算法数学---差分数组(Difference Array)
差分数组是一种用于高效处理区间更新和单点查询的数据结构,其核心思想是通过记录数组元素间的差值,将原本需要O(n)时间的区间更新操作优化为O(1)。
差分数组
一、差分数组的定义
对于一个长度为n的原数组A(下标从0开始),其差分数组D的定义为:
- 当
i = 0时,D[0] = A[0]; - 当
i > 0时,D[i] = A[i] - A[i-1]。
即差分数组D的每个元素记录了原数组A中当前元素与前一个元素的差值。通过这一特性,原数组A可以由差分数组D的前缀和还原:
A[i]=∑k=0iD[k]A[i] = \sum_{k=0}^{i} D[k] A[i]=k=0∑iD[k]
例如,若原数组A = [1, 3, 6, 10, 15],则差分数组D的计算过程为:
D[0] = A[0] = 1D[1] = A[1] - A[0] = 3 - 1 = 2D[2] = A[2] - A[1] = 6 - 3 = 3D[3] = A[3] - A[2] = 10 - 6 = 4D[4] = A[4] - A[3] = 15 - 10 = 5
因此D = [1, 2, 3, 4, 5],而通过D的前缀和计算A:
A[0] = D[0] = 1A[1] = D[0] + D[1] = 1 + 2 = 3A[2] = 1 + 2 + 3 = 6(与原数组一致)。
二、核心操作
差分数组的优势体现在区间更新和原数组还原两个操作上
1. 初始化差分数组
根据定义,初始化差分数组需要遍历原数组,计算相邻元素的差值。时间复杂度为O(n)。
vector<int> initDiffArray(const vector<int>& A) {int n = A.size();vector<int> D(n);D[0] = A[0];for (int i = 1; i < n; ++i) {D[i] = A[i] - A[i-1];}return D;
}
2. 区间更新(核心优化点)
假设需要对原数组A的区间[L, R](闭区间)内所有元素加上一个值v(v可正可负,实现减法),直接操作原数组需要遍历[L, R],时间复杂度为O(R-L+1);而通过差分数组只需2步操作(在L出+v,在R+1处-v),时间复杂度为O(1)。
操作原理:
对A[L..R]加v,等价于:
D[L] += v:从L开始,所有元素的前缀和都会增加v(因为A[L]及之后的元素都包含D[L]);D[R+1] -= v(若R+1 < n):从R+1开始,前缀和增加的v被抵消(保证R之后的元素不受影响)。
例如,对A = [1, 3, 6, 10, 15]的[1, 3]区间加2:
- 原
D = [1, 2, 3, 4, 5] - 执行
D[1] += 2→D[1] = 4 - 执行
D[4] -= 2(因R=3,R+1=4 < 5)→D[4] = 3 - 新
D = [1, 4, 3, 4, 3] - 还原
A:A[0]=1,A[1]=1+4=5,A[2]=1+4+3=8,A[3]=1+4+3+4=12,A[4]=1+4+3+4+3=15。可见[1,3]元素均加了2(3→5,6→8,10→12),符合预期。
代码实现:
void rangeUpdate(vector<int>& D, int L, int R, int v) {int n = D.size();if (L < 0 || R >= n || L > R) return; // 处理无效区间D[L] += v;if (R + 1 < n) { // 避免越界D[R + 1] -= v;}
}
3. 还原原数组(单点/全量查询)
通过差分数组的前缀和可还原原数组,若只需查询A[i],计算D[0..i]的前缀和即可;若需全量查询,遍历计算前缀和数组即可。时间复杂度为O(n)(全量)或O(i)(单点)。
vector<int> restoreArray(const vector<int>& D) {int n = D.size();vector<int> A(n);A[0] = D[0];for (int i = 1; i < n; ++i) {A[i] = A[i-1] + D[i]; // 前缀和累加}return A;
}
三、差分数组的性质
-
与原数组的互逆性:差分数组是原数组的“差”,原数组是差分数组的“前缀和”,二者互为逆操作。
-
区间更新的高效性:将区间更新从
O(n)优化为O(1),这是差分数组的核心价值。尤其当存在大量区间更新(如10^5次)时,效率提升极为显著(从O(10^10)降至O(10^5))。 -
