4D毫米波雷达MIMO天线阵列布局设计
来源哈工程硕士论文《车载毫米波雷达天线阵列设计与测角算法研究》
多输入多输出(MIMO)雷达技术一直受到汽车雷达制造商的密切关注,相较于传统的单输入多输出(single-input multiple-output,SIMO)雷达,MIMO 雷达可以使用相对较少数量的发射天线和接收天线来合成具有大孔径的虚拟阵列,进而实现高角度分辨力。同时,在 MIMO 雷达中,均匀线阵是传统的应用形式,其具有结构简单,在信号处理过程中也较为方便,因此被广泛应用。根据奈奎斯特采样定理可知,均匀线阵的阵元间距不得超过半波长,否则会产生栅瓣问题,导致测角错误。然而,在实际应用中,如果要提高汽车雷达的角度分辨力,就需要确保雷达的阵列孔径足够大。在保持均匀阵列的阵元间距符合要求的情况下,唯一的选择就是增加阵元数量来实现更大的阵列孔径,这样通常往往会导致成本大大增加。相比较而言,采用稀疏阵列就可以解决这一问题,可以使用相对较少的阵元数量来满足阵列孔径要求,实现高角度分辨力。最小冗余阵列在稀疏阵列中可以达到更大阵列孔径,具有较大的优势。因此,本章通过最小冗余阵列来进行 MIMO 雷达阵列布局设计。首先介绍了博世公司最新款角雷达的性能指标,随后设计出四发四收雷达阵列布局,并对其性能进行了分析;其次介绍了特斯拉公司的 4D 成像毫米波雷达阵列,随后设计出六发八收雷达阵列布局,并对其性能进行了分析。
博世角雷达
德国博世(Bosch)公司的车载雷达在行业内一直处于翘楚地位,其第五代车载毫米波角雷达具有较高的性能,因其安装在汽车的四个角,故称为角雷达。因此,本小节将对该款角雷达的性能指标给出详细说明。博世公司的第五代车载毫米波角雷达在实际应用中展现出了卓越的性能,其最远探测距离可以达到 160 米,方位向视场角可以达到正负 75°,同时方位向具有 4°的最高角度分辨力和 0.1°的测角精度;在俯仰向方面,视场角也可以达到正负 15°,同时俯仰向的最高角度分辨力可以做到 6°,并且测角精度达到了 0.2°。可见,该款角雷达在测角性能方面具备显著优势,这一优异性能得益于天线阵列布局的精心设计以及 DOA 算法的高效运用。在实际应用中,尤其是车载毫米波角雷达领域,人们更加关注方位向的测角性能,追求更高的角度分辨力,以提高车载雷达系统的目标识别和跟踪能力。因此,本章节的目标之一是通过对四发四收雷达天线阵列布局的设计,使其方位向的最高阵列角度分辨力达到不低于 4.5°,力求达到与博世公司第五代角雷达相似的角度分辨力水平,以满足实际应用中对方位向测角性能的要求。
