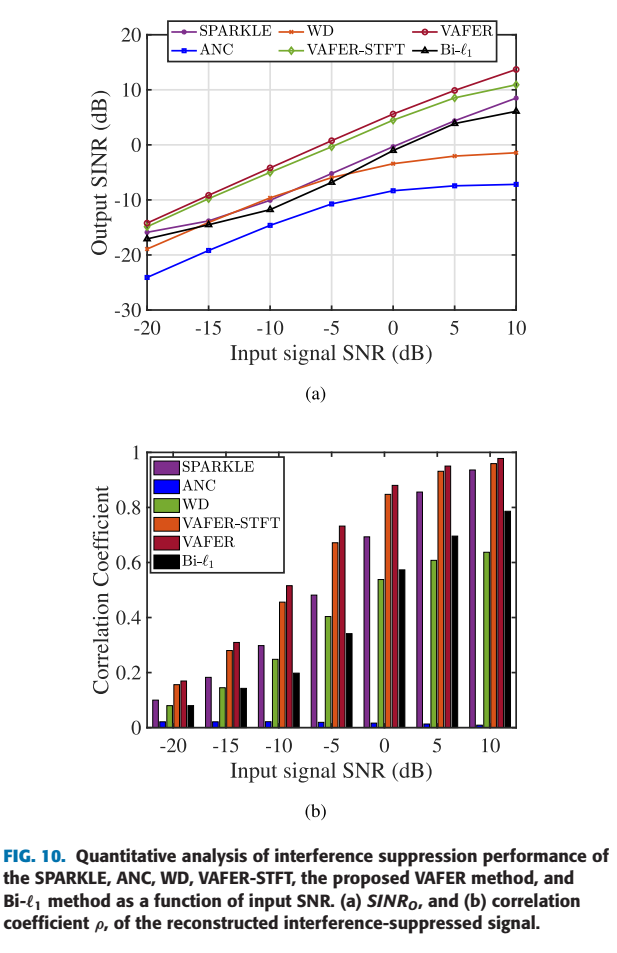
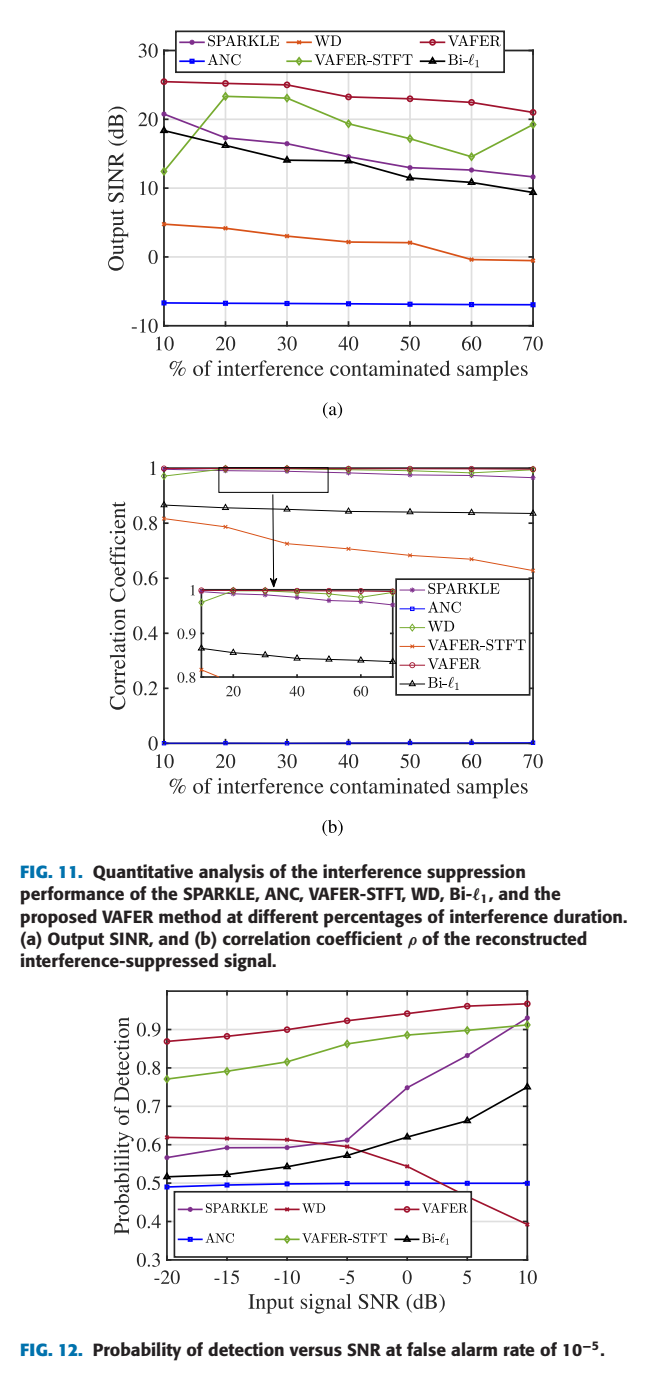
- 图 10, 11, 12 的鲁棒性分析表明,在不同的输入SNR和不同的干扰污染比例下,VAFER(图例中的VAFER线,通常是红色或紫色)的性能始终全面优于其他所有方法。
实验结果
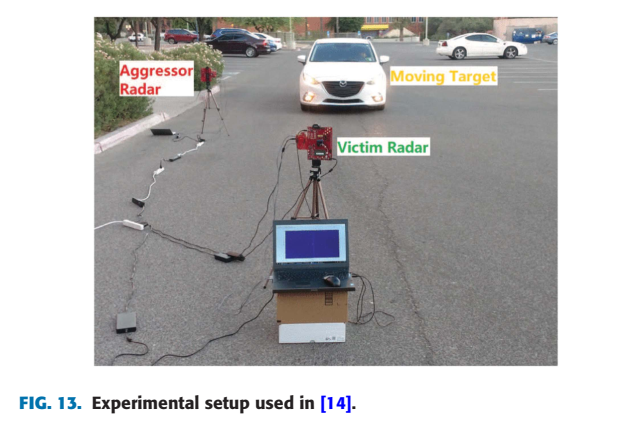
- 图 13 显示了实验设置,使用来自真实场景的公开数据。目标是一辆以15米/秒驶近的汽车,干扰源在2米处。
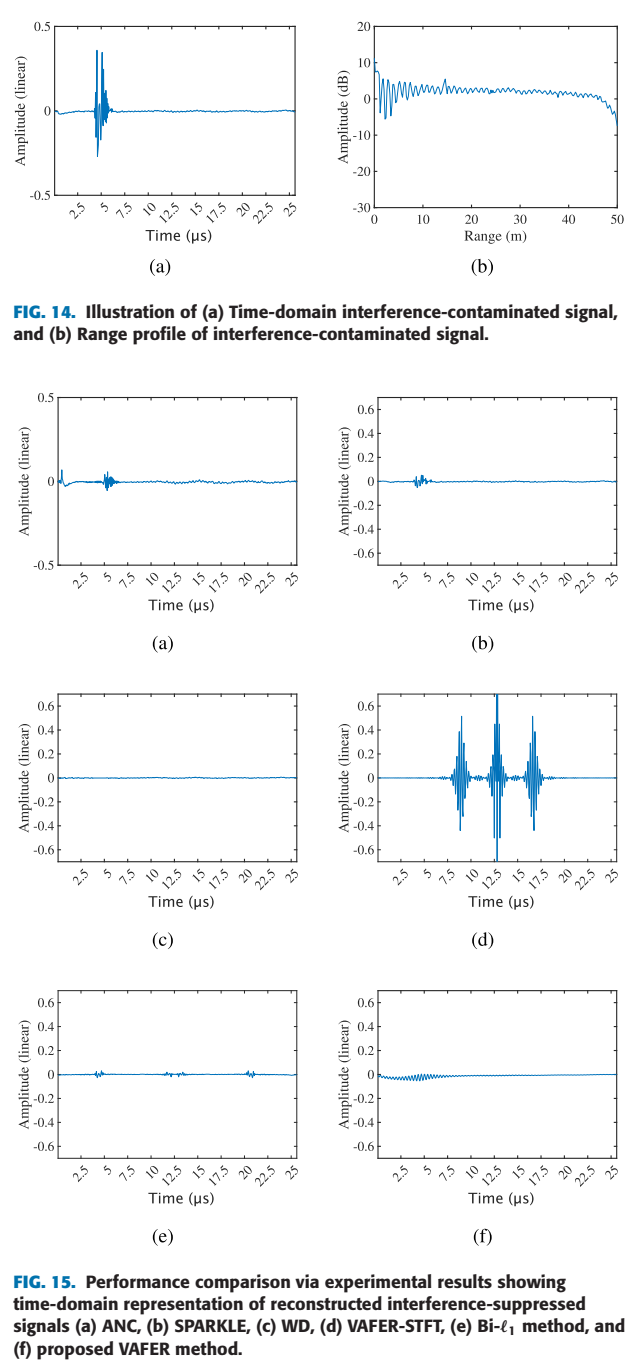
-
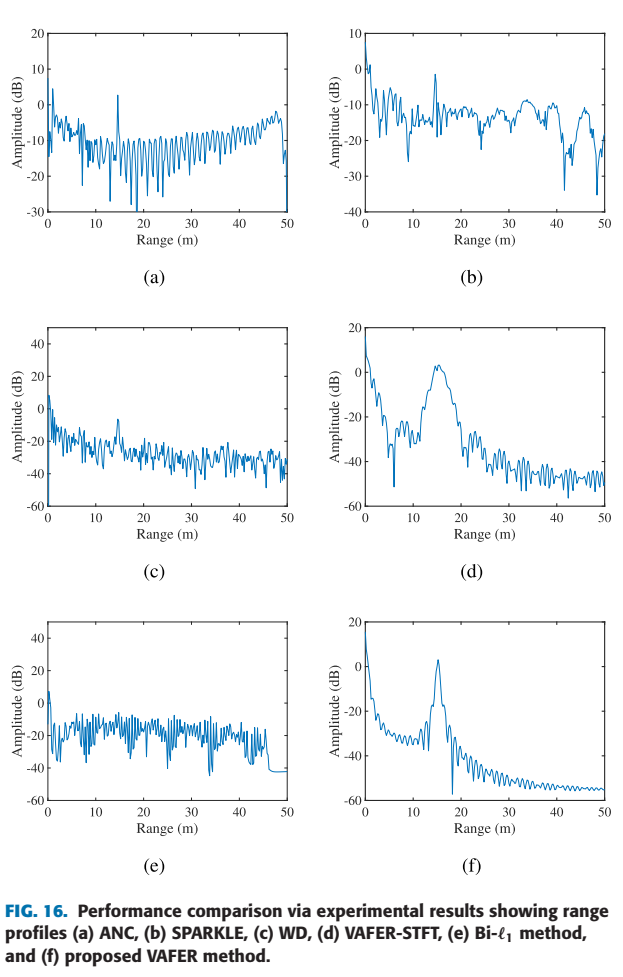
图 14, 15, 16 是实验数据的对比。
- 图14(b)是原始距离剖面,目标(应在14.8米)被噪声淹没,无法辨识。
- 图16(关键对比):
- (a) ANC、(b) SPARKLE、(e) Bi-l1l_1l1 不仅未能清晰检测目标,还在2米处(干扰源位置)产生了虚假目标峰。
- © WD 导致目标峰值幅度过低,这归因于信号失真。
- (d) VAFER-STFT 几乎无效,干扰依然存在。
- (f) VAFER: 结果非常干净。干扰和虚假目标被完全抑制,在14.8米处清晰地显示了唯一的真实目标峰值。
-
量化结果(实验): 原始SINR为2.94 dB。VAFER方法将SINR提高到12.81 dB,净增益为 9.87 dB,显著优于所有其他方法。
V. 结论
本文提出了一种基于VMD和FSST的FMCW雷达干扰抑制方法——VAFER。该方法的核心是利用VMD将信号分解为包含“单音目标”和“调频干扰”的模式,然后利用FSST的锐化时频表示,最后通过一个新颖的能量-熵阈值自动分离并剔除干扰模式。
仿真和真实实验数据均证实,VAFER方案在提高输出SINR和相关系数方面,性能显著优于多种现有的先进算法,能够有效抑制干扰且不对目标信号造成可观察的性能下降。
附录:关键推导
论文在第二节(II. 信号模型)中给出了目标和干扰瞬时频率的最终表达式(公式8和9),但省略了推导过程。这个推导是理解本文核心(目标=单音 vs 干扰=Chirp)的基石。
1. 目标拍频信号 (Beat Signal) 及其瞬时频率
-
受害雷达发射信号 s(t)s(t)s(t) (忽略幅度) :