适合离线场景:差分数组的优势在于“先积累所有更新,最后一次性还原”。若需要频繁在更新过程中查询中间结果(如边更新边查
A[i]),则每次查询需O(n)时间,效率较低(此时更适合线段树或树状数组)。 -
边界敏感性:当
R = n-1(区间包含最后一个元素)时,R+1 = n已超出数组范围,此时无需执行D[R+1] -= v(因前缀和计算不会涉及D[n]),代码需特殊处理。 -
空间复杂度:与原数组同规模,为
O(n),无额外空间开销。
四、适用场景与对比
差分数组的适用场景需满足:
- 以区间更新(如
[L, R]加/减v)为主; - 查询为单点查询或全量查询,且查询频率远低于更新频率;
- 数据规模较大(如
n > 10^4),需要优化时间复杂度。
与其他数据结构的对比:
| 数据结构 | 区间更新 | 单点查询 | 区间查询 | 适用场景 |
|---|---|---|---|---|
| 差分数组 | O(1) | O(n) | O(n) | 大量区间更新+最后全量查询 |
| 前缀和数组 | O(n) | O(1) | O(1) | 大量单点更新+大量区间查询 |
| 线段树 | O(logn) | O(logn) | O(logn) | 动态更新+频繁中间查询 |
完整示例代码
以下代码演示差分数组的初始化、多次区间更新及原数组还原过程:
#include <iostream>
#include <vector>
using namespace std;// 初始化差分数组
vector<int> initDiffArray(const vector<int>& A) {int n = A.size();vector<int> D(n);D[0] = A[0];for (int i = 1; i < n; ++i) {D[i] = A[i] - A[i-1];}return D;
}// 区间更新:A[L..R] += v
void rangeUpdate(vector<int>& D, int L, int R, int v) {int n = D.size();if (L < 0 || R >= n || L > R) {cerr << "无效区间!" << endl;return;}D[L] += v;if (R + 1 < n) {D[R + 1] -= v;}
}// 从差分数组还原原数组
vector<int> restoreArray(const vector<int>& D) {int n = D.size();vector<int> A(n);A[0] = D[0];for (int i = 1; i < n; ++i) {A[i] = A[i-1] + D[i];}return A;
}int main() {// 原数组vector<int> A = {10, 20, 30, 40, 50};cout << "初始数组: ";for (int num : A) cout << num << " ";cout << endl;// 初始化差分数组vector<int> D = initDiffArray(A);cout << "初始差分数组: ";for (int num : D) cout << num << " ";cout << endl;// 执行多次区间更新rangeUpdate(D, 1, 3, 5); // [1,3]加5rangeUpdate(D, 0, 2, -3); // [0,2]减3rangeUpdate(D, 4, 4, 10); // [4,4]加10(单点更新)cout << "更新后差分数组: ";for (int num : D) cout << num << " ";cout << endl;// 还原原数组vector<int> newA = restoreArray(D);cout << "更新后数组: ";for (int num : newA) cout << num << " ";cout << endl;return 0;
}
输出结果:
初始数组: 10 20 30 40 50
初始差分数组: 10 10 10 10 10
更新后差分数组: 7 12 12 5 -5
更新后数组: 7 19 31 36 60
验证:
- 初始
A = [10,20,30,40,50] - 第一次更新
[1,3] +5:通过差分数组操作后,对应原数组中索引1-3的元素会增加5; - 第二次更新
[0,2] -3:索引0-2的元素会减少3; - 第三次更新