4T4R 阵列布局设计
根据上述对博世公司角雷达的性能介绍,可知其测角性能具有一定的优势。因此,本小节将展开对发射阵元数为 4 且接收阵元数为 4 的角雷达阵列布局设计,通过对接收阵元和发射阵元的合理布局,使其具备方位向和俯仰向的测角功能,同时使其方位向的最高阵列角度分辨力达到不低于 4.5°。
阵列设计
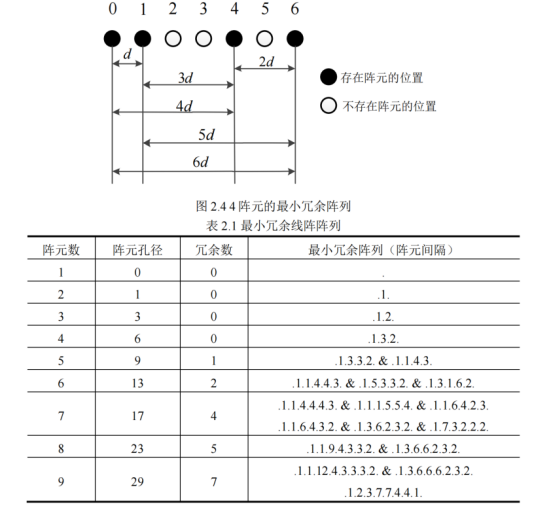
根据对稀疏阵列的分析可知,当接收阵元数为 4 时,不具备构造互质阵列的条件,但可以有效构造成最小冗余阵列和嵌套阵列,由表 2.1 和式(2-40)分别可以得知 4 阵元的最小冗余阵列的阵元位置为 ,嵌套阵列的阵元位置为 [0,1,4,6]d, d 表示为信号的半波长。可见,在接收阵元数为 4 时,最小冗余阵列所具备的阵列孔径更大,角度分辨力更高,并且此时的最小冗余阵列为最优最小冗余阵列。
因此,本节将采用最小冗余阵列进行四发四收车载毫米波角雷达阵列设计,使其在有限的阵元数和空间上达到与博世公司第五代车载毫米波角雷达相似的性能。由于所设计的四发四收雷达天线阵列布局需要同时具备方位向和俯仰向的测角功能,而接收阵列为 4 阵元最小冗余线阵,不具备俯仰向测角功能,故需要在发射天线布局上满足俯仰向的测角功能。因此,本设计将一根发射天线用于俯仰向测角,剩余三根发射天线用于方位向测角。同时,本设计的目标是方位向的最高阵列角度分辨力达到不低于 4.5°,由公式可以计算出其孔径如下:

可见,在方位向的孔径需满足大于 12.7λ,其中λ代表信号波长。通常阵列孔径一般取信号半波长的整数倍,因此需要其方位向的阵列孔径至少达到 13λ 。由于接收阵列为 4 阵元最优最小冗余阵列,其孔径为 6d 即 3λ,故发射阵元的最大间距需要至少达到 10λ。在实际应用中,雷达制造商往往对雷达尺寸具有一定的要求,需要其尽可能的小,本设计需要在满足实际雷达尺寸的前提下使其具备最大的孔径,为此在方位向的三个发射阵元所占据的位置总间距为 10.5λ,即确定了方位向的两侧两根发射阵元的位置。
接下来,需要确定方位向中间的发射阵元位置。由公式(2-33)差协同阵列可知,
