基于中值滤波和高斯平滑的三维点云数据滤波matlab仿真
目录
1.前言
2.算法运行效果图预览
3.算法运行软件版本
4.部分核心程序
5.算法理论概述
5.1 三维点云数据的噪声类型
5.2 三维点云中值滤波的实现步骤
6.参考文献
7.算法完整程序工程
1.前言
三维点云滤波是点云预处理的核心环节,其目的是消除采集过程中因设备噪声、环境干扰等产生的异常点(离群点)与冗余信息,为后续配准、分割、重建等任务提供高质量数据。中值滤波与高斯平滑是两种经典的点云滤波算法,前者擅长抑制脉冲噪声,后者侧重实现数据的平滑过渡。
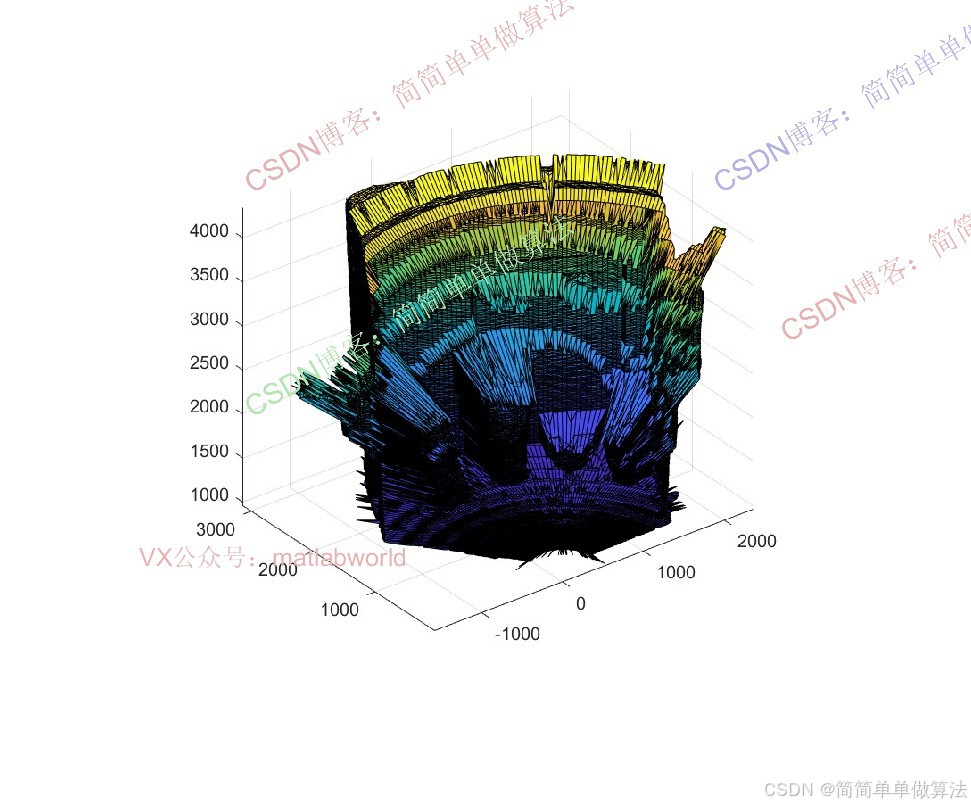
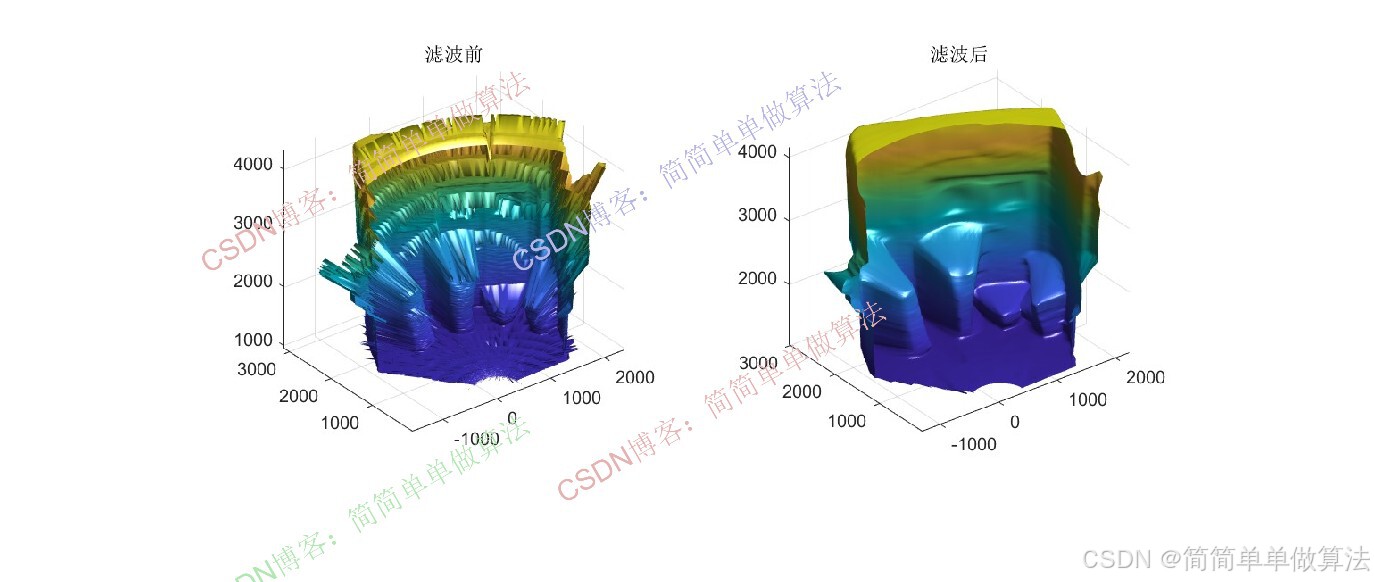
2.算法运行效果图预览
(完整程序运行后无水印)
3.算法运行软件版本
Matlab2024b(推荐)或者matlab2022a
4.部分核心程序
(完整版代码包含中文注释和操作步骤视频)
................................................................
x1 = smooth(x1,2,'moving');
y1 = smooth(y1,2,'moving');
z1 = smooth(z1,2,'moving');x0 = reshape(x1,[Im,In]);
y0 = reshape(y1,[Im,In]);
z0 = reshape(z1,[Im,In]);
................................................