[4,4] +10:索引4的元素增加10; - 最终通过差分数组前缀和还原的
[7,19,31,36,60]符合所有更新逻辑,体现了差分数组的准确性。
差分数组是处理区间更新的“利器”,其核心在于通过记录差值将高频区间操作优化为常数时间。掌握差分数组需理解“差与前缀和的互逆关系”,并明确其适用场景(离线、大量更新、少查询)。在实际应用中,结合二维扩展和边界处理,可有效解决矩阵更新、区间统计等问题。
二维差分数组
二维差分分数组是一维差分分数组在二维场景的扩展,专门用于高效处理矩形区域更新(如对矩阵中某个矩形内的所有元素加/减一个值)和全量还原查询。其核心思想是通过记录二维前缀和的差值,将原本需要O(ab)时间的矩形更新(a、b为矩形的行数和列数)优化为O(1),在图像处理、矩阵统计等场景中应用广泛。
一、二维差分分数组的定义
对于一个n行m列的二维原数组A(下标从0开始),其二维差分分数组D(同样为n行m列)的定义基于二维前缀和的逆运算:
原数组A是差分分数组D的二维前缀和,即A[i][j]等于D中从(0,0)到(i,j)的所有元素之和。用公式表示为:
A[i][j]=∑x=0i∑y=0jD[x][y]A[i][j] = \sum_{x=0}^i \sum_{y=0}^j D[x][y] A[i][j]=x=0∑iy=0∑jD[x][y]
这一关系是二维差分分数组的核心——与一维类似,D记录了A的“差值信息”,而A可通过D的二维前缀和还原。
二、二维差分分数组的构造(从A到D)
构造二维差分分数组的本质是求解“如何从原数组A推导出D”,需要基于二维前缀和的逆运算推导公式。
推导过程:
已知A是D的二维前缀和,即:
- 当
i=0且j=0时:A[0][0] = D[0][0](因为只有D[0][0]一个元素)。 - 当
i=0且j>0时(第一行):A[0][j] = A[0][j-1] + D[0][j](仅需累加当前行的前序元素),因此D[0][j] = A[0][j] - A[0][j-1]。 - 当
j=0且i>0时(第一列):A[i][0] = A[i-1][0] + D[i][0](仅需累加当前列的前序元素),因此D[i][0] = A[i][0] - A[i-1][0]。 - 当
i>0且j>0时(非边界元素):A[i][j]的二维前缀和需包含A[i-1][j](上方区域)、A[i][j-1](左方区域),但A[i-1][j-1]被重复累加,因此需要减去。即:
A[i][j]=A[i−1][j]+A[i][j−1]−A[i−1][j−1]+D[i][j]A[i][j] = A[i-1][j] + A[i][j-1] - A[i-1][j-1] + D[i][j] A[i][j]=A[i−1][j]+A[i][j−1]−A[i−1][j−1]+D[i][j]
整理得:
D[i][j]=A[i][j]−A[i−1][j]−A[i][j−1]+A[i−1][j−1]D[i][j] = A[i][j] - A[i-1][j] - A[i][j-1] + A[i-1][j-1] D[i][j]=A[i][j]−A[i−1][j]−A[i][j−1]+A[i−1][j−1]
构造公式总结:
D[i][j]={A[0][0]if i=0and j=0,A[0][j]−A[0][j−1]if i=0and j>0,A[i][0]−A[i−1][0]if j=0and i>0,A[i][j]−A[i−1][j]−A[i][j−1]+A[i−1][j−1]if i>0and j>0.D[i][j] = \begin{cases} A[0][0] & \text{if } i=0 \text{ and } j=0, \\ A[0][j] - A[0][j-1] & \text{if } i=0 \text{ and } j>0, \\ A[i][0] - A[i-1][0] & \text{if } j=0 \text{ and } i>0, \\ A[i][j] - A[i-1][j] - A[i][j-1] + A[i-1][j-1] & \text{if } i>0 \text{ and } j>0. \end{cases} D[i][j]=⎩⎨⎧A[0][0]A[0][j]−A[0][j−1]A[i][0]−A[i−1][0]A[i][j]−A[i−1][j]−A[i][j−1]+A[i−1][j−1]if i=0 and j=0,if i=0 and j>0,if j=0 and i>0,if i>0 and j>0.