其阵元间的连续位置差个数往往决定着阵列的自由度,为了提高阵列的自由度以及阵列检测信源的性能和数目,并保证差协同阵列的连续性;同时,为了满足所设计阵列的旁瓣尽可能的低,提高其抗干扰性能,避免在多目标角度估计时出现测角错误。为此,可以得出方位向中间的发射阵元位置,以第一个发射阵元为参考阵元,其中间发射阵元的位置为 4.5λ。此时,方位向的差协同阵列为连续性,可根据公式(2-33)计算其自由度为 5。随后,需要设计其俯仰向的发射阵元位置。为了使有更多的阵元用于俯仰向测角,并减少阵元之间的互耦影响,以及满足实际应用的需求。为此,将四发四收车载毫米波角雷达天线阵列布局设计如下图 3.1 所示。
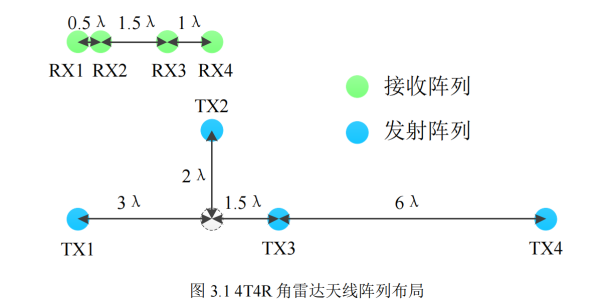
如图 3.1 所示,可以看出阵元之间的间距如图所示。可见,发射天线为二维阵列,接收天线为一维阵列,因此该阵列设计具备方位向和俯仰向的测角功能。其中,接收阵列采用 4 阵元最优最小冗余阵列,以半波长为间隔,4 个阵元分别位于 0、1、4、6(半波长的整数倍)位置,采用 MIMO 体制进行雷达测角;发射天线 TX1、TX3 和TX4 位于同一水平方向,用于方位向测角;发射天线 TX2 位于垂直方向,用于俯仰向测角。
虚拟阵列
在得到阵列布局之后进行 MIMO 雷达测角时,往往需要确定各个虚拟阵元的位置, 需要将 4 个物理接收通道数据虚拟成 16 个虚拟接收通道数据,利用其部分或者全部虚拟阵元进行角度估计。可知,在雷达进行角度估计时,可知其主要是利用接收阵元之间的波程差形成的相位差进行角度测量。从图 3.1 可以看出,四个发射阵元之间也具有一定的阵元间距,当发射阵元发射信号时,此阵元间距会产生相应的波程差。因此,当接收阵列接收第二、第三、第四个发射阵元的信号时,其接收信号会在原有波程差的基础上叠加上发射阵元的波程差,相当于间接地改变了接收阵列的位置,使其整体移动了发射阵元之间阵元间距的距离。为此,可以将其等效为图 3.2 所示的阵列形式,称之为虚拟阵列。
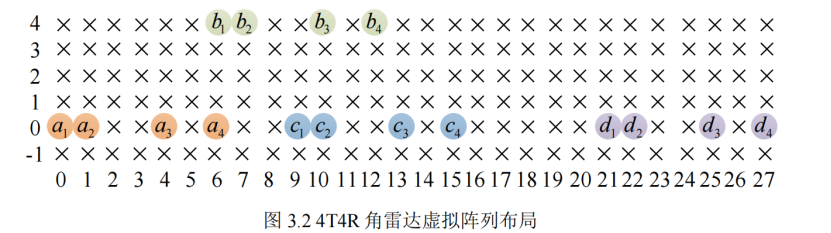
