[nanoGPT] 编排训练 | `get_batch` | AdamW | `get_lr` | 分布式训练(DDP)
第四章:训练流程编排
欢迎回来
在第三章:配置系统中,我们学习了如何精确调整nanoGPT模型的各项参数,就像操作控制面板上的旋钮和开关。现在数据已就绪,模型架构已定义,训练设置已配置,是时候让一切运转起来了!我们需要一个核心系统来协调所有组件,让模型真正开始学习。
想象你是一位交响乐团的指挥。所有乐器(数据、模型、优化器)都已就位,乐谱(配置参数)也已备好。
但如果没有指挥来协调每件乐器的演奏时机、音量和节奏,这些只是零散的部件。训练流程编排正是nanoGPT的指挥系统。
本章聚焦于train.py——学习过程的核心。
这个中央控制系统管理着GPT模型的整个学习历程,其核心任务是迭代执行:输入数据→模型预测→从错误中学习→更新内部参数→记录进度,直到模型成为熟练的语言大师。
训练流程的核心职责
核心目标很简单:用预处理数据训练GPT模型预测下一个标记,通过大量迭代逐步提升预测能力。
为实现这一目标,训练循环需要:
- 获取数据:加载批量的标记ID(预处理好的"食材")
- 前向传播:将标记输入GPT模型获取预测
- 计算损失:量化预测误差
- 反向传播:分析模型各部分对错误的贡献
- 优化权重:调整内部参数以改进预测
- 学习管理:控制学习节奏、记录日志、保存模型
- 协同工作:处理多GPU分布式训练等高级场景
让我们深入探索nanoGPT如何编排这些步骤,将初始模型培养成语言生成大师。
训练循环实战(train.py)
训练主脚本是train.py(在配置系统中已提及)。运行该脚本即启动完整训练流程。
例如训练字符级莎士比亚GPT:
python train.py config/train_shakespeare_char.py
该命令让train.py加载config/train_shakespeare_char.py中的设置(数据集、模型规模、学习率等),开始训练历程。脚本会在终端打印训练进度。
核心组件
train.py通过协调多个关键模块实现模型学习。
1. 数据供给器(get_batch)