示例:
设原数组A为3行3列矩阵:
A = [[1, 2, 3],[4, 5, 6],[7, 8, 9]
]
按公式构造D:
D[0][0] = A[0][0] = 1D[0][1] = A[0][1] - A[0][0] = 2 - 1 = 1D[0][2] = A[0][2] - A[0][1] = 3 - 2 = 1D[1][0] = A[1][0] - A[0][0] = 4 - 1 = 3D[1][1] = A[1][1] - A[0][1] - A[1][0] + A[0][0] = 5 - 2 - 4 + 1 = 0D[1][2] = A[1][2] - A[0][2] - A[1][1] + A[0][1] = 6 - 3 - 5 + 2 = 0D[2][0] = A[2][0] - A[1][0] = 7 - 4 = 3D[2][1] = A[2][1] - A[1][1] - A[2][0] + A[1][0] = 8 - 5 - 7 + 4 = 0D[2][2] = A[2][2] - A[1][2] - A[2][1] + A[1][1] = 9 - 6 - 8 + 5 = 0
因此,差分分数组D为:
D = [[1, 1, 1],[3, 0, 0],[3, 0, 0]
]
三、二维差分分数组的还原(从D到A)
还原过程即计算D的二维前缀和,步骤为:先对D的每一行计算行前缀和,再对结果计算列前缀和(或先列后行,结果一致)。
具体步骤:
- 行前缀和:对
D的每一行,从左到右累加,得到中间矩阵row_sum,其中row_sum[i][j] = row_sum[i][j-1] + D[i][j](j=0时row_sum[i][0] = D[i][0])。 - 列前缀和:对
row_sum的每一列,从上到下累加,得到原数组A,其中A[i][j] = A[i-1][j] + row_sum[i][j](i=0时A[0][j] = row_sum[0][j])。
示例验证(还原上述D为A):
-
计算
D的行前缀和row_sum:- 第0行:
[1, 1+1=2, 2+1=3] - 第1行:
[3, 3+0=3, 3+0=3] - 第2行:
[3, 3+0=3, 3+0=3]
- 第0行:
-
计算
row_sum的列前缀和A:- 第0列:
[1, 1+3=4, 4+3=7] - 第1列:
[2, 2+3=5, 5+3=8] - 第2列:
[3, 3+3=6, 6+3=9]
结果与原数组
A完全一致,验证了还原逻辑的正确性。 - 第0列:
四、矩形区域更新(核心操作)
二维差分分数组的核心价值是O(1)时间完成矩形区域更新。假设需要对原数组A中左上角(x1,y1)、右下角(x2,y2)的矩形区域内所有元素加v(v可正可负),通过差分分数组D只需4步操作。
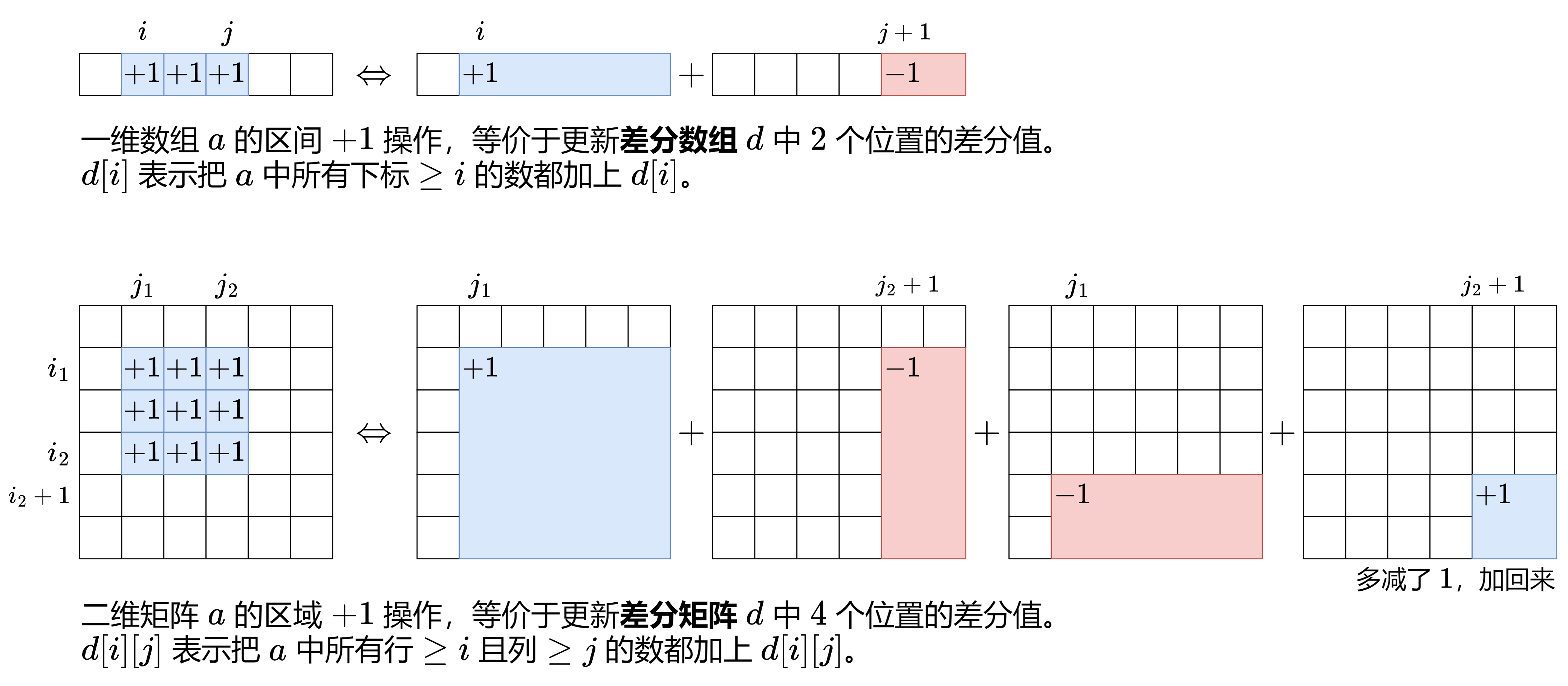
图片是引用的灵神题解的图片
更新原理:
矩形更新的本质是让A中目标区域的所有元素在还原时都增加v。由于A是D的二维前缀和,需通过D的4个关键点控制前缀和的累加范围:
D[x1][y1] += v:从(x1,y1)开始,所有右下方的元素(包含目标矩形)的前缀和都会增加v。D[x1][y2+1] -= v:从(x1,y2+1)开始,抵消右侧区域的v(保证目标矩形右侧不受影响)。D[x2+1][y1] -= v:从(x2+1,y1)开始,抵消下方区域的v(保证目标矩形下方不受影响)。D[x2+1][y2+1] += v:由于(x2+1,y2+1)被上述两次抵消重复减去了v,此处需加回v以恢复平衡。