如上图所示,位置间隔是d的整数倍,其中d为信号的半波长,并以第一个接收虚拟阵元为参考阵元。发射天线 TX1、TX2、TX3 和 TX4 对应的虚拟天线分别为 a1、 a2 、 a3 、 a4、b1、b2、b3 、b4、c1 、c2、c3 、c4、d1 、d2 、d3 、d4 。其中,TX1、TX3 和 TX4 对应的虚拟阵元用于方位向测角,此时阵列孔径为 27 个半波长;TX1 对应的虚拟阵元 和 TX2 对应的虚拟阵元 以及 TX3 对应的虚拟阵元 c2 和 TX2 对应的虚拟阵元b3 位于同一垂直方向,故用于俯仰向测角,此时阵列孔径为 4 个半波长。
性能分析
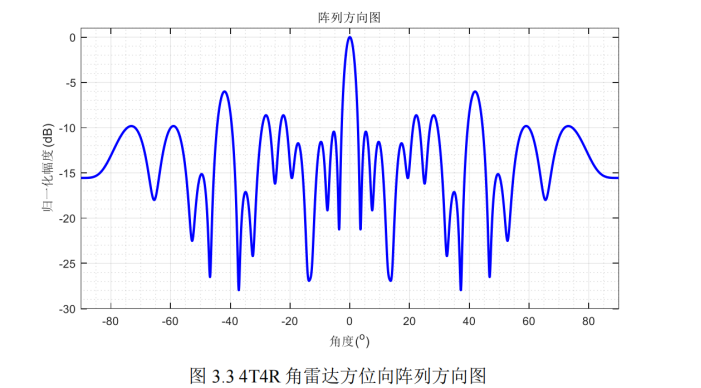
通过上述对所设计的四发四收雷达天线阵列布局与虚拟阵列的分析,可以进而得到该阵列的性能。因此,由公式(2-38)得到其对应的阵列方向图,并通过阵列方向图看其旁瓣水平与主瓣宽度,如图 3.3 所示为所设计四发四收阵列的方位向阵列方向图。从图 3.3 阵列方向图可以看出,该阵列方向图的 3dB 波束宽度为 3.27°,其旁瓣水平均低于-6dB。此时,方位向的阵列孔径为 27 个半波长,由公式(2-36)可以计算该雷达阵列的角度分辨力,即在 0°时的角度分辨力为

因此,在相同距离且相同速度的位置存在目标时,所设计的阵列可以将角度间隔差大于 4.24°的两个目标进行有效分离开,而博世公司第五代车载毫米波角雷达在方位向的角度分辨力为 4°,可见所设计的四发四收雷达天线阵列的角度分辨力与其相似,并且具有较低的旁瓣水平。
特斯拉阵列布局
随着智能驾驶的迅速发展,对毫米波雷达的性能提出越来越高的要求,因此车载4D 成像毫米波雷达应运而生。与传统毫米波雷达相比,4D 成像毫米波雷达的优势就是高分辨力,即可以使目标在距离维度和角度维度上的分辨力更高,得到的散点簇数量是传统毫米波雷达的数十倍。其中,若想提高角度维度上的分辨力,可以通过多芯片级联方式进行阵列天线设计和超分辨 DOA 估计算法实现,而阵列天线设计是首要任务。在 4D 成像毫米波雷达中,以车企特斯拉(Tesla)公司为首纷纷投入研发,旨在研发出高性能 4D 成像毫米波雷达,其研发出的 4D 成像毫米波雷达代表着行业先进水平。因此,本节将对特斯拉公司的 4D 成像毫米波雷达的阵列天线设计进行研究分析,其雷达阵列布局示意图如图 3.4 所示。
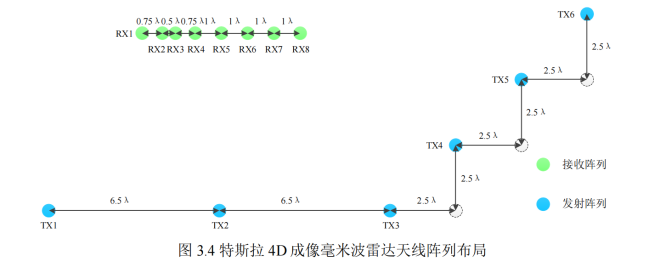