%%
%步骤三:数据中,中空的区域的修补,使得曲面平滑
[Im,In] = size(x0);
%矩阵滤波及中值滤波
x0 = func_bu(x0,Im,In);
y0 = func_bu(y0,Im,In);
z0 = func_bu(z0,Im,In);
for i = 1:Intmpx2(i) = length(find(x0(:,i) == 0));
end%%
%步骤四:高斯平滑
[Im,In] = size(x0);
x0 = func_smooth(x0,Im,In);
y0 = func_smooth(y0,Im,In);
z0 = func_smooth(z0,Im,In);figure(1);
subplot(122);
surf(x0,y0,z0);
axis equal
camlight right;
lighting phong;
shading interp
title('滤波后');
25_010m5.算法理论概述
5.1 三维点云数据的噪声类型
三维点云由大量离散的三维坐标点(通常包含X、Y、Z坐标,部分含法向量、颜色等属性)组成,其噪声主要分为两类:
脉冲噪声(离群点):由激光雷达等设备的偶然误差、环境中遮挡物反射等导致,表现为与周围点云距离极远的孤立点或小簇点,对后续几何特征提取(如法向量计算)影响显著。
高斯噪声(随机噪声):由设备传感器的电子噪声、数据传输误差等导致,表现为点云在真实表面附近的随机波动,使点云整体呈现 “粗糙” 状态,影响重建模型的平滑度。
5.2 三维点云中值滤波的实现步骤
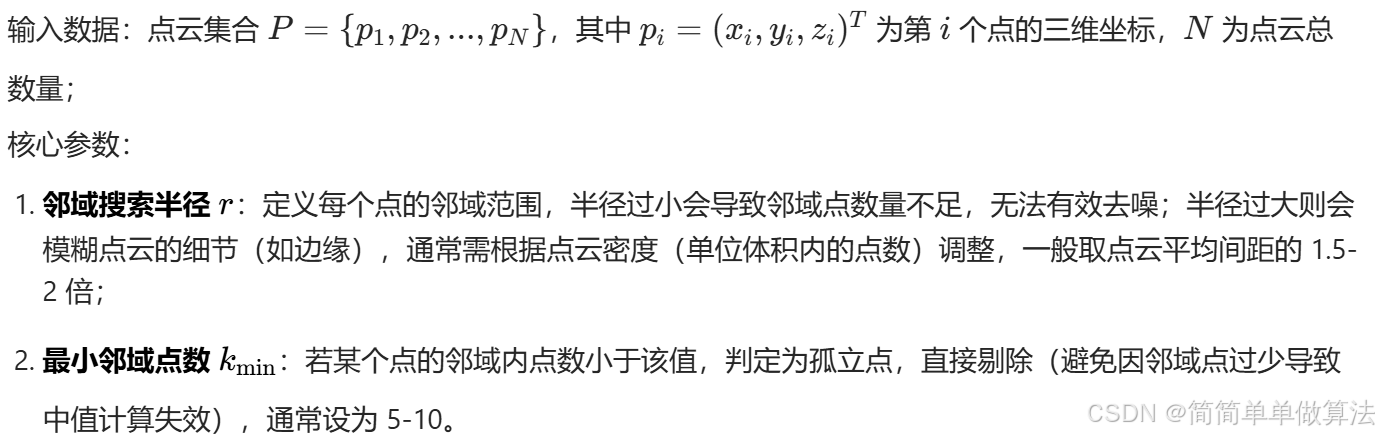