边界处理:
若x2+1 >= n(超出行数)或y2+1 >= m(超出列数),则无需处理对应位置(因前缀和计算不会涉及这些超出范围的元素)。
示例:
对上述A中(1,1)到(2,2)的矩形区域(元素5,6,8,9)加2,步骤如下:
- 原
D为:[[1, 1, 1],[3, 0, 0],[3, 0, 0] ] - 矩形区域
x1=1,y1=1,x2=2,y2=2,执行更新:D[1][1] += 2→0+2=2y2+1=3(超出列数m=3),跳过D[x1][y2+1] -=vx2+1=3(超出行数n=3),跳过D[x2+1][y1] -=v- 同上,跳过
D[x2+1][y2+1] +=v
更新后D为:
[[1, 1, 1],[3, 2, 0],[3, 0, 0] ] - 还原
A(计算二维前缀和):- 行前缀和
row_sum:
第0行:[1,2,3];第1行:[3,3+2=5,5+0=5];第2行:[3,3+0=3,3+0=3] - 列前缀和
A:
第0列:[1,4,7];第1列:[2,2+5=7,7+3=10];第2列:[3,3+5=8,8+3=11]
得到更新后的A:
可见[[1, 2, 3],[4, 7, 8],[7, 10, 11] ](1,1)-(2,2)区域的元素5→7、6→8、8→10、9→11,均增加了2,符合预期。 - 行前缀和
五、代码实现
以下是二维差分分数组的构造、矩形更新、还原的完整C++代码:
#include <iostream>
#include <vector>
using namespace std;// 构造二维差分分数组(从A到D)
vector<vector<int>> init2DDiffArray(const vector<vector<int>>& A) {int n = A.size();if (n == 0) return {};int m = A[0].size();vector<vector<int>> D(n, vector<int>(m, 0));// 填充D[0][0]D[0][0] = A[0][0];// 填充第一行(i=0, j>0)for (int j = 1; j < m; ++j) {D[0][j] = A[0][j] - A[0][j-1];}// 填充第一列(j=0, i>0)for (int i = 1; i < n; ++i) {D[i][0] = A[i][0] - A[i-1][0];}// 填充非边界元素(i>0, j>0)for (int i = 1; i < n; ++i) {for (int j = 1; j < m; ++j) {D[i][j] = A[i][j] - A[i-1][j] - A[i][j-1] + A[i-1][j-1];}}return D;
}// 矩形区域更新:A[x1..x2][y1..y2] += v
void rectUpdate(vector<vector<int>>& D, int x1, int y1, int x2, int y2, int v) {int n = D.size();if (n == 0) return;int m = D[0].size();// 检查区间有效性if (x1 < 0 || x2 >= n || y1 < 0 || y2 >= m || x1 > x2 || y1 > y2) {cerr << "无效矩形区域!" << endl;return;}// 核心更新操作D[x1][y1] += v;if (y2 + 1 < m) {D[x1][y2 + 1] -= v;}if (x2 + 1 < n) {D[x2 + 1][y1] -= v;}if (x2 + 1 < n && y2 + 1 < m) {D[x2 + 1][y2 + 1] += v;}