从天线阵列布局图可以看出,该款 4D 成像毫米波雷达的发射天线阵元数为 6,接收天线阵元数为 8,阵元间的间距如图所示,其中λ为信号波长。可见,接收天线RX2 和 RX3 的阵元间距与其他接收天线不同,这样设计可以对 8 个接收天线进行灵活的配置。查阅资料可知,该款 4D 成像毫米波雷达有两种工作模式。第一种是增加阵列孔径来提升角度分辨力的模式,其使用发射天线 TX1、TX2 和 TX3 以及全部的接收天线,并且接收天线 RX2 和 RX3 同时工作,将 8 阵元的接收天线等效为 7 阵元且阵元间距为一倍波长的均匀线阵,此时阵列孔径最大,可以提高角度分辨力,但会出现由于阵元间距大于半波长导致栅瓣的形成,进而出现角度模糊问题。第二种是可以同时测量方位角和俯仰角的模式,主要是增加对俯仰向的测角功能,其使用发射天线 TX3、TX4、TX5 和 TX6 以及接收天线 RX1、RX2、RX3和 RX4,此时 4 个接收天线构成非均匀阵列,可以对第一种模式导致的角度模糊进行解模糊处理。
虚拟阵列
根据上述对天线阵列布局的分析以及虚拟阵列的概念可知,可以将 8 个物理接收通道数据虚拟成 48 个虚拟接收通道数据,从而形成虚拟阵列。通过确定各个虚拟阵元的位置,在进行 MIMO 雷达测角时,可以有效利用该虚拟阵列。如图 3.5 所示为特斯拉 4D 成像毫米波雷达的虚拟阵列布局。
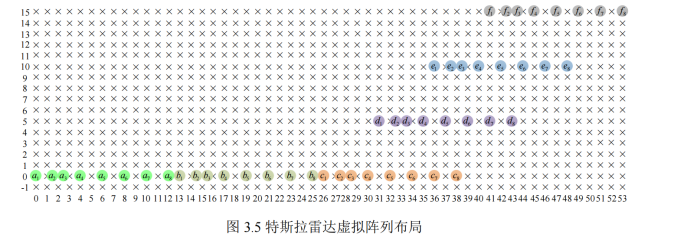
如上图所示,位置间隔是d的整数倍,其中d为信号的半波长,并以第一个接收虚拟阵元为参考阵元。发射天线 TX1~TX6 对应的虚拟天线分别为 a 1 ~a 8 、b 1~b 8、c 1~c 8 、d 1~d 8、 e 1~ e8、和 f 1~f 8。从虚拟阵列布局图可以看出,在第一种模式下,方位向的虚拟天线为a 1 ~a 8 、b 1~b 8、c 1~c 8 ,阵元孔径为 38 个半波长;在第二种模式下,方位向阵列孔径为 19 个半波长,俯仰向阵列孔径为 15 个半波长。
性能分析
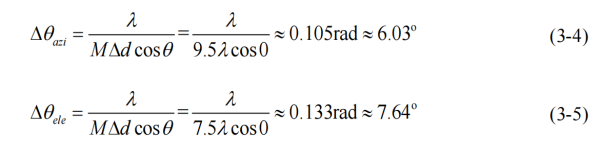
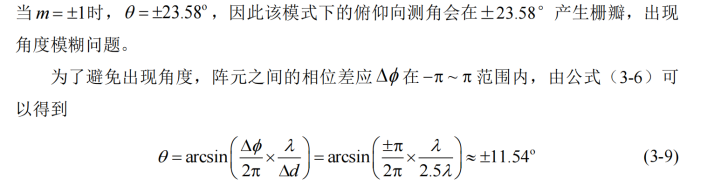