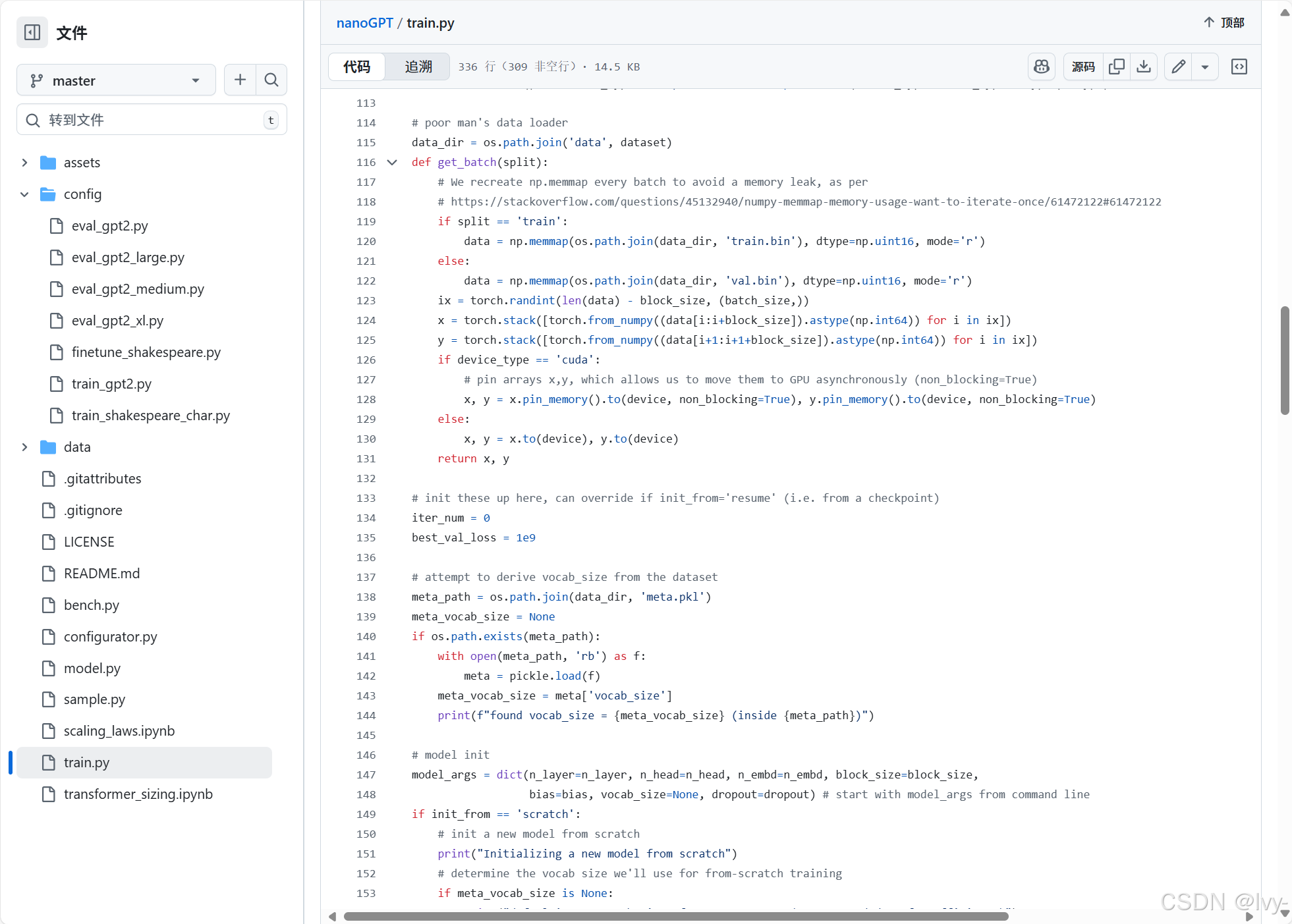
如同厨师需要持续供应食材,模型需要源源不断的标记数据批次。get_batch函数负责从预处理好的二进制文件(train.bin, val.bin,见第一章)中高效提取数据:
# 摘自train.py(简化版)
def get_batch(split):# 从.bin文件高效加载数据data = np.memmap(os.path.join(data_dir, f'{split}.bin'), dtype=np.uint16, mode='r')# 随机选择序列起始位置ix = torch.randint(len(data) - block_size, (batch_size,))# 提取输入(x)和目标(y)序列x = torch.stack([torch.from_numpy((data[i:i+block_size]).astype(np.int64)) for i in ix])y = torch.stack([torch.from_numpy((data[i+1:i+1+block_size]).astype(np.int64)) for i in ix])# 数据送至指定设备(GPU/CPU)x, y = x.to(device), y.to(device)return x, y
np.memmap:直接从磁盘按需加载数据,适合超大数据集- 随机索引:确保每批数据多样性
- 输入/目标:若输入x是
[1,5,2],目标y则为[5,2,7](7是2的后继标记) - 设备转移:自动适配GPU/CPU环境
该函数在训练过程中被反复调用,持续提供新数据。
2. 优化器(model.configure_optimizers)
优化器是模型的"学习引擎"。在计算预测损失后,优化器利用误差信息调整模型参数。nanoGPT采用深度学习常用的AdamW优化器:
# 摘自train.py
optimizer = model.configure_optimizers(weight_decay, learning_rate, (beta1, beta2), device_type)