s(t)=exp[j2π(fot+12μt2)]s(t) = \exp[j2\pi(f_{o}t + \frac{1}{2}\mu t^{2})]s(t)=exp[j2π(fot+21μt2)]
其共轭为 s∗(t)=exp[−j2π(fot+12μt2)]s^*(t) = \exp[-j2\pi(f_{o}t + \frac{1}{2}\mu t^{2})]s∗(t)=exp[−j2π(fot+21μt2)] -
从目标 qqq 返回的回波 sr(t)s_r(t)sr(t) (延迟 τq\tau_qτq) :
sr(t)=s(t−τq)=exp[j2π(fo(t−τq)+12μ(t−τq)2)]s_r(t) = s(t-\tau_q) = \exp[j2\pi(f_{o}(t-\tau_{q}) + \frac{1}{2}\mu(t-\tau_{q})^{2})]sr(t)=s(t−τq)=exp[j2π(fo(t−τq)+21μ(t−τq)2)] -
去调频 (De-chirping) ,将 sr(t)s_r(t)sr(t) 与 s∗(t)s^*(t)s∗(t) 混频:
sb(t)=sr(t)⋅s∗(t)s_b(t) = s_r(t) \cdot s^*(t)sb(t)=sr(t)⋅s∗(t)
sb(t)=exp[j2π(fo(t−τq)+12μ(t−τq)2)]⋅exp[−j2π(fot+12μt2)]s_b(t) = \exp[j2\pi(f_{o}(t-\tau_{q}) + \frac{1}{2}\mu(t-\tau_{q})^{2})] \cdot \exp[-j2\pi(f_{o}t + \frac{1}{2}\mu t^{2})]sb(t)=exp[j2π(fo(t−τq)+21μ(t−τq)2)]⋅exp[−j2π(fot+21μt2)] -
合并指数项 ,相位 Φb(t)\Phi_b(t)Φb(t) 为 2π2\pi2π 乘以内部各项之和:
Φb(t)=2π[(fot−foτq)+12μ(t2−2tτq+τq2)−(fot+12μt2)]\Phi_b(t) = 2\pi [ (f_{o}t - f_{o}\tau_q) + \frac{1}{2}\mu(t^2 - 2t\tau_q + \tau_q^2) - (f_o t + \frac{1}{2}\mu t^2) ]Φb(t)=2π[(fot−foτq)+21μ(t2−2tτq+τq2)−(fot+21μt2)] -
化简相位 :
- fotf_o tfot 与 −fot-f_o t−fot 抵消。
- 12μt2\frac{1}{2}\mu t^221μt2 与 −12μt2-\frac{1}{2}\mu t^2−21μt2 抵消。