首先加载待滤波的点云数据,并设置滤波的关键参数,参数的选择直接影响滤波效果与效率:
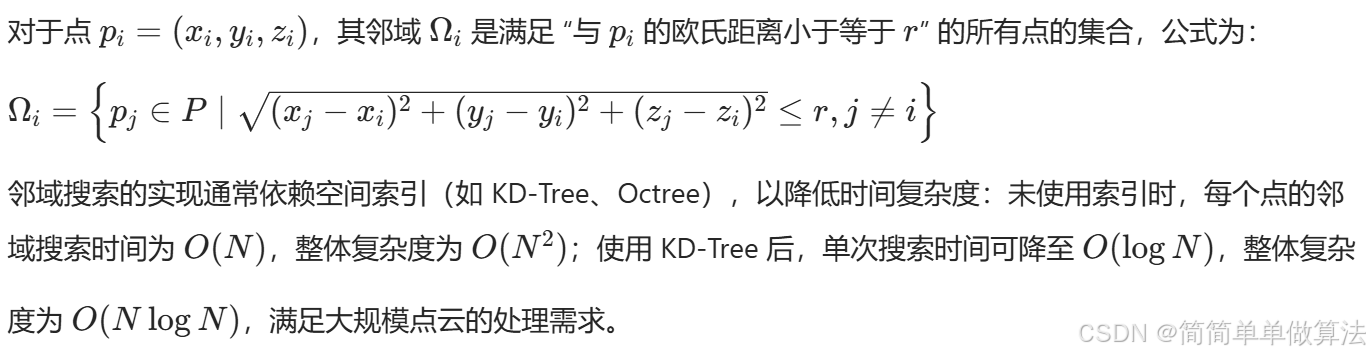
针对点云中的每个点pi,采用 “球形邻域搜索”(三维空间中最常用的邻域形式)筛选出其邻域内的所有点。球形邻域的数学定义如下:
高斯平滑(Gaussian Smoothing)又称高斯滤波,是一种经典的线性滤波算法,其核心思想是通过“加权平均”实现数据平滑 —— 对每个点的邻域点赋予不同的权重(距离越近权重越大),再通过加权平均更新原始点的坐标。该算法对高斯噪声的抑制效果极佳,是点云平滑处理的主流选择。
在实际点云预处理中,单一算法往往无法满足复杂噪声场景(如同时存在脉冲噪声与高斯噪声),因此常采用“中值滤波 + 高斯平滑”的联合策略,流程如下:
第一步:中值滤波去离群点:先使用中值滤波剔除点云中的脉冲噪声(离群点),避免其对后续高斯平滑产生干扰;
第二步:高斯平滑抑高斯噪声:对中值滤波后的点云进行高斯平滑,抑制残留的高斯噪声,实现点云的平滑处理;
6.参考文献
[1]隋立春,张熠斌,柳艳,等.基于改进的数学形态学算法的LiDAR点云数据滤波[J].测绘学报, 2010(4):7.DOI:CNKI:SUN:CHXB.0.2010-04-012.
[1]李鹏程,王慧,刘志青,等.一种基于扫描线的数学形态学LiDAR点云滤波方法[J].测绘科学技术学报, 2011, 28(4):5.DOI:10.3969/j.issn.1673-6338.2011.04.010.
7.算法完整程序工程
OOOOO
OOO
O
关注后输入自动回复码:0008