model.configure_optimizers(定义于model.py)配置优化器参数:
weight_decay:防止模型过拟合的正则化技术learning_rate:参数调整步长beta1/beta2:AdamW优化器的内部调节参数
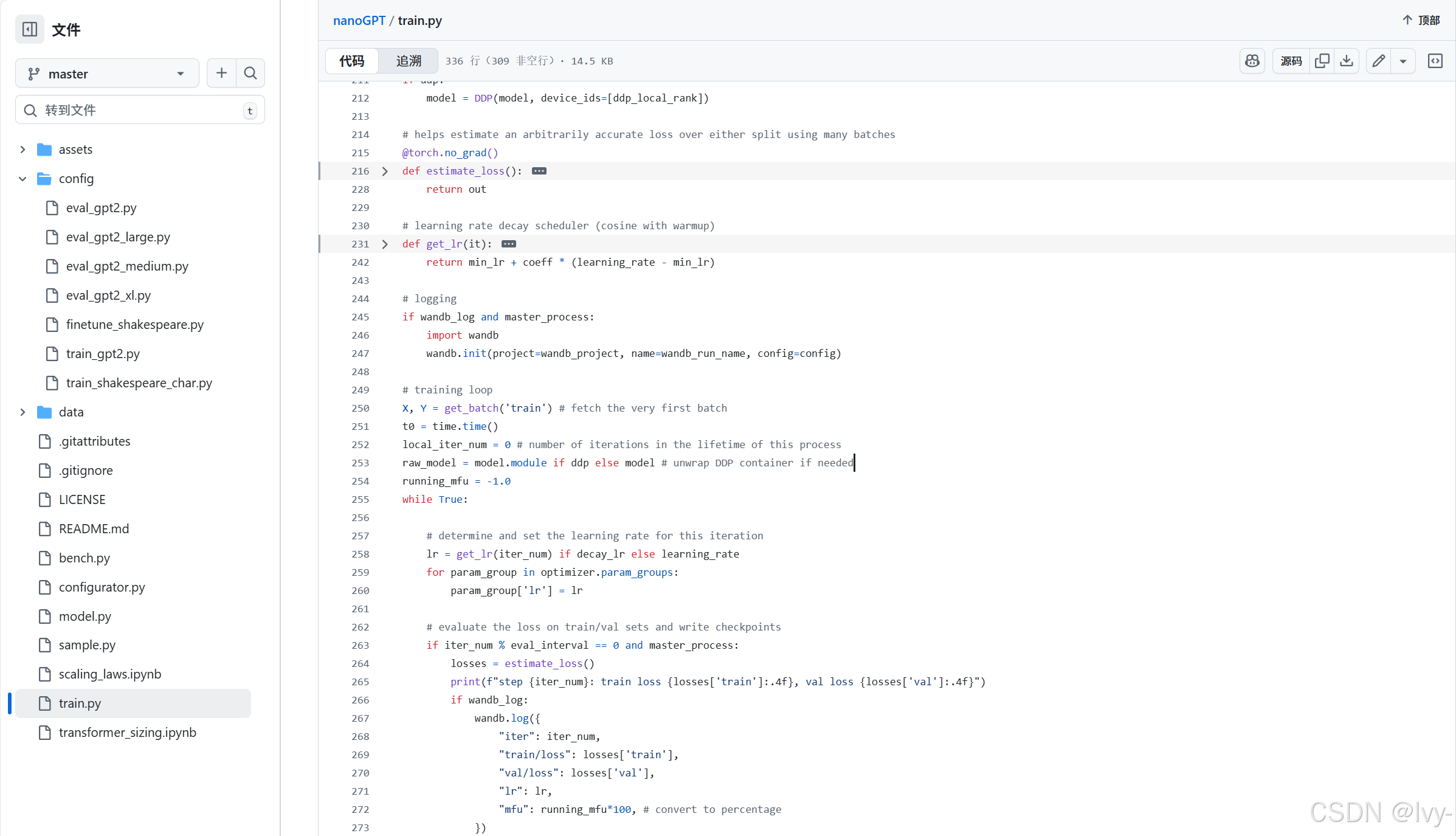
3. 学习率调度器(get_lr)
学习率(参数调整幅度)至关重要。
初始高学习率可加速早期学习,但后期可能错过最优解。常见策略是初始较低→逐步升温→缓慢衰减,即学习率调度:
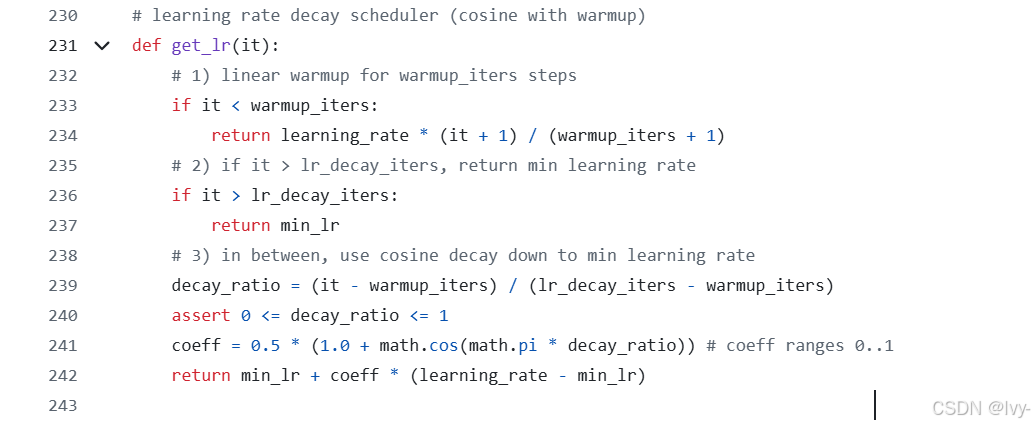
# 摘自train.py(简化版)
def get_lr(it):# 1) 线性升温阶段if it < warmup_iters:return learning_rate * (it + 1) / (warmup_iters + 1)# 2) 衰减阶段结束后保持最小学习率if it > lr_decay_iters:return min_lr# 3) 余弦衰减至最小学习率decay_ratio = (it - warmup_iters) / (lr_decay_iters - warmup_iters)coeff = 0.5 * (1.0 + math.cos(math.pi * decay_ratio))return min_lr + coeff * (learning_rate - min_lr)# 训练循环中应用:
lr = get_lr(iter_num) if decay_lr else learning_rate
for param_group in optimizer.param_groups:param_group['lr'] = lr
get_lr根据当前训练步数iter_num动态计算学习率,确保训练过程平稳高效。
4. 性能评估(estimate_loss)
为监控模型真实学习效果(而非死记硬背),需定期在训练集和验证集上评估表现:
# 摘自train.py(简化版)
@torch.no_grad() # 评估时不计算梯度(节省资源)