- 剩余项为: Φb(t)=2π[−foτq−μtτq+12μτq2]\Phi_b(t) = 2\pi [ -f_{o}\tau_q - \mu t\tau_q + \frac{1}{2}\mu\tau_q^2 ]Φb(t)=2π[−foτq−μtτq+21μτq2]
- 这与论文中的公式 (3) 完全一致。
-
计算瞬时频率 fb(t)f_b(t)fb(t) :
瞬时频率是相位对时间的导数除以 2π2\pi2π。
fb(t)=12πdΦb(t)dt=12πddt[2π(−foτq−μtτq+12μτq2)]f_b(t) = \frac{1}{2\pi} \frac{d\Phi_b(t)}{dt} = \frac{1}{2\pi} \frac{d}{dt} [ 2\pi ( -f_{o}\tau_q - \mu t\tau_q + \frac{1}{2}\mu\tau_q^2 ) ]fb(t)=2π1dtdΦb(t)=2π1dtd[2π(−foτq−μtτq+21μτq2)] -
求导 :
- −foτq-f_o \tau_q−foτq 是常数,导数为 0。
- 12μτq2\frac{1}{2}\mu\tau_q^221μτq2 是常数,导数为 0。
- −μtτq-\mu t\tau_q−μtτq 对 ttt 的导数为 −μτq-\mu\tau_q−μτq。
fb(t)=−μτqf_b(t) = -\mu\tau_qfb(t)=−μτq
结论: 目标拍频信号的瞬时频率是一个常数 (与论文公式9一致),仅取决于调频斜率 μ\muμ 和延迟 τq\tau_qτq(即距离)。这就是“单音”的来源。
2. 干扰拍频信号 (Beat Signal) 及其瞬时频率
-
干扰信号 sint(t)s_{int}(t)sint(t) (来自干扰雷达,斜率 βm\beta_mβm,延迟 τm′\tau_m'τm′):
sint(t)=exp[j2π(fm(t−τm′)+12βm(t−τm′)2)]s_{int}(t) = \exp[j2\pi(f_{m}(t-\tau_{m}^{\prime}) + \frac{1}{2}\beta_{m}(t-\tau_{m}^{\prime})^{2})]sint(t)=exp[j2π(fm(t−τm′)+21βm(t−τm′)2)] -
受害雷达发射信号共轭 s∗(t)s^*(t)s∗(t) (斜率 μ\muμ):
