基于电鱼 RK3588 AI 工控机的智慧工地视频智能分析方案——减少布线复杂度与网络延迟,实现高效边缘智能
一、行业痛点
当前智慧工地视频监控系统普遍存在以下问题:
- 📷 摄像头数量多、布线复杂,安装成本高;
- 🌐 视频数据直接上传云端,带宽占用大、延迟高;
- 🧠 缺乏本地智能分析能力,只能依赖云端算法;
- ⚙️ 系统维护困难,现场设备多、更新不便。
✅ 解决方向:
在工地本地部署高性能ARM工控机,实现多路视频采集 + 边缘AI识别 + 智能上报,
减少布线与流量,提升分析实时性与运维效率。
二、核心硬件平台
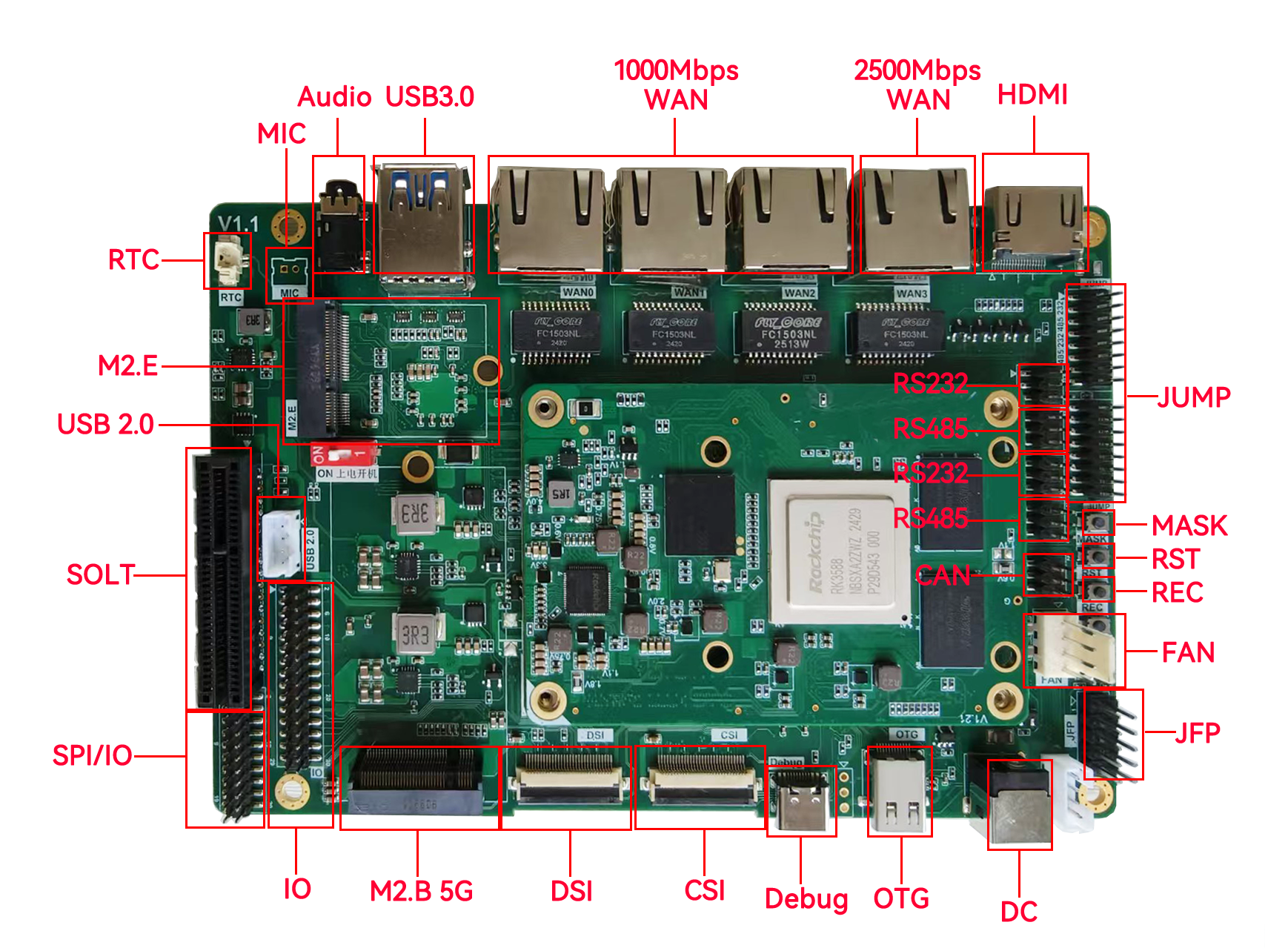
项目 | 电鱼 EFISH-RK3588 AI工控机 |
CPU | 8核 Cortex-A76 + A55 |
NPU性能 | 6 TOPS AI算力 |
视频接口 | HDMI / MIPI / USB / Ethernet |
存储 | eMMC + SSD 扩展 |
操作系统 | Linux 5.10 / Ubuntu 20.04 |
特点 | 多路视频输入 / 高算力AI推理 / 宽温运行 |
⚙️ 工控机支持同时处理多路1080P视频流,
并在本地执行AI推理任务(如安全帽检测、人员统计、危险区域入侵识别)。
三、系统功能模块
模块 | 功能 | 技术实现 |
视频采集模块 | 同时接入多路摄像头 | HDMI / USB / MIPI接口 |
AI识别模块 | 实时检测安全帽、反光服、人员入侵等 | TensorRT + RKNN推理引擎 |
本地缓存模块 | 网络异常时本地存储数据 | eMMC + 循环写入机制 |
智能上报模块 | 仅上传AI识别结果 | MQTT / HTTP轻量传输 |
远程管理模块 | 支持OTA更新与日志回传 | RESTful API接口 |
四、AI识别与带宽优化逻辑
frame = get_video_frame()result = ai_model.detect(frame)if result.contains("no_helmet") or result.contains("intrusion"):upload_event(result, priority="high")else:# 仅记录,不上传原视频save_local(frame)💡 工控机仅上传“检测结果”和“事件截图”,
通过本地推理减少视频上行流量90%以上。
五、系统优势
✅ 本地智能分析:AI工控机在现场实时识别,无需云端计算;
✅ 降低带宽占用:只上传关键事件结果,节省网络资源;
✅ 布线更简洁:多接口支持多路摄像头直连;
✅ 低延迟反应:AI识别在毫秒级完成,立即报警;
✅ 运维成本低:支持远程管理与OTA更新;
✅ 工业稳定性:宽温运行(-20℃~75℃)、7×24小时稳定工作。
六、实施步骤
[步骤1] 在工地关键区域部署摄像头
[步骤2] 安装电鱼RK3588工控机作为边缘节点
[步骤3] 部署AI识别模型(安全帽/人脸/入侵)
[步骤4] 配置视频流与事件上传策略
[步骤5] 接入监控中心进行数据汇总与告警
整个系统支持模块化部署,
一个工控机即可覆盖多个监控点,实现分布式智能监控。
七、应用场景
- 👷 工地出入口安全帽检测
- 🧱 高空作业区人员入侵检测
- 🚧 塔吊运行区域AI分析与预警
- 🚪 夜间入侵识别与智能照明联动
- 🧩 施工现场行为识别与事件统计