}// 从二维差分分数组还原原数组(从D到A)
vector<vector<int>> restore2DArray(const vector<vector<int>>& D) {int n = D.size();if (n == 0) return {};int m = D[0].size();vector<vector<int>> A(n, vector<int>(m, 0));// 第一步:计算行前缀和vector<vector<int>> row_sum = D; // 复制D作为初始行前缀和for (int i = 0; i < n; ++i) {for (int j = 1; j < m; ++j) {row_sum[i][j] += row_sum[i][j-1];}}// 第二步:计算列前缀和(得到A)A[0] = row_sum[0]; // 第一行直接复制for (int i = 1; i < n; ++i) {for (int j = 0; j < m; ++j) {A[i][j] = A[i-1][j] + row_sum[i][j];}}return A;
}// 打印矩阵
void printMatrix(const vector<vector<int>>& mat, const string& name) {cout << name << ":\n";for (const auto& row : mat) {for (int num : row) {cout << num << "\t";}cout << "\n";}cout << endl;
}int main() {// 原数组A(3x3)vector<vector<int>> A = {{1, 2, 3},{4, 5, 6},{7, 8, 9}};printMatrix(A, "初始原数组A");// 构造二维差分分数组Dvector<vector<int>> D = init2DDiffArray(A);printMatrix(D, "初始差分分数组D");// 执行矩形更新:对(1,1)-(2,2)区域加2rectUpdate(D, 1, 1, 2, 2, 2);printMatrix(D, "更新后差分分数组D");// 还原原数组vector<vector<int>> newA = restore2DArray(D);printMatrix(newA, "更新后原数组A");return 0;
}
初始原数组A:
1 2 3
4 5 6
7 8 9 初始差分分数组D:
1 1 1
3 0 0
3 0 0 更新后差分分数组D:
1 1 1
3 2 0
3 0 0 更新后原数组A:
1 2 3
4 7 8
7 10 11
二维差分分数组通过记录二维前缀和的差值,将矩形区域更新优化为O(1)操作,其核心是理解“D的四个点更新如何控制A的前缀和范围”。构造D需基于原数组的边界和非边界元素分别计算,还原A则通过两次前缀和(行→列或列→行)实现。
与一维差分分数组类似,二维差分分数组适合离线场景(先积累所有更新,最后一次性还原),若需频繁中间查询,建议使用二维线段树等数据结构。