通过上述对特斯拉 4D 成像毫米波雷达的阵列布局与虚拟阵列的分析,可以由公式(2-38)得到其不同模式下的阵列方向图,并通过阵列方向图看其旁瓣水平与主瓣宽度,从而分析该雷达阵列布局的性能。如图 3.6 所示为特斯拉公司 4D 成像毫米波雷达在不同模式下的阵列方向图。其中,图 a 为在第一种模式下的方位向阵列方向图,其 3dB 波束宽度为 2.59°,此时阵列孔径为 38 个半波长,由公式(2-36)可以计算出该模式在 0°时的角度分辨力为:

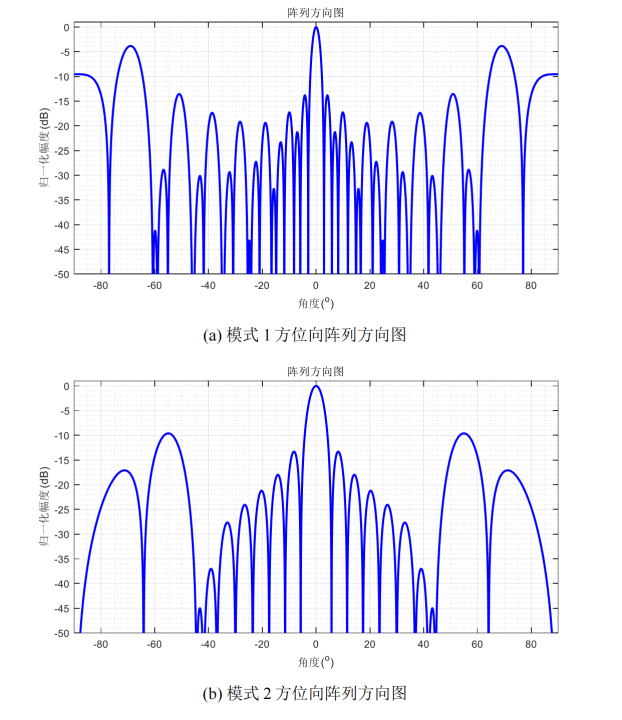
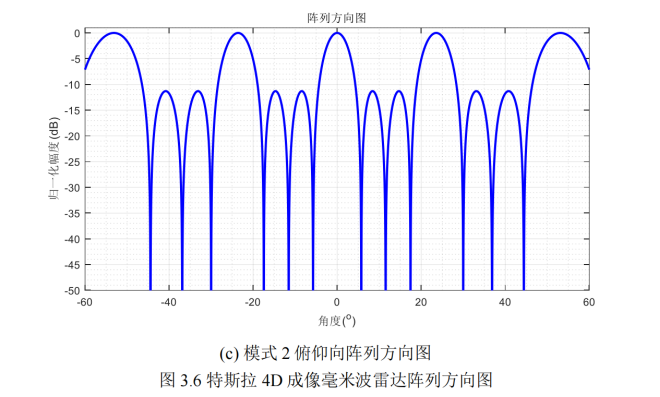
图 b 为在第二种模式下的方位向阵列方向图,其 3dB 波束宽度为 5.07°,此时阵列孔径为 19 个半波长;图 c 为在第二种模式下的俯仰向阵列方向图,其 3dB 波束宽度为 5.22°,此时阵列孔径为 15 个半波长;则由公式(2-36)可以计算出该模式在 0°时的方位向和俯仰向角度分辨力分别为:
同时,从图 c 中可以看出会有栅瓣的产生,这是由于均匀阵列中阵元间距大于半波长导致的结果。由公式(2-6)可以得知由阵元间距形成的相位差可以表示为:
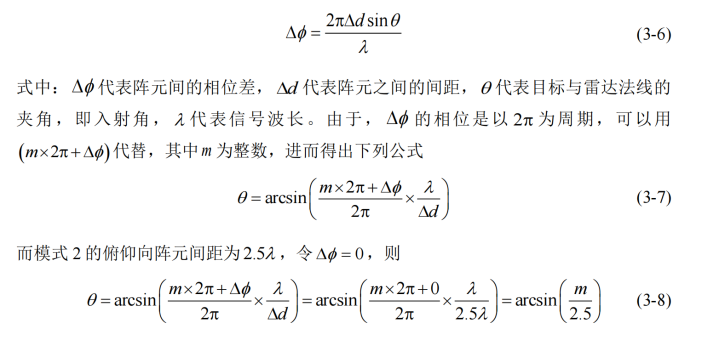
因此,当目标位于雷达俯仰向法线±11.54°时,不会出现角度模糊问题。
6T8R 阵列布局设计
根据上一节对特斯拉公司 4D 成像毫米波雷达的天线阵列布局以及性能分析,可以看出其具有显著的性能优势。因此,本节将展开对六发八收 4D 成像毫米波雷达的天线阵列布局设计,旨在使所设计阵列的性能与特斯拉公司 4D 成像毫米波雷达阵列的性能相当。
阵列设计
受特斯拉公司雷达阵列布局的启发,本文将采用其雷达的发射阵列布局形式进行发射阵列的布局设计,即:三个发射阵元位于水平方向,用于更高角度分辨力的方位向测角;另外三个发射阵元以阶梯式布局位于垂直方向,用于俯仰向测角和低角度分辨力的方位向测角。在实际应用中,雷达制造商对 4D 成像毫米波雷达的尺寸也具有一定要求,需要在有限的空间和阵元数下尽可能的增加阵列孔径,以提高阵列的角度分辨力。对于接收阵列的布局设计,本设计依旧选择最小冗余阵列作为阵列设计的基础, 由表 2.1 可知,8 阵元的最小冗余阵列孔径较大,这就要求发射阵元之间的阵元间距也较大,会导致无法在有限的尺寸下有效进行阵列布局。