def estimate_loss():out = {}model.eval() # 切换为评估模式for split in ['train', 'val']:losses = torch.zeros(eval_iters)for k in range(eval_iters):X, Y = get_batch(split)with ctx: # 混合精度上下文logits, loss = model(X, Y)losses[k] = loss.item()out[split] = losses.mean()model.train() # 恢复训练模式return out
@torch.no_grad:禁用梯度计算,提升评估效率- 双模式切换:某些层(如Dropout)在训练/评估时行为不同
- 多批次平均:通过
eval_iters次评估取平均,确保结果稳定
5. 混合精度训练(torch.amp.autocast, GradScaler)
现代GPU使用float16/bfloat16低精度计算可提升速度并降低显存占用,但可能导致数值不稳定。PyTorch提供全套解决方案:
# 摘自train.py(简化版)
device_type = 'cuda' if 'cuda' in device else 'cpu'
ptdtype = {'float32': torch.float32, 'bfloat16': torch.bfloat16, 'float16': torch.float16}[dtype]
ctx = nullcontext() if device_type == 'cpu' else torch.amp.autocast(device_type=device_type, dtype=ptdtype)
scaler = torch.cuda.amp.GradScaler(enabled=(dtype == 'float16'))# 训练循环中:
with ctx: # 启用混合精度logits, loss = model(X, Y)
scaler.scale(loss).backward() # 梯度缩放防止下溢