s∗(t)=exp[−j2π(fot+12μt2)]s^*(t) = \exp[-j2\pi(f_{o}t + \frac{1}{2}\mu t^{2})]s∗(t)=exp[−j2π(fot+21μt2)] -
去调频,将 sint(t)s_{int}(t)sint(t) 与 s∗(t)s^*(t)s∗(t) 混频:
sb,int(t)=sint(t)⋅s∗(t)s_{b,int}(t) = s_{int}(t) \cdot s^*(t)sb,int(t)=sint(t)⋅s∗(t)
sb,int(t)=exp[j2π(fm(t−τm′)+12βm(t−τm′)2)]⋅exp[−j2π(fot+12μt2)]s_{b,int}(t) = \exp[j2\pi(f_{m}(t-\tau_{m}^{\prime}) + \frac{1}{2}\beta_{m}(t-\tau_{m}^{\prime})^{2})] \cdot \exp[-j2\pi(f_{o}t + \frac{1}{2}\mu t^{2})]sb,int(t)=exp[j2π(fm(t−τm′)+21βm(t−τm′)2)]⋅exp[−j2π(fot+21μt2)] -
合并指数项,相位 Φint(t)\Phi_{int}(t)Φint(t) 为 2π2\pi2π 乘以内部各项之和:
Φint(t)=2π[(fmt−fmτm′)+12βm(t2−2tτm′+(τm′)2)−(fot+12μt2)]\Phi_{int}(t) = 2\pi [ (f_{m}t - f_{m}\tau_m') + \frac{1}{2}\beta_{m}(t^2 - 2t\tau_m' + (\tau_m')^2) - (f_o t + \frac{1}{2}\mu t^2) ]Φint(t)=2π[(fmt−fmτm′)+21βm(t2−2tτm′+(τm′)2)−(fot+21μt2)] -
按 ttt 的幂次重新组合相位:
- t2t^2t2 项: (12βm−12μ)t2=12(βm−μ)t2(\frac{1}{2}\beta_m - \frac{1}{2}\mu)t^2 = \frac{1}{2}(\beta_m - \mu)t^2(21βm−21μ)t2=21(βm−μ)t2
- ttt 项: (fm−βmτm′−fo)t(f_m - \beta_m \tau_m' - f_o)t(fm−βmτm′−fo)t
- 常数项: (−fmτm′+12βm(τm′)2)(-f_m \tau_m' + \frac{1}{2}\beta_m (\tau_m')^2)(−fmτm′+21βm(τm′)2)