为此,本设计对其进行优化,将 8 阵元的接收阵列优化为由两个 4 阵元的最优最小冗余阵列组成,即两级最小冗余阵列,并在两个 4 阵元的最优最小冗余阵列之间保持一定的间距,以便于方位向的其它两个发射阵元的虚拟阵元可以有效填补该孔洞,进而确定两级最小冗余阵列之间的间距以及三个发射阵元之间的阵元间距。此外,为了有效进行俯仰向测角,这就要求同一垂直方向拥有更多的阵元,同时为了确保其俯仰向的不模糊测角范围大于特斯拉雷达的不模糊测角范围,需要缩短其垂直方向的阵元间距。因此,将六发八收 4D 成像毫米波雷达的阵列布局设计如下图 3.7 所示。
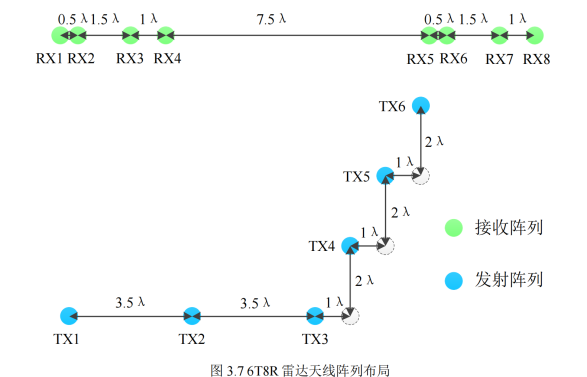
从图 3.7 中可以看出,发射阵元与接收阵元之间具体的阵元间距,其中 λ为信号波长。同时,从天线阵列布局图可以看出,发射天线阵元数为 6,阵列布局形状与特斯拉雷达的发射天线阵列布局相似,并且均采用两种测角模式,即:模式 1 为采用发射天线 TX1、TX2 和 TX3 进行大孔径方位向测角,提高角度分辨力;模式 2 为采用发射天线 TX3、TX4、TX5 和 TX6 进行方位向和俯仰向测角,主要增加对俯仰向的测角功能,其中在方位向测角时,接收阵元选用 RX1~RX4 天线。接收天线阵元数为 8,则由两个4 阵元最优最小冗余阵列组成,其两个最小冗余阵列之间的间距为 7.5 λ。
虚拟阵列
通过上述对天线阵列布局设计的分析以及虚拟阵列的概念可知,可以通过发射天线与接收天线之间的阵元间距得出虚拟阵列,将 8 个物理接收通道数据虚拟成 48 个虚拟接收通道数据。在进行 MIMO 测角时,可以有效利用虚拟阵元的位置进行大孔径测角。如图 3.8 所示为本文所设计的六发八收 4D 成像毫米波雷达的虚拟阵列。
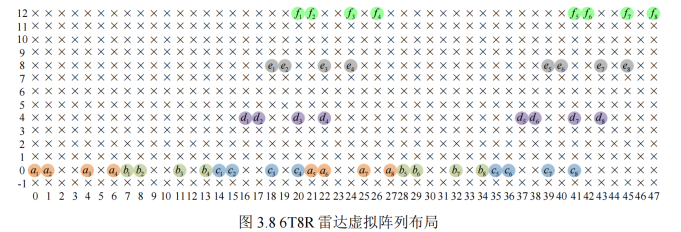
如上图所示,位置间隔是d的整数倍,其中代表信号的半波长。从虚拟阵列布局图可以看出,发射天线 TX1~TX8 对应的虚拟接收天线分别为 a 1 ~a 8 、b 1~b 8、c 1~c 8 、d 1~d 8、 e 1~ e8、和 f 1~f 8。在模式1的情况下,虚拟阵元相互嵌套交织在一起,形成具有 41 个半波长的阵列孔径,而特斯拉公司的雷达在模式1下的阵列孔径为 38个半波长,可见所设计阵列的角度分辨力大于特斯拉公司雷达的角度分辨力;在模式2的情况下,方位向是由4个4阵元最优最小冗余阵列组成,阵列孔径等效为12 个半波长,俯仰向是由等效为阵元间距为4个半波长的 4阵元均匀线阵,阵列孔径为 12 个半波长。