scaler.step(optimizer) # 参数更新
scaler.update() # 缩放器重置
autocast:自动为算子选择合适精度,关键部分保持float32GradScaler:放大梯度防止float16训练时的下溢问题
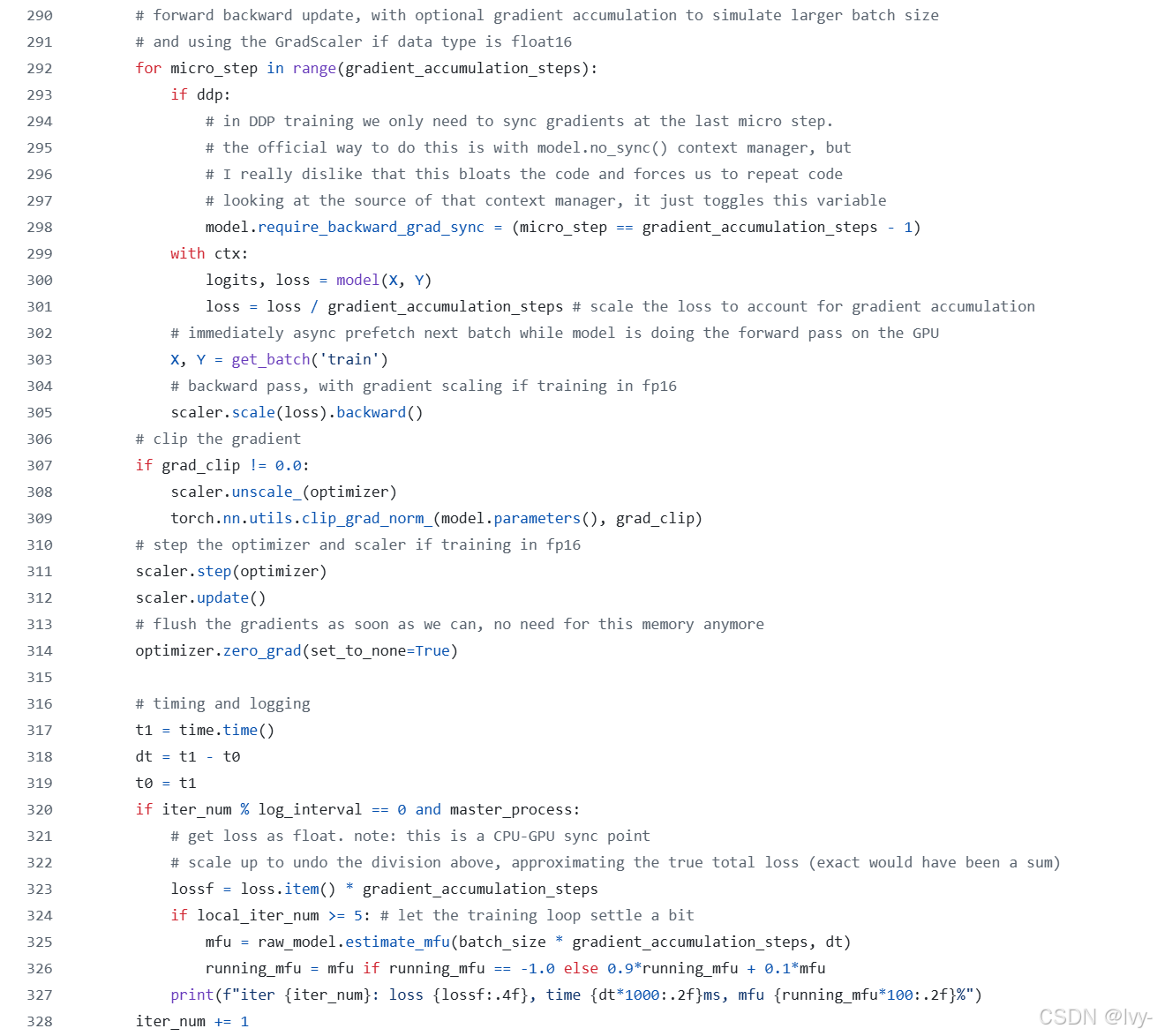
6. 梯度累积
当GPU显存不足支持大批量时,可通过梯度累积模拟大批量效果:
# 摘自train.py(简化版)
for micro_step in range(gradient_accumulation_steps):with ctx:logits, loss = model(X, Y)loss = loss / gradient_accumulation_steps # 损失归一化scaler.scale(loss).backward() # 梯度累积# 所有微批次处理后:
scaler.step(optimizer) # 统一更新参数
scaler.update()
optimizer.zero_grad() # 清空梯度
通过将总损失除以累积步数,确保最终梯度等效于大批量训练。
7. 分布式训练(DDP)
大规模训练需使用**分布式数据并行(DDP)**跨多GPU/多机器训练:
# 摘自train.py(简化版)
ddp = int(os.environ.get('RANK', -1)) != -1 # 检查DDP是否启用
if ddp:init_process_group(backend=backend) # 初始化进程通信model = DDP(model, device_ids=[ddp_local_rank]) # 包装模型# 训练循环中:
for micro_step in range(gradient_accumulation_steps):if ddp:# 仅在最后微步同步梯度减少通信开销model.require_backward_grad_sync = (micro_step == gradient_accumulation_steps - 1)# ...(常规训练步骤)...