Φint(t)=2π[12(βm−μ)t2+(fm−fo−βmτm′)t+Constants]\Phi_{int}(t) = 2\pi [ \frac{1}{2}(\beta_{m}-\mu)t^{2} + (f_{m}-f_{o}-\beta_{m}\tau_{m}^{\prime})t + \text{Constants} ]Φint(t)=2π[21(βm−μ)t2+(fm−fo−βmτm′)t+Constants]
- 这与论文中的公式 (5), (122), (127) 的相位项完全一致。
-
计算瞬时频率 fb,int(t)f_{b,int}(t)fb,int(t):
fb,int(t)=12πdΦint(t)dt=12πddt[2π(12(βm−μ)t2+(fm−fo−βmτm′)t+…)]f_{b,int}(t) = \frac{1}{2\pi} \frac{d\Phi_{int}(t)}{dt} = \frac{1}{2\pi} \frac{d}{dt} [ 2\pi ( \frac{1}{2}(\beta_{m}-\mu)t^{2} + (f_{m}-f_{o}-\beta_{m}\tau_{m}^{\prime})t + \dots ) ]fb,int(t)=2π1dtdΦint(t)=2π1dtd[2π(21(βm−μ)t2+(fm−fo−βmτm′)t+…)] -
求导:
- 常数项导数为 0。
- ttt 项的导数为 (fm−fo−βmτm′)(f_{m}-f_{o}-\beta_{m}\tau_{m}^{\prime})(fm−fo−βmτm′)。
- t2t^2t2 项的导数为 (βm−μ)t(\beta_m - \mu)t(βm−μ)t。
fb,int(t)=(fm−fo−βmτm′)+(βm−μ)tf_{b,int}(t) = (f_{m}-f_{o}-\beta_{m}\tau_{m}^{\prime}) + (\beta_{m}-\mu)tfb,int(t)=(fm−fo−βmτm′)+(βm−μ)t
结论: 干扰拍频信号的瞬时频率是一个关于时间 ttt 的线性函数 (与论文公式8一致)。它的频率随时间变化,其变化的斜率(调频斜率)为 (βm−μ)(\beta_m - \mu)(βm−μ)。这就是“Chirp”的来源。
总结: 该推导证明了,在受害雷达的基带中,目标回波是恒定频率的单音,而干扰信号是时变频率的线性调频信号。VAFER算法正是利用VMD、FSST等非平稳信号处理工具来分离这两种具有根本不同时频特性的信号。