性能分析
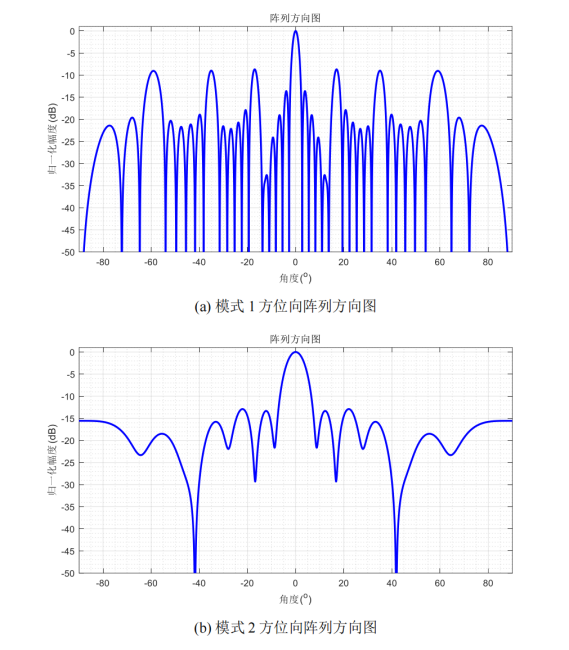
通过上述对所设计的六发八收 4D 成像雷达的天线阵列布局和虚拟阵列布局分析, 可以由公式(2-38)得到其两种测角模式下的阵列方向图,通过观察阵列方向图的主瓣宽度与旁瓣水平,可以进而分析出该阵列布局的性能。如图 3.9 为所设计阵列在两种测角模式下的阵列方向图。其中,图 a 为模式 1 下的方位向阵列方向图,可以看出该主瓣 3dB 波束宽度为 2.41°,旁瓣水平均在-8dB 以下,此时阵列孔径为 41 个半波长,由公式(2-36)可以计算出该模式在 0°时的角度分辨力为:

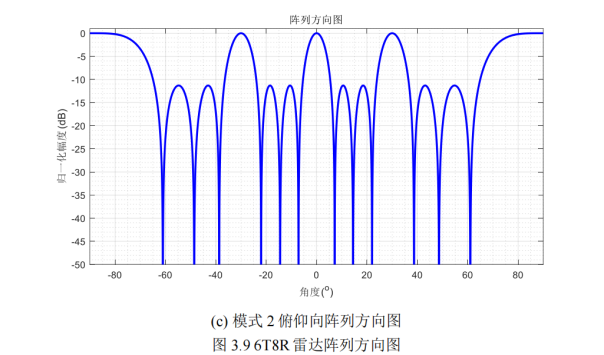
图 b 为模式 2 下的方位向阵列方向图,此时阵列孔径为 12 个半波长,该主瓣 3dB波束宽度为 7.73°,旁瓣水平均在-12dB 以下;图 c 为模式 2 下的俯仰向阵列方向图,阵列孔径为 12 个半波长,该主瓣 3dB 波束宽度为 6.52°。由公式(2-36)可以计算出该模式在 0°时的角度分辨力分别为:
同时,从图c可以看出会有栅瓣情况,易导致角度糊问题,由公式(3-7)可以计算出栅瓣位置,当m=±1时,该模式下的俯仰向测角会在士30°产生栅瓣,出现角度模糊。因此,由公式(3-9)可以得出,俯仰向测角范围在-14.48°~14.48°不会出现角度模糊问题。
通过对特斯拉公司 4D 成像雷达阵列的性能分析以及对所设计的六发八收雷达天线
阵列的性能分析,总结如表 3.1 所示。
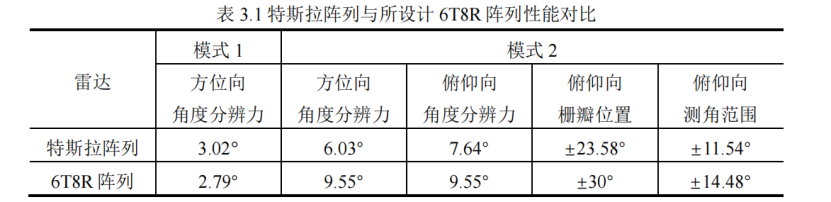
从上表可以看出,在模式 1 大孔径测角时,所设计 6T8R 阵列的角度分辨力优于特斯拉公司阵列的角度分辨力;而在模式 2 测角时,特斯拉公司阵列则在角度分辨力占据优势,但在俯仰向最大测角范围时,所设计的 6T8R 阵列占据优势。并且在两种模式下的阵列方向图对比中,所设计的 6T8R 阵列旁瓣水平较低。因此可见,所设计的阵列与特斯拉公司的阵列性能相当。