- 进程组初始化:建立GPU间通信管道
- DDP包装器:自动处理梯度同步
- 梯度同步优化:只在必需时进行通信
🎢核心训练循环
train.py的主循环是while True结构,持续运行直到达到max_iters。以下是其关键流程:
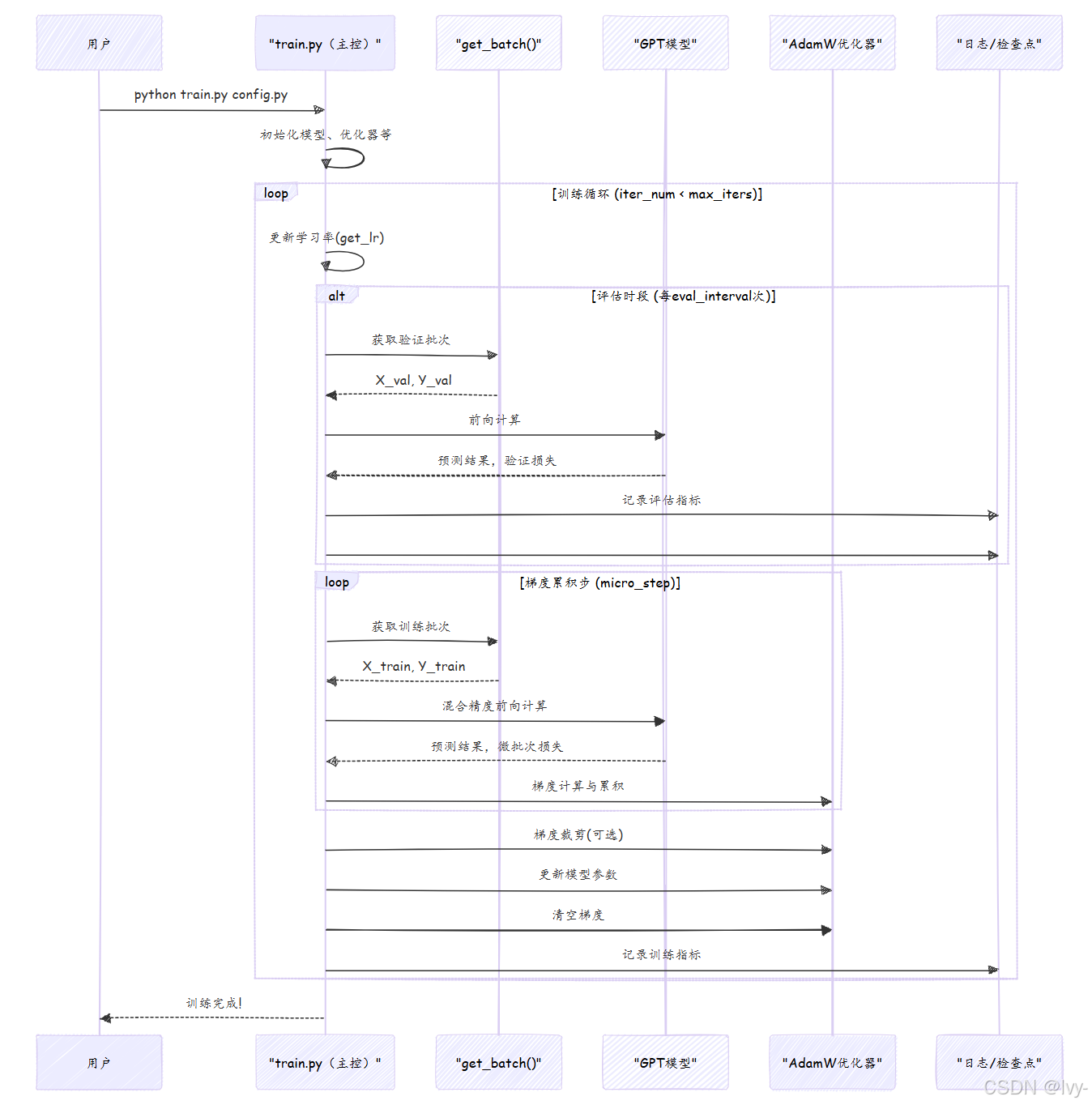
核心代码结构:
# 摘自train.py(主循环核心)
X, Y = get_batch('train') # 首次数据加载
while True:# 1. 学习率更新lr = get_lr(iter_num) if decay_lr else learning_rate# 2. 定期评估if iter_num % eval_interval == 0:losses = estimate_loss()# ...(保存检查点逻辑)...# 3. 梯度累积训练for micro_step in range(gradient_accumulation_steps):with ctx:logits, loss = model(X, Y)loss = loss / gradient_accumulation_stepsX, Y = get_batch('train') # 预取下一批scaler.scale(loss).backward()# 4. 参数更新与日志scaler.step(optimizer)scaler.update()optimizer.zero_grad()# 5. 终止条件if iter_num > max_iters:break
小结
我们剖析了nanoGPT训练流程的指挥系统,涵盖:
- 数据管道:
get_batch的高效数据供给 - 优化机制:AdamW优化器的参数更新策略
- 学习率调度:动态调整训练节奏的
get_lr - 评估体系:双模式下的性能监控
- 加速技术:混合精度与梯度累积的协同优化
- 扩展能力:多GPU分布式训练集成
理解这套编排机制是掌握语言模型学习原理的关键。
现在模型已具备学习能力,下一步是探索如何保存学习成果及加载预训练模型。
下一章:检查点与预训练模型加载